第3章典型应用说明
前言
本章介绍MB-Two的典型应用,介绍支持这些操作模式的基础专有$ PASH命令。 解释这些命令,以便您可以很好地理解操作原理。
注意:请参阅“使用AshCom与MB-Two进行通信(第23页)”以了解如何将$ PASH命令发送到MB-Two。
但请记住,使用内置的Web服务器而不是在命令模式下工作通常更容易,更快捷。
注意:要熟悉内置Web服务器,请参阅第69页的“从Web服务器设置MB-2”。
然而,在为MB-Two应用程序进行原型设计时,在对应用程序进行有效实施之前测试电路板,微调电路板配置,对于一些远离常规应用的应用,或者为了测试目的,使用命令模式将 证明是一个必不可少的工具。
与板卡的接口
在本章所述的所有典型应用中,请按照第25页上的“使用MB-Two建立串行连接”中的说明,使用AshCom和串行连接与电路板通信(简而言之,在连接到端口D的计算机上运行的AshCom,例如 ;不要忘记在评估板上插入跳线J5。
初步步骤
作为设置“未知”电路板的初步步骤,重置电路板,然后阅读有关电路板的一些有用信息(标识,版本,时间和日期,端口设置)始终是一个好习惯。
重置电路板:
$ PASHS,RST
(等待大约15秒让电路板完成复位)
阅读板识别,已安装的固件和已安装的选件:
$ PASHQ,RID
读取端口设置:
$ PASHQ,PRT
阅读时间和日期:
$ PASHQ,ZDA
读取固件版本:
$ PASHQ,VER
读取安装的固件选项:
$ PASHQ,OPTION
仍然作为一个初步步骤,一些其他命令也应该例行执行,除非在您的应用程序中您同意所有默认设置,在这种情况下,不需要做任何其他事情。
启用/禁用跟踪GNSS星座; 看到:
$ PASHS,GPS $ PASHS,GLO $ PASHS,SBA $ PASHS,GAL
$ PASHS,BDS $ PASHS,QZS
天线设置; 看到:
$ PASHS,ANH $ PASHS,ANT $ PASHS,ANP,OWN / REF
$ PASHS,ANP,OUT $ PASHS,ANR
注意:有关每个命令的详细说明,请参阅第6章和第7章。
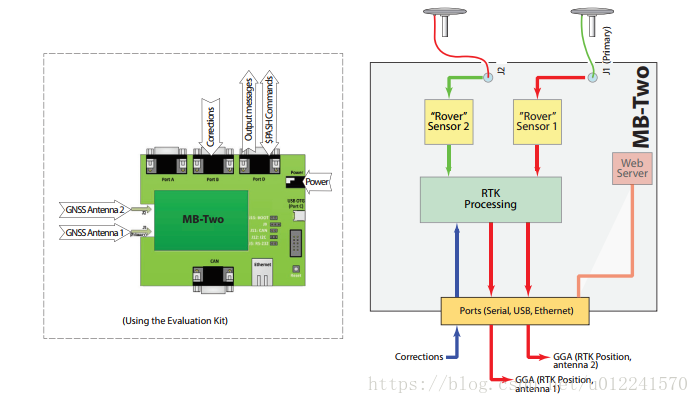
Rover Computing RTK Position
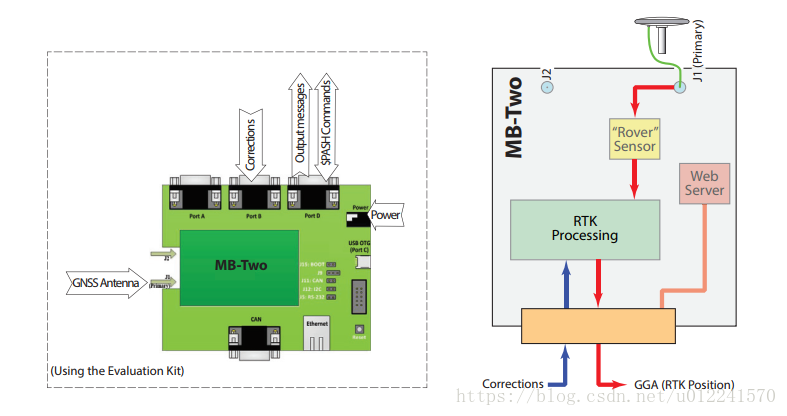
•MB-Two将使用单个传感器(天线#1传感器)运行,以提供RTK解决方案。 这就是我们所说的在SOLO模式下操作电路板。 使用此命令激活SOLO模式(“SOLO”为“SOL”):
$ PASHS,SNS,SOL
重要! 运行此命令后,电路板处于新的运行状态,就像您运行了以下命令一样:
$ PASHS,1,BLN,ON,?
