线程栈
RT-Thread 线程具有独立的栈,当进行线程切换时,会将当前线程的上下文存在栈中,当线程要恢复运行时,再从栈中读取上下文信息,进行恢复。
线程栈还用来存放函数中的局部变量:函数中的局部变量从线程栈空间中申请;函数中局部变量初始时从寄存器中分配(ARM 架构),当这个函数再调用另一个函数时,这些局部变量将放入栈中。
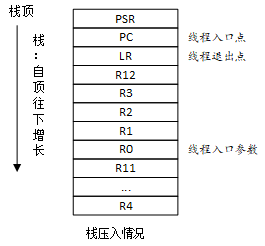
对于线程第一次运行,可以以手工的方式构造这个上下文来设置一些初始的环境:入口函数(PC 寄存器)、入口参数(R0 寄存器)、返回位置(LR 寄存器)、当前机器运行状态(CPSR 寄存器)。
线程栈的增长方向是芯片构架密切相关的,RT-Thread 3.1.0 以前的版本,均只支持栈由高地址向低地址增长的方式,对于 ARM Cortex-M 架构,线程栈可构造如下图所示。
线程栈大小可以这样设定,对于资源相对较大的 MCU,可以适当设计较大的线程栈;也可以在初始时设置较大的栈,例如指定大小为 1K 或 2K 字节,然后在 FinSH 中用 list_thread 命令查看线程运行的过程中线程所使用的栈的大小,通过此命令,能够看到从线程启动运行时,到当前时刻点,线程使用的最大栈深度,而后加上适当的余量形成最终的线程栈大小,最后对栈空间大小加以修改。
线程状态
线程运行的过程中,同一时间内只允许一个线程在处理器中运行,从运行的过程上划分,线程有多种不同的运行状态,如初始状态、挂起状态、就绪状态等。在 RT-Thread 中,线程包含五种状态,操作系统会自动根据它运行的情况来动态调整它的状态。
RT-Thread 中线程的五种状态
-
初始状态
当线程刚开始创建还没开始运行时就处于初始状态;在初始状态下,线程不参与调度。此状态在 RT-Thread 中的宏定义为 RT_THREAD_INIT -
就绪状态
在就绪状态下,线程按照优先级排队,等待被执行;一旦当前线程运行完毕让出处理器,操作系统会马上寻找最高优先级的就绪态线程运行。此状态在 RT-Thread 中的宏定义为 RT_THREAD_READY -
运行状态
线程当前正在运行。在单核系统中,只有 rt_thread_self() 函数返回的线程处于运行状态;在多核系统中,可能就不止这一个线程处于运行状态。此状态在 RT-Thread 中的宏定义为 RT_THREAD_RUNNING -
挂起状态
也称阻塞态。它可能因为资源不可用而挂起等待,或线程主动延时一段时间而挂起。在挂起状态下,线程不参与调度。此状态在 RT-Thread 中的宏定义为 RT_THREAD_SUSPEND -
关闭状态
当线程运行结束时将处于关闭状态。关闭状态的线程不参与线程的调度。此状态在 RT-Thread 中的宏定义为 RT_THREAD_CLOSE
线程优先级
RT-Thread 线程的优先级是表示线程被调度的优先程度。每个线程都具有优先级,线程越重要,赋予的优先级就应越高,- 线程被调度的可能才会越大。
RT-Thread 最大支持 256 个线程优先级 (0~255),数值越小的优先级越高,0 为最高优先级。
在一些资源比较紧张的系统中,可以根据实际情况选择只支持 8 个或 32 个优先级的系统配置;对于 ARM Cortex-M 系列,普遍采用 32 个优先级。最低优先级默认分配给空闲线程使用,用户一般不使用。
在系统中,当有比当前线程优先级更高的线程就绪时,当前线程将立刻被换出,高优先级线程抢占处理器运行。
时间片
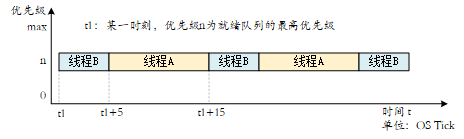
每个线程都有时间片这个参数,但时间片仅对优先级相同的就绪态线程有效。系统对优先级相同的就绪态线程采用时间片轮转的调度方式进行调度时,时间片起到约束线程单次运行时长的作用,其单位是一个系统节拍(OS Tick),详见第五章。假设有 2 个优先级相同的就绪态线程 A 与 B,A 线程的时间片设置为 10,B 线程的时间片设置为 5,那么当系统中不存在比 A 优先级高的就绪态线程时,系统会在 A、B 线程间来回切换执行,并且每次对 A 线程执行 10 个节拍的时长,对 B 线程执行 5 个节拍的时长,如下图。
线程的入口函数
线程控制块中的 entry 是线程的入口函数,它是线程实现预期功能的函数。线程的入口函数由用户设计实现,一般有以下两种代码形式:
- 无限循环模式:
在实时系统中,线程通常是被动式的:这个是由实时系统的特性所决定的,实时系统通常总是等待外界事件的发生,而后进行相应的服务:
void thread_entry(void* paramenter)
{
while (1)
{
/* 等待事件的发生 */
/* 对事件进行服务、进行处理 */
}
}
线程看似没有什么限制程序执行的因素,似乎所有的操作都可以执行。但是作为一个实时系统,一个优先级明确的实时系统,如果一个线程中的程序陷入了死循环操作,那么比它优先级低的线程都将不能够得到执行。所以在实时操作系统中必须注意的一点就是:线程中不能陷入死循环操作,必须要有让出 CPU 使用权的动作,如循环中调用延时函数或者主动挂起。用户设计这种无线循环的线程的目的,就是为了让这个线程一直被系统循环调度运行,永不删除。
- 顺序执行或有限次循环模式:
如简单的顺序语句、do whlie() 或 for()循环等,此类线程不会循环或不会永久循环,可谓是 “一次性” 线程,一定会被执行完毕。在执行完毕后,线程将被系统自动删除。
static void thread_entry(void* parameter)
{
/* 处理事务 #1 */
…
/* 处理事务 #2 */
…
/* 处理事务 #3 */
}
线程错误码
一个线程就是一个执行场景,错误码是与执行环境密切相关的,所以每个线程配备了一个变量用于保存错误码,线程的错误码有以下几种:
#define RT_EOK 0 /* 无错误 */
#define RT_ERROR 1 /* 普通错误 */
#define RT_ETIMEOUT 2 /* 超时错误 */
#define RT_EFULL 3 /* 资源已满 */
#define RT_EEMPTY 4 /* 无资源 */
#define RT_ENOMEM 5 /* 无内存 */
#define RT_ENOSYS 6 /* 系统不支持 */
#define RT_EBUSY 7 /* 系统忙 */
#define RT_EIO 8 /* IO 错误 */
#define RT_EINTR 9 /* 中断系统调用 */
#define RT_EINVAL 10 /* 非法参数 */