第一章 简介
Trimble MB-Two是Trimble MB-One OEM接收器模块的后继产品。
MB-Two保持与其前身相同的外形尺寸,并为客户提供直接替代,以利用最新的GNSS设计创新。
多功能,强大,紧凑和智能; Trimble MB-Two提供更快的基于双频的航向采集和改进的定位引擎以及额外的GNSS信号。
此外,两个MB-Two模块可用于精确平台定位,使用来自三个天线的数据来获得精确的位置和姿态。
- 采用Z-Blade技术的高级功能
- 用于航向+俯仰或滚转的双天线输入
- 强大的RTK引擎
操作模式
参考$ PASH专有命令中使用的术语,MB-Two板可以以下列两种模式之一运行:
•SOL模式(使用单个GNSS天线; SOLO使用“SOL”)
•DUO模式(带有两个GNSS天线)。
SOL模式
在SOL模式下,电路板由单个L1 /(L2 + L3)GNSS传感器组成,该传感器用于天线输入#1或天线输入#2。
SOL模式是电路板的默认操作模式。 也可以在运行$ PASHS,SNS命令后选择它,如下所示:
$PASHS,SNS,SOL[,d2]
注释:
•d2 = 1表示GNSS传感器始终为天线输入#1供电。
•d2 = 2表示GNSS传感器始终为天线输入#2供电。
•d2 = 0或保留为空表示GNSS传感器为检测到的天线提供服务,或者如果检测到两个天线,则为天线输入#1提供服务。
因此,当电路板在默认模式下运行时,您不必担心应该使用哪个天线输入。 只需将GNSS天线连接到两个输入中的任何一个,您的应用程序就可以在所有情况下使用。
在SOL模式下,您可以使用$ PASHS,OBS命令选择GNSS信号跟踪模式。 对于所有跟踪的信号,可能的选择是“ALL”,或者“OPT”让电路板选择可用的最佳信号。
在SOL模式下,功耗低于DUO模式。
在SOL模式下,电路板可以提供:
- •传统的自主DGNSS / DSBAS定位
- •传统的DGNSS / RTK基本功能
- •针对物理/虚拟基础或参考网络的常规RTK功能
- •使用L波段或IP参考数据的常规PPP(Trimble RTX)功能(仅适用于天线输入#1)
- •RTK针对移动基地
- •针对外部传感器数据的标题/态度
- •以上的不同组合
DUO 模式
只有在电路板中安装了固件选项[D]或[E]时,才能使用DUO模式。
在DUO模式下,电路板由两个GNSS传感器组成,每个天线输入一个。 GNSS传感器服务天线输入#1总是L1 /(L2 + L3)。
DUO模式不是电路板的默认操作模式,因此只能在运行$ PASHS,SNS命令后才能实现,如下所示:
$PASHS,SNS,DUO[,d2]
注意:
- d2 = 1表示GNSS传感器服务天线输入#2仅为L1。
- d2 = 2表示GNSS传感器服务天线输入#2是L1 /(L2 + L3)。
- d2 = 0或保留为空等效于将d2设置为“1”。
基本上,在此模式下消耗的功率比在SOL模式下消耗的功率更多。
在DUO模式中,只有GNSS传感器服务天线输入#1被允许跟踪L波段信号,条件是d2 =“0”或“1”或为空。 d2 =“2”时不允许L波段跟踪。
提醒:L波段信号跟踪允许电路板使用来自地球卫星的校正数据提供Trimble RTX定位。
在DUO模式下,电路板将始终使用可用的最佳信号进行操作,这意味着您不能使用$ PASHS,OBS命令更改GNSS信号跟踪模式。 在DUO模式下,L波段信号跟踪无条件地设置为“OPT”。
选择DUO模式后,Blade引擎自动开始计算从天线#2到天线#1的向量的航向。默认情况下,当天线输入#2仅为L1(d2 = 1)时,首先heading process 将经过校准阶段以确定基线长度。 然后用计算的基线长度约束该过程,以改善仅L1标题计算的性能。这称为固定模式下的计算方向。默认情况下,当天线输入#2为L1 /(L2 + L3)(d2 = 2)时,计算航向,而无需通过先前校准阶段确定基线长度。 这称为Flex模式下的计算标题。
然而,存在以下附加命令:
- •从flex切换到固定,反之亦然($ PASHS,3DF)
- •要求基线长度校准($ PASHS,3DF,CLB)
- •手动输入基线长度($ PASHS,3DF,V12)