$ PASHS,2,BLN,SAM
$ PASHS,3,BLN,SAM
$ PASHS,3DF,OFF
$ PASHS,RTK,ON,1,2,3
$ PASHS,BRV,OFF
•通过编程此输出消息可以获得RTK位置(例如,在端口D上,1秒):
$ PASHS,NME,GGA,d,ON,1
通过编程此输出消息可以获得RTK位置(例如,在端口D上,1秒):
$ PASHS,NME,GGA,d,ON,1

流动站计算内部航向+ RTK位置
重要:基于L1 / L2 GNSS信号的接收来计算航向,就像RTK位置一样,其优选地使用L1 + L2GPS / GLONASS / QZSS信号来计算。 因此,您应该相应地选择天线。
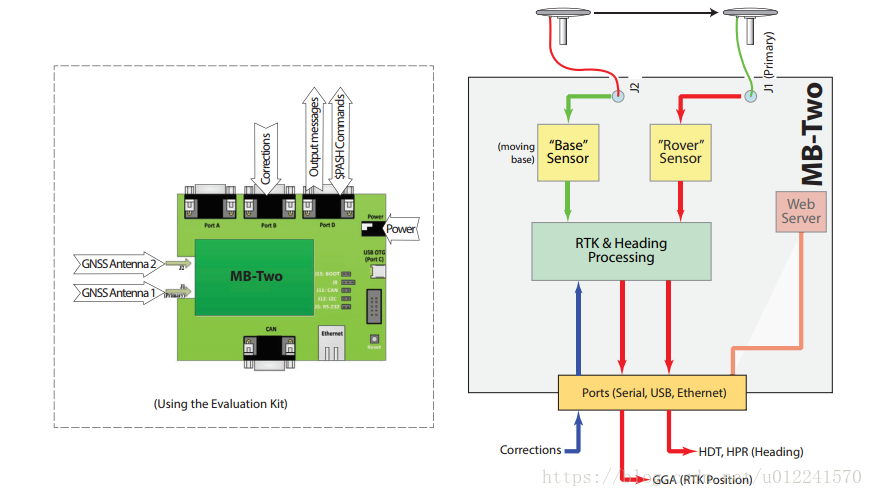
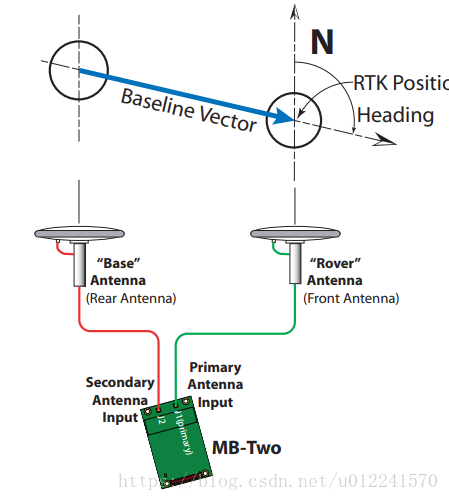
•MB-Two需要使用两个内部传感器来计算航向。 这就是我们所说的在DUO模式下操作电路板1。 运行此命令以激活DUO模式:
$ PASHS,SNS,DUO
重要! 运行此命令后,电路板处于新的运行状态,就像您运行了以下命令一样:
$ PASHS,2,BLN,ON,2,1
$ PASHS,1,BLN,ON,?
