LDA线性判别分析
也称FLD(Fisher线性判别)是一种有监督的学习方法(supervised learning)。目的:是从高维空间中提取出最优判别力的低维特征,这些特征使同一类别的样本尽可能的靠近,同时使不同类别的样本尽可能的分开,即选择使样本的类间散布矩阵和类内散布矩阵达到最大比值的特征。因此,用FLD得到的特征不但能够较好的表示原始数据,而且更适合分类。
Fisherface是由Ronald Fisher发明的,Fisherface所基于的LDA(Linear Discriminant Analysis,线性判别分析)理论和特征脸里用到的PCA有相似之处,都是对原有数据进行整体降维映射到低维空间的方法。
1、数据集是二类情况
通常情况下,待匹配人脸要和人脸库内的多张人脸匹配,所以这是一个多分类的情况。出于简单考虑,可以先介绍二类的情况然后拓展到多类。假设有二维平面上的两个点集(x是包含横纵坐标的二维向量),它们的分布如下图(分别以蓝点和红点表示数据):
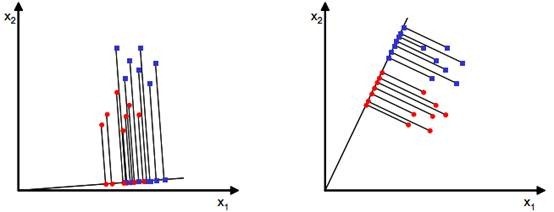
原有数据是散布在平面上的二维数据,如果想用一维的量(比如到圆点的距离)来合理的表示而且区分开这些数据,该怎么办呢?一种有效的方法是找到一个合适的向量w(和数据相同维数),将数据投影到w上(会得到一个标量,直观的理解就是投影点到坐标原点的距离),根据投影点来表示和区分原有数据。我们将这个最佳的向量称为w(d维),那么样例x(d维)(此处d=2)到w上的投影可以用下式来计算(投影点到到原点的距离):
上图给出了两种w方案,w以从原点出发的直线来表示,直线上的点是原数据的投影点。直观判断右侧的w更好些,其上的投影点能够合理的区分原有的两个数据集。但是计算机不知道这些,所以必须要有确定的方法来计算这个w。
从直观上来看,右图比较好,可以很好地将不同类别的样本点分离。
接下来我们从定量的角度来找到这个最佳的w。
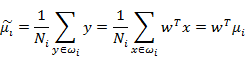
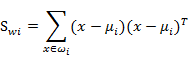
1、首先计算每类数据的均值(中心点):

这里的i是数据的分类个数,代表某个分类下的数据点数,比如
代表红点的中心,
代表蓝点的中心。
2、数据点投影到w上的中心为:
如何判断向量w最佳呢,可以从两方面考虑:
1、不同的分类得到的投影点要尽量分开;
2、同一个分类投影后得到的点要尽量聚合。
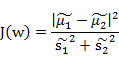
从这两方面考虑,可以定义如下公式:
1、J(w)代表不同分类投影中心的距离,它的值越大越好。
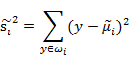
2、称之为散列值(scatter matrixs),代表同一个分类投影后的散列值,也就是投影点的聚合度,它的值越小代表投影点越聚合。(投影在特征向量上的点,与投影中心的距离差的平方和)
只考虑J(w)行不行呢?不行,看下图:
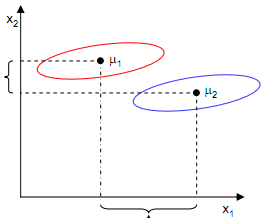
样本点均匀分布在椭圆里,投影到横轴x1上时能够获得更大的中心点间距J(w),但是由于有重叠,x1不能分离样本点。投影到纵轴x2上,虽然J(w)较小,但是能够分离样本点。因此我们还需要考虑样本点之间的方差,方差越大,样本点越难以分离。
所以要结合散列值结合两个公式,第一个公式做分子另一个做分母:
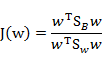
上式是w的函数,值越大,说明w降维性能越好,所以下面的问题就是求解使上式取最大值的w。
这正是LDA的基本思想是:
找到一个最佳的判别矢量空间w,使得投影到该空间的样本的类间离散度与类内离散度比达到最大。
如何求解?
把散列函数展开:

我们定义上式中中间那部分
这个公式的样子不就是未除以样例数的协方差矩阵么,称为散列矩阵(scatter matrices),这就是原数据的散列矩阵了,对于固定的数据集来说,它的散列矩阵也是确定的。
我们定义为类内散列矩阵:
, 回到上面
的公式,并用
做替换,得到:


展开J(w)的分子并定义,
称为类间散列矩阵。

这样就得到了J(w)的最终表示:
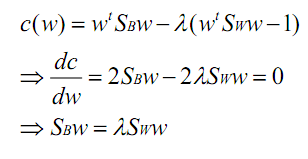
上式求极大值可以利用拉格朗日乘数法, 在我们求导之前,需要对分母进行归一化,因为不做归一的话,w扩大任何倍,都成立,我们就无法确定w。怎么确定最好的w呢。
可以令
用到了矩阵微积分,w是矩阵,求导时可以简单地把![]() 当做
当做看待。如果
可逆,那么将求导后的结果两边都乘以
,得
![]()
可以发现w其实就是矩阵 的特征向量。我们把w求解问题转化为了求解特征向量。
的特征向量。我们把w求解问题转化为了求解特征向量。
通过上式求解w还是有些困难的,而且w会有多个解,考虑下式:
将其带入下式:
其中是以w为变量的数值,因为(u1-u2)^T和w是相同维数的,前者是行向量后者列向量。继续带入以前的公式:
代入最后的特征值公式得
![]()
由于对w扩大缩小任何倍不影响结果,因此可以约去两边的未知常数和
,得到
![]()
我们只需要求出原始样本的均值和方差,( 为类内散列矩阵)就可以求出最佳的方向w。
为类内散列矩阵)就可以求出最佳的方向w。
2、数据集是多类的情况
假设有C个人的人脸图像,每个人可以有多张图像,所以按人来分,可以将图像分为C类,这节就是要解决如何判别这C个类的问题。判别之前需要先处理下图像,将每张图像按照逐行逐列的形式获取像素组成一个向量,和第一节类似设该向量为,设向量维数为n(像素数),设x为n*1的列向量。这里的n有可能成千上万,比如100x100的图像得到的向量为10000维,所以第一节里将x投影到一个向量的方法可能不适用了,比如下图:
平面内找不到一个合适的向量,能够将所有的数据投影到这个向量而且不同类间合理的分开。所以我们需要增加投影向量w的个数(当然每个向量维数和数据是相同的,不然怎么投影呢),假设我们有C个类别,需要k维向量(或者叫做基向量)来做投影:
![]()
是n维的列向量,所以W是个n*k的矩阵,这里的k其实可以按照需要随意选取,只要能合理表征原数据就好。
我们将样本点在这k维向量投影后结果表示为![]() ,有以下公式成立
,有以下公式成立
![]()
![]()
所以这里的y是k维的列向量。
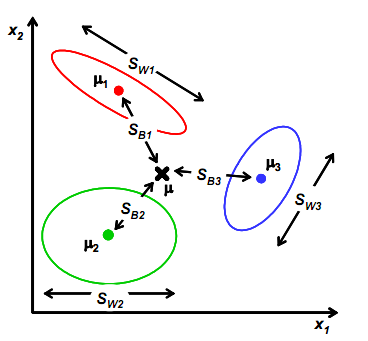
像上一节一样,我们将从投影后的类间散列度和类内散列度来考虑最优的w,考虑图(2)中二维数据分为三个类别的情况。与第一节类似,依然代表类别i的中心,而
定义如下:

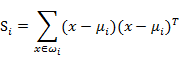
其中:
代表类别i的类内散列度,它是一个n*n的矩阵。
所有x的中心μ定义为:
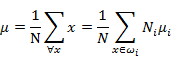
类间散列度定义和上一节有较大不同:
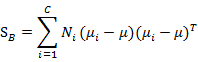
代表类别i内x的个数,也就是某个人的人脸图像个数。
上面的讨论都是投影之间的各种数据,而J(w)的计算实际是依靠投影之后数据分布的,所以有:


上式分别代表投影后的类别i的中心,所有数据的中心,类内散列矩阵,类间散列矩阵。
与上节类似J(w)可以定义为:


回想我们上节的公式J(w),分子是两类中心距,分母是每个类自己的散列度。现在投影方向是多维了(好几条直线),分子需要做一些改变,我们不是求两两样本中心距之和(这个对描述类别间的分散程度没有用),而是求每类中心相对于全样本中心的散列度之和。得到:
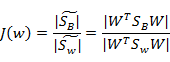
最后化为:
最终转化为求解矩阵 的特征向量,然后根据需求取前k个特征值最大的特征向量。
的特征向量,然后根据需求取前k个特征值最大的特征向量。
进行人脸识别时,将人脸向量投影到LDA子空间w,得到一个低维向量 : ,其中
另外还需注意:
由于![]() 中的
中的![]() 秩为1,因此
秩为1,因此![]() 的秩至多为C(矩阵的秩小于等于各个相加矩阵的秩的和,C是类别个数)。由于知道了前C-1个
的秩至多为C(矩阵的秩小于等于各个相加矩阵的秩的和,C是类别个数)。由于知道了前C-1个![]() 后,最后一个
后,最后一个![]() 可以有前面的
可以有前面的![]() 来线性表示,因此
来线性表示,因此![]() 的秩至多为C-1。那么K最大为C-1,即矩阵的特征向量个数至多有C-1个。特征值大的对应的特征向量分割性能最好。那么至多可以取到N-1个特征向量来表征原数据。(存疑)
的秩至多为C-1。那么K最大为C-1,即矩阵的特征向量个数至多有C-1个。特征值大的对应的特征向量分割性能最好。那么至多可以取到N-1个特征向量来表征原数据。(存疑)
大家知道PCA里求得的特征向量都是正交的,但是这里的![]() 并不是对称的,所以求得的K个特征向量不一定正交,这是LDA和PCA最大的不同。
并不是对称的,所以求得的K个特征向量不一定正交,这是LDA和PCA最大的不同。
如前所述,如果在一个人脸集合上求得k个特征向量,还原为人脸图像的话就像下面这样:
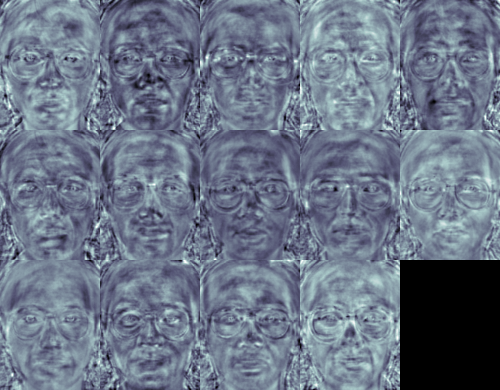
得到了k个特征向量,如何匹配某人脸和数据库内人脸是否相似呢,方法是将这个人脸在k个特征向量上做投影,得到k维的列向量或者行向量,然后和已有的投影求得欧式距离,根据阈值来判断是否匹配。需要说明的是,LDA和PCA两种方法对光照都是比较敏感的,如果你用光照均匀的图像作为依据去判别非均匀的,那基本就惨了。
3、Opencv中的LDA
3.1、LDA的两个基本用途:
降维和分类器(例如OpenCV中将LDA和K邻近分类器封装为一个“分类器”,这里K=1。所以本质还是降维和使数据易于可分)
1)训练模型
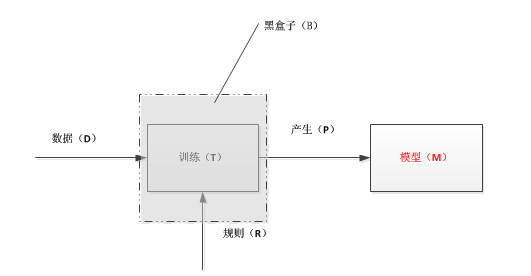
- 数据(D):高维特征矢量
- 训练(T):操作模式
- 规则(R):训练数据的规则
- 黑盒子(B):如果我们只是想应用而不想理解其内部的复杂原理,我们可以不关系黑盒子里面是如何操作的。
- 模型(M):训练的结果,即产生(P)一个模型,这里是上面描述的一个矢量空间。