- 在DUO模式下,对于两个天线同时,电路板
- 可以提供:
- •传统的自主DGNSS / DSBAS定位
- •传统的DGNSS / RTK基本功能
- •针对物理/虚拟基础或参考网络的常规RTK功能
- •使用L波段或IP参考数据的常规PPP(Trimble RTX)功能(仅适用于天线输入#1)
- •RTK针对移动基地
- •从天线#2到天线#1的矢量标题
- •针对外部传感器数据的标题/态度
- •以上的不同组合
从Web服务器中选择操作模式
转至接收器>位置>传感器/天线设置。 在“多传感器模式”字段中选择操作模式。
可用选项反映了上述两个小节中提供的解释,但使用的术语略有不同:
- •单天线(自动):SOL模式,使用最佳天线输入(默认)。
- •单天线(主要):SOL模式,使用天线输入#1(主天线)。
- •单天线(辅助):SOL模式,使用天线输入#2(辅助天线)。
- •双天线(L1 / L2 / L波段+ L1):DUO模式,GNSS传感器服务天线输入#2仅为L1。
- •双天线(L1 / L2 + L1 / L2):DUO模式,GNSS传感器服务天线输入#2是L1 /(L2 + L3),就像GNSS传感器服务天线输入#1一样。
在DUO模式下,要在“固定”和“弹性”之间进行选择,请求基线校准或输入基线长度,请转至接收器>位置>姿态/标题设置,然后在“矢量描述”窗格中进行更改。
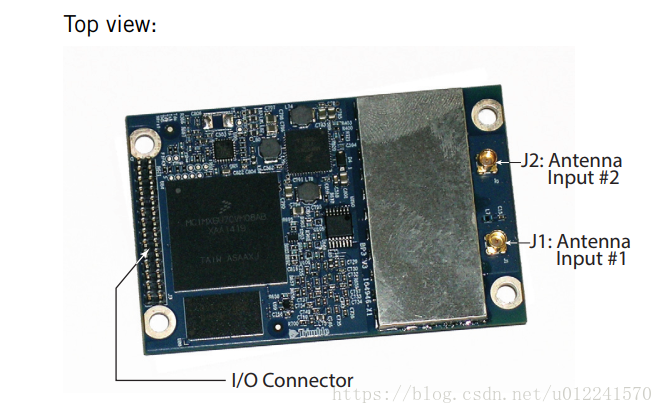
MB-两个顶部和底部视图

固件操作
使用$ PASHS安装其中一个固件选项,OPTION不足以使新的更新速率对您的消息有效。 然后,您必须使用$ PASHS,POP命令将新的更新速率应用于电路板的内部进程(请注意,这会导致将所有现有消息的更新速率重置为其默认值 - 请参阅$ PASHS,POP命令), 最后重新定义每个现有消息的更新速率。
注意:当查询当前安装的固件选项(使用$ PASHQ,RID)时,MB-Two板返回“这是一个STOCK产品,以启用GNSS跟踪和数据,您必须购买激活码”是一种“库存”产品。
这意味着该电路板仅为其硬件而购买,并且尚未安装固件选项(电路板无法跟踪任何GNSS信号,只能响应$ PASHQ,RID)。
但是,电路板已准备好使用MB Loader软件,Web服务器或命令$ PASHS,OPTION添加您将购买的新固件选项。
注意:引脚9上的复位信号不会将配置重置为出厂默认值。
引脚9控制CPU的硬件复位,建议仅在电路板挂起时使用它。 请注意,评估板上的复位按钮将引脚9连接到地。
$ PASHS,RST 复位命令将所有出厂设置变为默认值,包括每个端口的波特率。 在引脚9上发送复位信号类似于使用PASHS,INI,0命令。 CPU重新启动,但所有设置都保存在非易失性存储器中,并在重新启动后立即再次应用。 因此,电路板将保留波特率更改以及已启用的任何消息。
LED指示灯
单个LED指示灯(参见6上的位置)允许您根据不同颜色的使用情况监控电路板电源状态,每个天线接收的卫星以及与每个天线有关的当前计算状态(原始位置和时间) ,如下表所述。
颜色 含义
红色 电源
绿色 GNSS 接收
橙色 天线#1的GNSS接收和天线#2的GNSS接收之间的分隔符。
如果两个天线中的任何一个都没有计算原始位置和时间,则红色,绿色和橙色闪烁的顺序如下:
1.一次红色闪烁:表示电路板已正确供电。
2.第一个绿色闪烁序列:表示天线#1接收的GNSS卫星数量。 但是绿色闪烁的数量限制为5.这意味着当您看到绿色LED连续闪烁五次时,接收到的卫星的实际数量等于或大于5。
3.一次橙色闪烁:结束第一个绿色闪烁序列。
4.绿色闪烁的第二个序列:与第一个绿色闪烁序列相同,但这次是天线#2。
一个红色闪烁:表示新序列的开始
如上所述,闪光。
一旦计算出一个天线或两个天线的原始位置和时间,红色,绿色和橙色闪烁的顺序如下:
1.一次红色闪烁:表示电路板已正确供电。
2.长而稳定的绿色序列:现在为天线#1计算原始位置和时间。
3.一次橙色闪烁:结束天线#1的LED指示。
4.长而稳定的绿色序列:现在为天线#2计算原始位置和时间。一次红色闪烁:表示新闪烁序列的开始,如上所述。