$ PASHS,3,BLN,SAM
$ PASHS,3DF,ON,2
$ PASHS,RTK,ON,1,3-
$ PASHS,BRV,OFF
在确认命令后,自动校准将自动启动(除非您稍后使用$ PASHS,3DF,V12 ..输入基线的矢量分量)。
•如果您准确知道基线矢量的组件(例如:x12 = 0.87 m)并且您想立即输入它们,请使用以下命令:
$PASHS,3DF,V12,0.87
(这将停止正在进行的自动校准。)
•相反,您可能会认为基线矢量的模块可能会随着时间的推移略有变化,并希望电路板在这种情况下继续计算航向,即
无需重新校准。 对于此类应用程序,如果使用的基线是基线#1,则运行此命令:
$ PASHS,3DF,ON,1,FLX
•您可以使用以下命令检查当前的M传感器状态和接收器状态:
$ PASHQ,SNS
•在任何端口上设置所需的输出消息。 这些可能是以下之一:
在D口以10赫兹为标题:
$ PASHS,NME,HDT,D,ON,0.1
端口D上的10 Hz矢量:
$ PASHS,NME,VCT,D,ON,0.1
端口D上的标题+俯仰/滚动
$ PASHS,NME,HPR,D,ON,0.1
端口D(NMEA)上1 Hz的天线#1位置(独立):
$ PASHS,NME,GGA,D,ON,1
端口D(ATOM)上1 Hz的天线#1位置(独立):
$ PASHS,ATM,PVT,D,ON,1,&COO,ERR,LCY
相同的消息类型,但与天线#2位置相关:在$ PASHS标题后插入“,2”:
$ PASHS,2,NME,...
$ PASHS,2,ATM,...
注意:当在同一端口上为两个不同的位置(即天线#1和天线#2)输出相同类型的消息时,在消息流中插入特殊标记,以便接收方设备可以识别哪些消息描述了哪些天线。
GGA消息示例:
$ PASHD,#1,123456.00,ABCD,BEG* CC<CR> <LF>
$ GPGGA,...
$ PASHD,#1,123456.00,ABCD,END* cc的<CR> <LF>
$ PASHD,#2,123456.00,ABCD,BEG* CC<CR> <LF>
$ GPGGA,...
$ PASHD,#2,123456.00,ABCD,END* cc的<CR> <LF>
