第二章 MB-Two的第一步
使用评估套件
评估套件可用于给定应用的设计阶段,以测试该应用中电路板的性能。
电路板布局


使用AshCom与MB-Two进行沟通
AshCom是评估套件中提供的软件工具,可通过评估板与MB-2进行通信。 它以zip文件的形式提供。
安装AshCom
AshCom用户界面简介
用MB-Two建立串行连接
使用MB-Two建立TCP / IP连接
密切关注计算机的COM端口使用情况
将MB-Two连接到您的应用程序
本节总结了将电路板直接集成到应用程序中的不同连接。 这应该在您使用评估套件对电路板进行全面测试后进行,并且您已经提出了适合您应用的电路板配置。

按照以下说明并参考上图,执行MB-Two和您的应用程序之间所需的连接。
•[A],[B]:GNSS天线输入#1(J1)和#2(J2):
母MMCX直连接器。 对于每个使用的输入,请使用配有公MMCX连接器的同轴电缆将天线信号应用到电路板。
在DUO模式下,只要输入[A]和[B]上的GNSS信号保持在相似的电平,就可以保证电路板的良好性能。 您可以使用命令$ PASHQ,AST检查这些级别。 这两个级别应小于4095,并且彼此之间的差异不超过750.因此,您有责任使用合适的天线和同轴电缆。 如果一个天线与另一个天线使用非常不同长度的同轴电缆,则可能必须使用额外的前置放大器或衰减器。
重要! 使用的每个天线应包含内置LNA(低噪声放大器)。 LNA的增益减去连接LNA和MB-Two板的同轴电缆中的信号损耗应在17到47 dB(对于L1频段)和23到50 dB(对于L2频段)的范围内。
在每个GNSS天线输入的中心导体上提供直流电压,如果它大于,则可以是引脚5上提供的外部直流电压,I / O连接器(4.0到12.0 V DC,见下面的[C])。 主电源电压,否则为主电源电压。 在这种情况下,施加到天线的实际DC电源电压将是引脚6上的DC电压(即3.2至4.5 V DC)减去0.2 V.
当将天线连接到电路板的GNSS天线输入时,该DC电压用于为天线LNA供电。 内部监控直流输出电流,从中推导出天线状态:
关闭电路板前的注意事项
将MB-Two集成到您的应用程序中时,请确保以这种方式执行所有关闭序列:
- •应用以下命令,然后是15秒的空闲时间:
$ PASHS,PWR,OFF
在接下来的15秒内不要做任何事情
- •然后您可以从电路板上断开电源。
如果您没有遵守此规则,或者在运行命令后没有等待足够长的时间,则主板可能会最终丢失数据。 另请参阅PWR,OFF:关闭电路板(第266页)。
用于航向/姿态测量的GNSS天线设置
选择基线长度
理论上,基线长度(即所使用的两个GNSS天线的相位中心之间的水平距离,也称为天线分离)可以设置在30厘米和20米(或更多)之间。
在实践中,您将选择基线长度,同时考虑到预期精度水平以及车辆中的各种安装约束。
航向 - 横滚 - 俯仰偏移
航向偏移定义
理想情况下,应安装天线以产生严格平行或垂直于车辆中心线的基线。 但是,您可能还会在车辆上面临一些安装限制,迫使您以不同方式安装天线。 航向偏移描述了基线与车辆中心线的不对齐。 当基线严格平行于中心线并且基线朝向前移方向时,航向偏移为零。 在所有其他情况下,偏移量不为零,应按下图所示进行测量。
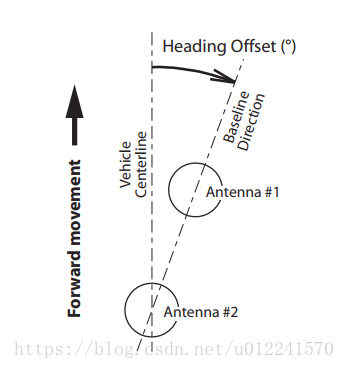
基线与车辆中心线的不对齐可能是有意的(参见下面的解释)。
Roll-Pitch Offset定义
理想情况下,您的天线应安装在同一高度。 但是,您的车辆可能面临一些安装限制,迫使您在不同高度安装天线。
如果是这种情况,您应该使用适当的仪器测量下图所示的俯仰和滚转偏移(三个天线设置)。
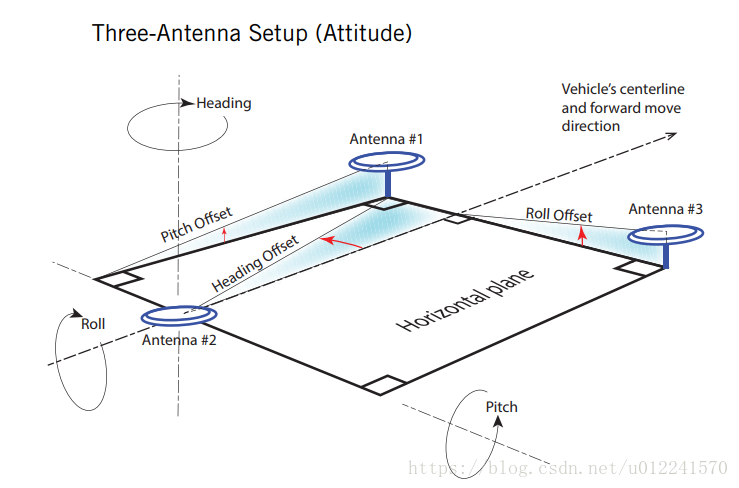
两个天线设置(航向+俯仰),基线与车辆中心线准平行:

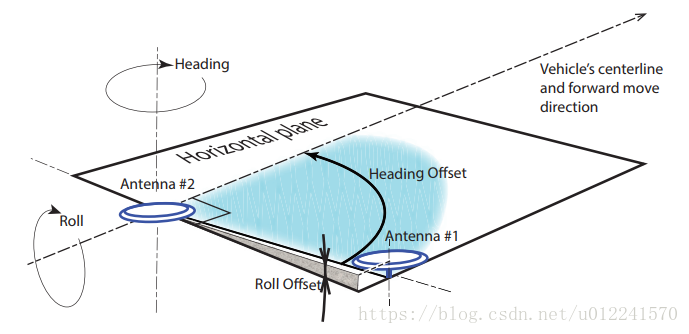
双天线设置(航向+滚动),基线准垂直于车辆中心线:
如果您不能直接测量角度,而只测量距离,您仍然可以根据距离测量计算角度,如下所述(但是您需要测量航向偏移):
俯仰和滚转偏移不应大于45度(或小于-45度),否则接收器将认为天线设置无效,因此不会进行任何航向,侧倾或俯仰测量。