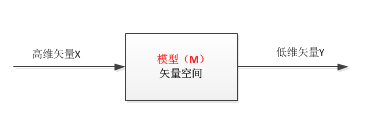
2)将高维数据送入模型实现降维
3.2、LDA分类器思想:
这里的分类思想,是OpenCV一种封装的分类思想,OpenCV在人脸识别算法中将LDA+(K=1)邻近分类器组合,构造所谓的“合成分类器”,相当于类中的封装。
1)将所有训练样本图像投影到LDA子空间
2)将测试图像投影到LDA子空间
3)找到投影后的训练样本集和测试图像之间的最邻近,即如果测试图像与训练样本中的b最邻近,b属于C类,那么测试图像也属于C类。
3.3、LDA代码
OpenCV为我们实现了LDA类,
LDA类的构造函数:
LDA(const Mat& src, vector<int> labels,int num_components = 0):_num_components(num_components)
{
this->compute(src, labels); //! compute eigenvectors and eigenvalues
} - 矩阵src以行存储训练样本矢量,行数表示训练样本的总数,列数表示样本矢量(特征矢量)的维数
- abels是与训练样本所对应的类别。此构造函数要求输入数据格式严格。
- 参数num_components=0采用默认,由给定数据自动判决
LDA::project
//投影样本到LDA子空间
// Projects samples into the LDA subspace.
Mat LDA::project(InputArray src) {
return subspaceProject(_eigenvectors, Mat(), _dataAsRow ? src : src.getMat().t());
} 3.4、应用降维思路:
训练数据的处理:
1、循环读入训练图像Mat,并将Mat对象存储到vector<Mat>容器中,同时新建一个Mat对象,或行矢量或列矢量来存储类别标签。
2、将步骤1中的数据传入到LDA的构造函数中,构造函数进行计算处理,从而获得特征矢量。
3、将训练数据利用project函数,投影到特征矢量构造的子空间,即LDA子空间,将返回的Mat矢量保存起来,做后续的处理。
4、将LDA对象,利用save保存起来。
测试数据的处理:
1、利用load函数将LDA导入
2、利用project函数,将测试数据投影到LDA子空间,保存返回的Mat矢量,做后续的处理。
4、PCA+LDA
转换矩阵,可以将样本投影到c-1维空间,其中c表示类别。
投影公式为:
表示LDA的特征矢量构成的,
表示PCA的特征矢量构成的,u是PCA分析中所有样本的均值。z矢量的维数为类别数目-1.
PCA对光照的灵敏度较高。LDA对光照不如PCA对光照的敏感。LDA的性能同样严重的依赖于输入的数据。
LDA也可以像PCA那样对图像进行重建,但是LDA重建效果没有PCA好,这是因为PCA利用的个体的主成份特征,而LDA利用了辨别个体之间不同的特征。
Fisher face方法(PCA+LDA)在OpenCV中的实现请参考:OpenCV人脸识别类FaceRecognizer
from:https://blog.csdn.net/zhazhiqiang/article/details/21189415
from:https://blog.csdn.net/smartempire/article/details/23377385
from:http://www.cnblogs.com/jerrylead/archive/2011/04/21/2024384.html