每个GGA消息都插入在开始(BEG)和结束(BEG)标记之间(在上面的示例中以粗体字符显示)。 标记头指示紧接着的GGA消息所指的天线(或传感器)。
例如,在两个“$ PASHD,#1,...”行之间插入的GGA消息表示该消息是关于天线#1的。
如果您只是希望MB-Two计算内部航向(而不是天线#1的RTK位置),则无需更改任何配置的电路板,只需断开电路板上的输入校正流即可。
Rover Computing Hot Standby RTK Position
Rover Computing Attitude
这需要安装固件选项[E](Attitude)
董事会计算态度(董事会#2)。
•启动与#1板的双向通信
通过使用菊花链命令的#2板:
$ PASHS,DSY,B,D
$ PASHS,DSY,D,B
•配置板#1:
启用第二个天线:
$ PASHS,SNS,DUO
禁用三个基线引擎:
$ PASHS,1,BLN,OFF
$ PASHS,2,BLN,OFF
$ PASHS,3,BLN,OFF
禁用RTK:
$ PASHS,RTK,OFF
禁用姿态和航向:
$ PASHS,3DF,OFF
请求生成与之相关的10-Hz校正流(移动基数)
B口的天线#1(板#2); 必须使用ATOM格式:
$ PASHS,ATM,RNX,B,ON,0.1%,和SCN,204
启用输出消息传送天线#1参数:
$ PASHS,ATM,ATR,B,ON
请求生成与之相关的10-Hz校正流(移动基数)B端的天线#2(板#2); 必须使用ATOM格式:
$ PASHS,2,ATM,RNX,B,ON,0.1%,和SCN,204
启用输出消息传送天线#2参数:
$ PASHS,2,ATM,ATR,B,ON
•配置板#2:
将电路板设置为SOLO模式:
$ PASHS,SNS,SOL
禁用与#2板的通信,恢复与之通信
第1板:
$ PASHS,DSY,OFF
禁用第一个基线引擎:
$ PASHS,1,BLN,OFF
将第二个基线引擎设置为使用来自#2板,天线#1(后置天线)的校正流,通过板#1的端口B:
$ PASHS,2,BLN,ON,B1
设置第三个基线引擎以使用来自#2板的更正流,
天线#2(侧面天线),通过板#1的端口B:
$ PASHS,3,BLN,ON,B2
禁用RTK:
$ PASHS,RTK,OFF
启用态度计算,指定处理哪些基线:
