前言
1.直线检测在好多实现应用中能用到到,我之前做过扫描件检测时用直线检测来处理判断页面是否水平,还有在辅助驾驶中的车道偏离预警系统也有过应用。
2.我的编程环境是Windows 7 64位,IDE是VS2015,配置了OpenCV3.3与OpenCV_Contrib,实现语言是C++。是于如果配置以上的环境,可以看我之前写的博文。
一、概述
1.直线检测的原理介绍
(1)对于直角坐标系中的任意一点A(x0,y0),经过点A的直线满足Y0=kX0+b.(k是斜率,b是截距)。
(2)那么在X-Y平面过点A(x0,y0)的直线簇可以用Y0=kX0+b表示,但对于垂直于X轴的直线斜率是无穷大的则无法表示。因此将直角坐标系转换到极坐标系就能解决该特殊情况。
(3)在极坐标系中表示直线的方程为ρ=xCosθ+ySinθ(ρ为原点到直线的距离)。
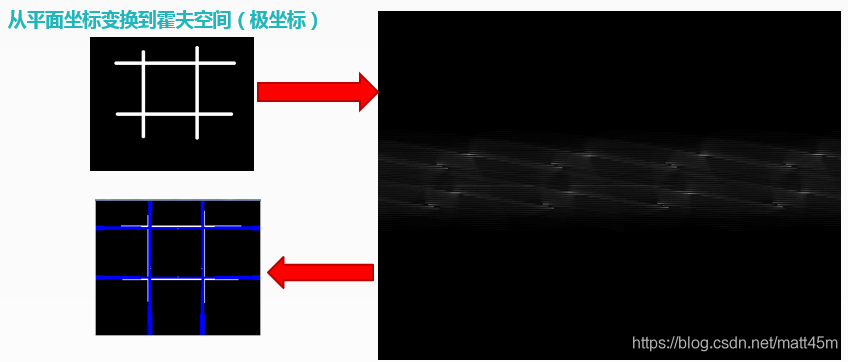
(4)对于任意一条直线上的所有点来说,变换到极坐标中,从[0~360]空间,可以得到r的大小,属于同一条直线上点在极坐标空(r, theta)必然在一个点上有最强的信号出现,根据此反算到平面坐标中就可以得到直线上各点的像素坐标。从而得到直线。
2.OpenCV封装有直线检测的函数,HoughLines()和HoughLinesP(),它们都能实现直线检测,差别是:HoughLines()函数使用标准的Hough变换HoughLinesP()函数使用概率Hough变换,即只通过分析点的子集并估计这些点都属于一条直线的概率,这在计算速度上更快。
(1)HoughLines()函数说明:
HoughLines(
InputArray src, // 输入图像,必须8-bit的灰度图像
OutputArray lines, // 输出的极坐标来表示直线
double rho, // 生成极坐标时候的像素扫描步长
double theta, //生成极坐标时候的角度步长,一般取值CV_PI/180
int threshold, // 阈值,只有获得足够交点的极坐标点才被看成是直线
double srn = 0;// 是否应用多尺度的霍夫变换,如果不是设置0表示经典霍夫变换
double stn = 0;//是否应用多尺度的霍夫变换,如果不是设置0表示经典霍夫变换
double min_theta = 0; // 表示角度扫描范围 0 ~180之间, 默认即可
double max_theta = CV_PI
)
(2)HoughLinesP()函数说明:
HoughLinesP(
InputArray src, // 输入图像,必须8-bit的灰度图像
OutputArray lines, // 输出的极坐标来表示直线
double rho, // 生成极坐标时候的像素扫描步长
double theta, //生成极坐标时候的角度步长,一般取值CV_PI/180
int threshold, // 阈值,只有获得足够交点的极坐标点才被看成是直线
double minLineLength = 0;// 最小直线长度
double maxLineGap = 0;// 最大间隔
)
二、代码演示
1.传入一张图像,把所有直线画出来。
void lineDetection(string image_path)
{
Mat src, src_gray, dst;
src = imread(image_path);
if (!src.data)
{
std::cerr << "无法打开图像文件!" << endl;
return;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
namedWindow("hough-line-detection", CV_WINDOW_AUTOSIZE);
imshow("input image", src);
//边缘检测
Canny(src, src_gray, 150, 200);
//灰度化
cvtColor(src_gray, dst, CV_GRAY2BGR);
vector<Vec2f> lines;
//霍夫曼直线检测
Point pt1, pt2;
HoughLines(src_gray, lines, 1, CV_PI / 180, 150, 0, 0);
for (size_t i = 0; i < lines.size(); i++)
{
// 极坐标中的r长度
float rho = lines[i][0];
// 极坐标中的角度
float theta = lines[i][1];
double a = cos(theta), b = sin(theta);
double x0 = a*rho, y0 = b*rho;
// 转换为平面坐标的四个点
pt1.x = cvRound(x0 + 1000 * (-b));
pt1.y = cvRound(y0 + 1000 * (a));
pt2.x = cvRound(x0 - 1000 * (-b));
pt2.y = cvRound(y0 - 1000 * (a));
line(dst, pt1, pt2, Scalar(0, 0, 255), 1, CV_AA);
}
imshow("matt", src);
imshow("hough-line-detection", dst);
waitKey(0);
}
2.运行结果

结语
1.例子很简单,没有什么难度,但应用时肯定要按自己的数据去做相关参数的设定。
2.关于工程的源码,运行程序时的bug,都可以加这个群(487350510)互相讨论学习。