$ PASHS,3DF,ON,2,3
输入第一个矢量的坐标(将停止正在进行的自动校准):
$ PASHS,3DF,V12,X12,Y12,Z12
(V12指从前天线到后天线的基线)
输入第二个矢量的坐标(将停止自动校准进展):
$ PASHS,3DF,V13,X13,Y13,Z13
(V13指从前天线到侧天线的基线)
•在#2上编程输出消息(航向,姿态):
在端口D上启用10 Hz的航向信息:
$ PASHS,NME,HDT,D,ON,0.1
在端口D上启用10 Hz的矢量消息:
$ PASHS,NME,HPR,D,ON,0.1
•您可以在任何端口上定义其他消息。 见下面例子:
在端口D上以1 Hz的位置定位:
$ PASHS,NME,GGA,D,ON,1
端口D上的卫星状态消息:
$ PASHS,NME,GSV,D,ON
端口D上的1 Hz位置精度消息:
$ PASHS,NME,GST,D,ON,1
端口D上1 Hz的速度:
$ PASHS,NME,VTG,D,ON,1
端口D上的传感器延迟为1 Hz:
$ PASHS,NME,LTN,D,ON,1
以二进制格式(ATOM)在端口D上以1 Hz的频率定位数据(独立):
$ PASHS,ATM,PVT,D,ON,1,&COO,ERR,LCY
注意:此配置中计算的俯仰和滚动是相对值。 报告的0度俯仰或滚动意味着自校准系统后角度未发生变化。 这并不意味着三个天线都在同一水平面上。
例如,您可以设置两个天线的俯仰或滚动偏移为15°的设置。 校准过程假定这是天线设置的待机位置。
校准后,只要没有检测到姿态变化,滚动或俯仰将保持为零。
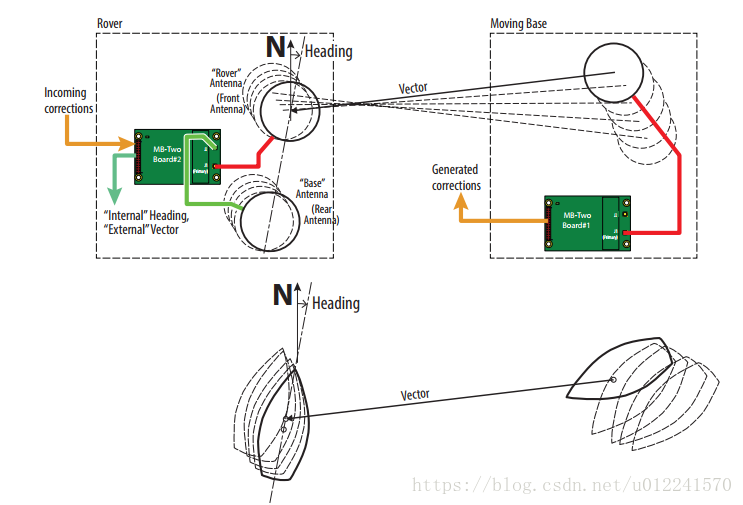
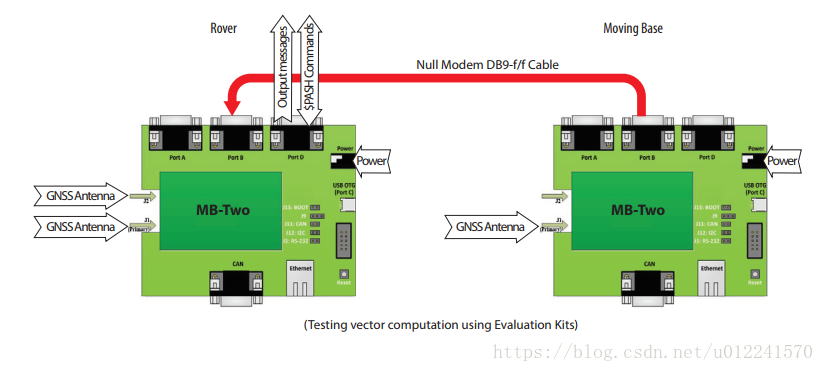
流动站计算矢量(相对定位)
相对定位包括计算两个移动车辆之间的变化矢量。 需要知道矢量分量的车辆是漫游车,另一个是移动基座。
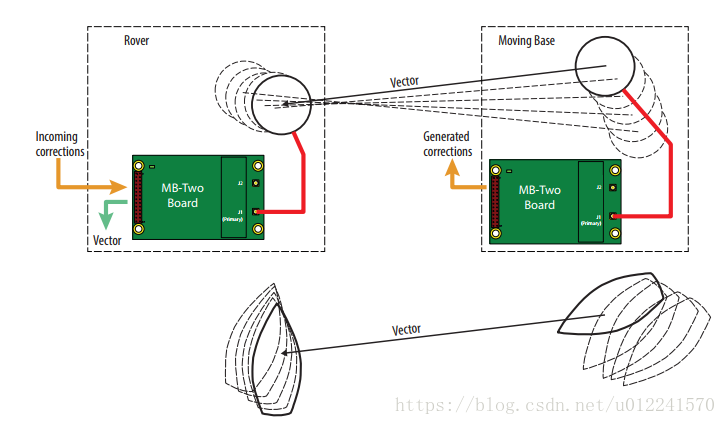
注意:通过适当的端口使用专用传输通道(无线电,网络,其他)将基本校正传输到流动站。
要使用两个评估套件测试此应用程序,请使用零调制解调器电缆将两个B端口连接在一起。

移动基本配置
See Moving Base on page 58.
流动站配置
如果您使用以下命令设置流动站板(例如通过其端口D),是否已在SOLO或DUO模式下设置电路板无关紧要:
•设置专用于处理向量的基线:
$ PASHS,1,BLN,ON,B,1
•停用其他两个基线:
$ PASHS,2,BLN,OFF
$ PASHS,3,BLN,OFF
•禁用RTK位置处理:
$ PASHS,RTK,OFF
•禁用姿态处理:
$ PASHS,3DF,OFF
•启用基线#1上的矢量处理:
$ PASHS,BRV,ON,1
•编程将提供计算向量的输出消息,例如在端口A上以0.2s的频率输出:
$ PASHS,NME,VCR,A,ON,0.2
在上面的流动站配置中,校正通过端口B路由,因为所描述的示例基于并排使用的两个评估工具包。
在实际应用中,两块板将在不同的位置运行,因此您应该定义另一种传输校正的方式,例如通过调制解调器或无线电。
因此,在移动基础上,您应该生成到连接到发送设备的端口的更正消息,例如端口I:
观察和运动位置:
$PASHS,ATM,RNX,I,ON,1,&SCN,204
接收器和天线名称,其他属性:
$PASHS,ATM,ATR,I,ON
在流动站上,应定义第一个基线以使用来自连接到接收设备的端口的更正,例如端口C:
$PASHS,1,BLN,ON,C
知道你总能让板卡找到接收端口的端口使用“?”符号而不是端口ID进行更正。
流动计算内部航向和外部矢量
您可以将第38页上的流动站计算内部航向+ RTK位置和第46页上的流动站计算向量(相对定位)中描述的两个应用程序组合在一起。但是,在此情况下,不能为流动站位置提供RTK位置。
注意:通过适当的端口使用专用传输通道(无线电,网络,其他)将基本校正传输到流动站。
要使用两个评估套件测试此应用程序,请使用零调制解调器电缆将两个B端口连接在一起。
•将电路板#1配置为移动基站:
$PASHS,SNS,SOL
$PASHS,STI,<Base ID>
$PASHS,ATM,RNX,B,ON,1,&SCN,204
$PASHS,ATM,ATR,B,ON,1
有关更多详细信息,请参阅第58页的移动基座。
•按如下方式配置板#2:
$PASHS,SNS,DUO
$PASHS,3DF,V12,<baseline length>
$PASHS,NME,HDT,D,ON,<output rate>
$PASHS,NME,HPR,D,ON,<output rate>
有关更多详细信息,请参阅Rover Computing Internal第38页的航向+ RTK位置。
•执行以下附加步骤以完成设置:
重新定义基线#3如下(假设外部移动基座的校正通过端口B进入电路板):
$PASHS,3,BLN,ON,B
启用基线#3上的相对模式(由基线引擎#3计算的向量):
$PASHS,BRV,ON,3
禁用RTK位置处理:
$PASHS,RTK,OFF
编程将提供计算向量的输出消息,例如在0.5秒的端口A上:
$PASHS,NME,VCR,A,ON,0.5
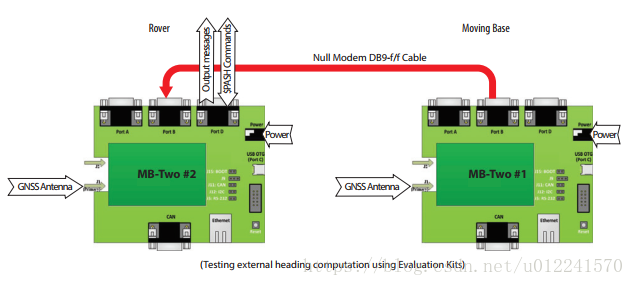
移动站计算外部航向
提供外部航向测量的电路板应配备固件选项[J](或[F])和[E]。另一个配置为移动基座的MB-Two板将提供所需的连接。
注意:通过适当的端口使用专用传输通道(无线电,网络,其他)将基本校正传输到流动站。 必须以ATM,RNX格式生成更正。
要使用两个评估套件测试此应用程序,请使用零调制解调器电缆将两个B端口连接在一起。
•将电路板#1配置为移动基站:
$PASHS,SNS,SOL
$PASHS,STI,<Base ID>
$PASHS,ATM,RNX,B,ON,1,&SCN,204
$PASHS,ATM,ATR,B,ON,1
有关更多详细信息,请参阅第58页的移动基座。
•将电路板#2配置为流动站计算航向,使用来自外部移动基站的校正:
$PASHS,SNS,SOL
重要! 运行此命令后,电路板处于新的运行状态,就像您运行了以下命令一样:
$PASHS,1,BLN,ON,?
$PASHS,2,BLN,SAM
$PASHS,3,BLN,SAM
$PASHS,3DF,OFF
$PASHS,RTK,ON,1,2,3
$PASHS,BRV,OFF
禁用所有基线上的RTK处理:
$PASHS, RTK,OFF
然后定义在基线#1中处理的基准和流动站数据(假设移动基础数据通过端口B进入板):
$PASHS, 1,BLN,ON,B1,1
然后在基线#1上启用航向处理,指定Flex模式,让电路板计算航向,而无需经过校准步骤:
$PASHS,3DF,ON,1,FLX
然后定义所需的输出消息:
$PASHS,NME,HDT,D,ON,<output rate>
or/and
$PASHS,NME,HPR,D,ON,<output rate>
流动站计算两个独立的RTK位置(双RTK)
双RTK允许电路板使用相同的校正源提供两个RTK位置,每个位置对应一个天线。
MB-Two必须使用两个内部传感器,每个天线一个:
$PASHS,SNS,DUO
重要! 运行此命令后,电路板处于新的运行状态,就像您运行了以下命令一样:
$PASHS,2,BLN,ON,2,1
$PASHS,1,BLN,ON,?
$PASHS,3,BLN,SAM
$PASHS,3DF,ON,2
$PASHS,RTK,ON,1,3 (RTK position processing running on baselines 1 & 3)
$PASHS,BRV,OFF (vector processing turned off)
假设您将使用基线#1和#3,请禁用基线#2:
$PASHS,2,BLN,OFF
定义基线#3,使用传感器#2(即辅助天线),并使用任何传入的校正来计算RTK位置:
$PASHS,3,BLN,ON,?,2
•关闭姿态处理:$ PASHS,3DF,OFF
设置将提供RTK位置的输出消息(通常为GGA):
Antenna #1 at 2 Hz on port D:
$PASHS,1,NME,GGA,D,ON,0.5
Antenna #2 at 2 Hz on port D:
$PASHS,2,NME,GGA,D,ON,0.5
注意:当在同一端口上为两个不同的位置(即天线#1和天线#2)输出相同类型的消息时,在消息流中插入特殊标记,以便接收方设备可以识别哪些消息描述了哪些天线。
Example with GGA messages:
$PASHD,#1,123456.00,ABCD,BEG*cc<cr><lf>
$GPGGA,…
$PASHD,#1,123456.00,ABCD,END*cc<cr><lf>
$PASHD,#2,123456.00,ABCD,BEG*cc<cr><lf>
$GPGGA,…
$PASHD,#2,123456.00,ABCD,END*cc<cr><lf>
每个GGA消息都插入在开始(BEG)和结束(BEG)标记之间(在上面的示例中以粗体字符显示)。 标记头指示紧接着的GGA消息所指的天线(或传感器)。
例如,在两个“$ PASHD,#1,...”行之间插入的GGA消息表示该消息是关于天线#1的。
Rover提供两个外部向量(双相对RTK)
双相对RTK允许电路板使用相同的校正源为每个天线提供两个矢量。
Rover Computing RTX Position
请参阅第65页的Trimble RTX校正服务章节。
基站配置
静态基站

将电路板通过其端口D设置为静态基站:
•除非已完成,否则将电路板设置为SOLO模式:
$PASHS,SNS,SOL
•输入基准位置。 例:
$PASHS,POS,5542.00140500,N,03733.71603633,E,205.6450,PC1
•输入天线名称。 例:
$PASHS,ANP,OWN,TRM55971.00
•输入基本ID。 例:
$PASHS,STI,0001
•要求板卡生成差分信息。 在不同的类型中,RTCM-3.2(MSM)和ATOM是最重要的。
如果您想为第三方流动站提供服务,建议使用RTCM-3.2(MSM)格式。 例如,假设使用的输出端口为B且输出速率为1秒(1033除外),请设置以下消息:
GPS观测:
$PASHS,RT3,1074,B,ON,1
GLONASS观测:
$PASHS,RT3,1084,B,ON,1
Galileo观测:
$PASHS,RT3,1094,B,ON,1
QZSS观测
$PASHS,RT3,1114,B,ON,1
BDS观测
$PASHS,RT3,1124,B,ON,1
静态位置:
$PASHS,RT3,1006,B,ON,1
天线和接收器名称:
$PASHS,RT3,1033,B,ON,31
系统参数:
$PASHS,RT3,1013,B,ON,1
ASCII消息:
$PASHS,RT3,1029,B,ON,1
GLONASS码相位偏差:
$PASHS,RT3,1230,B,ON
如果你想为你自己的流动站生成差分,那么建议使用标准ATOM格式。
例如,设置以下消息,仍假设使用的输出端口为B且输出速率为1秒:
Observations and static position:
$PASHS,ATM,RNX,B,ON,1,&SCN,4
Receiver and antenna names, other attributes:
$PASHS,ATM,ATR,B,ON,1
移动基地

•除非已完成,否则将电路板设置为SOLO模式:
$ PASHS,SNS,SOL
•输入基本ID。 例:
$ PASHS,STI,0001
•如果要为自己的流动站生成校正,建议使用标准ATOM格式。 例如,设置以下消息,仍假设使用的输出端口为B且输出速率为1秒:
观察和运动位置:
$ PASHS,ATM,RNX,B,ON,1,&SCN,204
接收器和天线名称,其他属性:
$ PASHS,ATM,ATR,B,ON,1
原始数据记录
In SOLO Mode
原始数据记录可以使用标准RTCM3.2或专有ATOM格式进行。
在下面给出的所有消息示例中,s1表示端口ID,f2表示观察间隔。
RTCM3.2:
$PASHS,RT3,1077,s1,ON,f2
$PASHS,RT3,1087,s1,ON,f2
$PASHS,RT3,1097,s1,ON,f2
$PASHS,RT3,1117,s1,ON,f2
$PASHS,RT3,1127,s1,ON,f2
$PASHS,RT3,1006,s1,ON
$PASHS,RT3,1033,s1,ON
$PASHS,RT3,1013,s1,ON
$PASHS,RT3,1029,s1,ON
$PASHS,RT3,1230,s1,ON
GPS ephemeris:
$PASHS,RT3,1019,s1,ON
GLONASS ephemeris:
$PASHS,RT3,1020,s1,ON
QZSS ephemeris:
$PASHS,RT3,1044,s1,ON
Galileo ephemeris:
$PASHS,RT3,1045,s1,ON
ATOM:
Full observations:
$PASHS,ATM,RNX,s1,ON,f2
Ephemeris, almanac, iono data:
$PASHS,ATM,NAV,s1,ON
Receiver, antenna names, etc.:
$PASHS,ATM,ATR,s1,ON
In DUO Mode
您可以使用RTCM3-2或ATOM格式单独记录每个传感器/天线的原始数据,如SOLO模式中所述。 原始数据可以在两个不同的端口上路由,每个传感器一个或同一端口。 在后一种情况下,使用ATOM格式更方便。
Full observations from primary sensor:
$PASHS,ATM,RNX,s1,ON,f2
Full observations from secondary sensor:
$PASHS,2,ATM,RNX,s1,ON,f2
Ephemeris, almanac, iono data:
$PASHS,ATM,NAV,s1,ON
Receiver and antenna names and other attributes:
$PASHS,ATM,ATR,s1,ON
向板卡添加启动保护
您可以设置电路板,使其只能由授权用户运行。 这种保护称为“启动保护”。
通过此保护,您可以阻止任何人使用该板,直到提供正确的密码。 输入密码以删除启动保护后,电路板将从“锁定”状态切换到“解锁”状态。
设置启动保护
启动保护的实现依赖于使用以下命令:
$ PASHS,ATH,PWD
$ PASHS,LCK,MOD
$ PASHS,LCK,ON
$ PASHQ,LCK