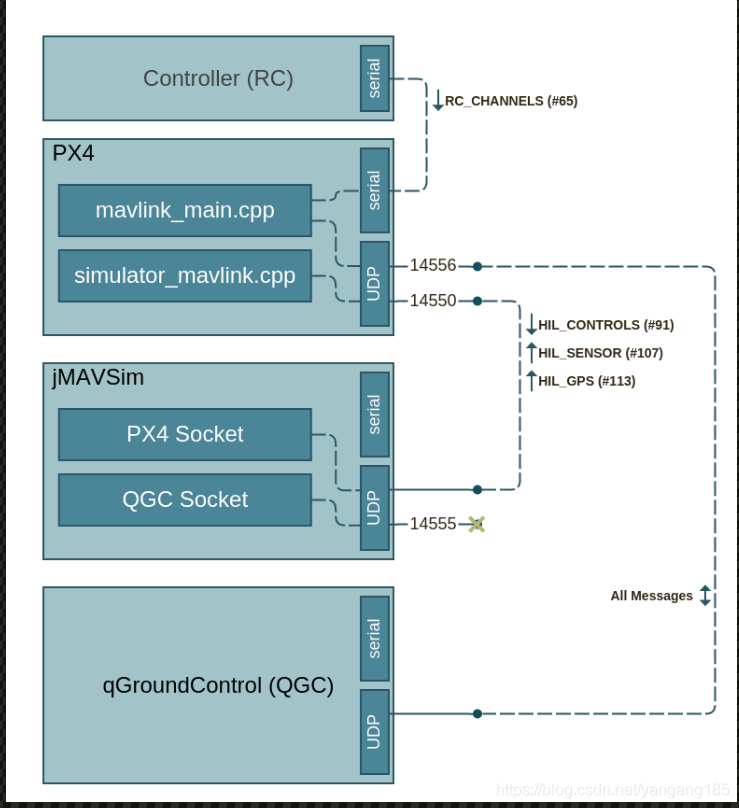
px4仿真架构
编译执行
编译
切换到1.8.0版本,编译posix_sitl_test,生成px4可执行文件
1. git check tag_v1.8.0
2. make posix_sitl_test
3. build/posix_sitl_test
分析px4可执行文件中编译了那些模块
- 通过px4的elf分析代码中有那些模块,同时知道了main的入口,readelf -s xxx表示读取可执行文件的代码段
yangang@yangang-ubuntu:~/work/px4_proj/Firmware/build/posix_sitl_test$ readelf -s px4 |grep -n "main.cpp"
1465: 44: 0000000000000000 0 FILE LOCAL DEFAULT ABS replay_main.cpp
1474: 53: 0000000000000000 0 FILE LOCAL DEFAULT ABS main.cpp
1573: 152: 0000000000000000 0 FILE LOCAL DEFAULT ABS land_detector_main.cpp
1584: 163: 0000000000000000 0 FILE LOCAL DEFAULT ABS navigator_main.cpp
1585: 164: 0000000000000000 0 FILE LOCAL DEFAULT ABS ekf2_main.cpp
1588: 167: 0000000000000000 0 FILE LOCAL DEFAULT ABS wind_estimator_main.cpp
1594: 173: 0000000000000000 0 FILE LOCAL DEFAULT ABS mc_att_control_main.cpp
1640: 219: 0000000000000000 0 FILE LOCAL DEFAULT ABS MS5525_main.cpp
1644: 223: 0000000000000000 0 FILE LOCAL DEFAULT ABS SDP3X_main.cpp
1770: 349: 0000000000000000 0 FILE LOCAL DEFAULT ABS controllib_test_main.cpp
1782: 361: 0000000000000000 0 FILE LOCAL DEFAULT ABS mc_pos_control_main.cpp
1786: 365: 0000000000000000 0 FILE LOCAL DEFAULT ABS uORB_tests_main.cpp
1836: 415: 0000000000000000 0 FILE LOCAL DEFAULT ABS hello_main.cpp
1838: 417: 0000000000000000 0 FILE LOCAL DEFAULT ABS hrt_test_main.cpp
1840: 419: 0000000000000000 0 FILE LOCAL DEFAULT ABS muorb_test_main.cpp
1842: 421: 0000000000000000 0 FILE LOCAL DEFAULT ABS vcdevtest_main.cpp
1886: 465: 0000000000000000 0 FILE LOCAL DEFAULT ABS mavlink_main.cpp
2007: 586: 0000000000000000 0 FILE LOCAL DEFAULT ABS vtol_att_control_main.cpp
2098: 677: 0000000000000000 0 FILE LOCAL DEFAULT ABS main.cpp
- 启动px4,看到了需要我们制定启动脚本,"startup_config"是需要指定的启动脚本文件
yangang@yangang-ubuntu:~/work/px4_proj/Firmware/build/posix_sitl_test$ ./px4
ERROR [Unknown] Error expected 1 or 2 position arguments, got 0
./px4 [-d] [data_directory] startup_config [-h]
-d - Optional flag to run the app in daemon mode and does not listen for user input.
This is needed if px4 is intended to be run as a upstart job on linux
<data_directory> - directory where ROMFS and posix-configs are located (if not given, CWD is used)
<startup_config> - config file for starting/stopping px4 modules
-h - help/usage information
Restoring terminal
- 我们先用px4的shell/iris的脚本, 发现已经正常跑了起来
yangang@yangang-ubuntu:~/work/px4_proj/Firmware/build/posix_sitl_test$ ./px4 ../../posix-configs/SITL/init/shell/iris
commands file: ../../posix-configs/SITL/init/shell/iris
58 WARNING: setRealtimeSched failed (not run as root?)
______ __ __ ___
| ___ \ \ \ / / / |
| |_/ / \ V / / /| |
| __/ / \ / /_| |
| | / /^\ \ \___ |
\_| \/ \/ |_/
px4 starting.
pxh>
启动qgroundstation
- 启动qgroundstation
yangang@yangang-ubuntu:~/work/github_proj/fight$ ./QGroundControl.AppImage
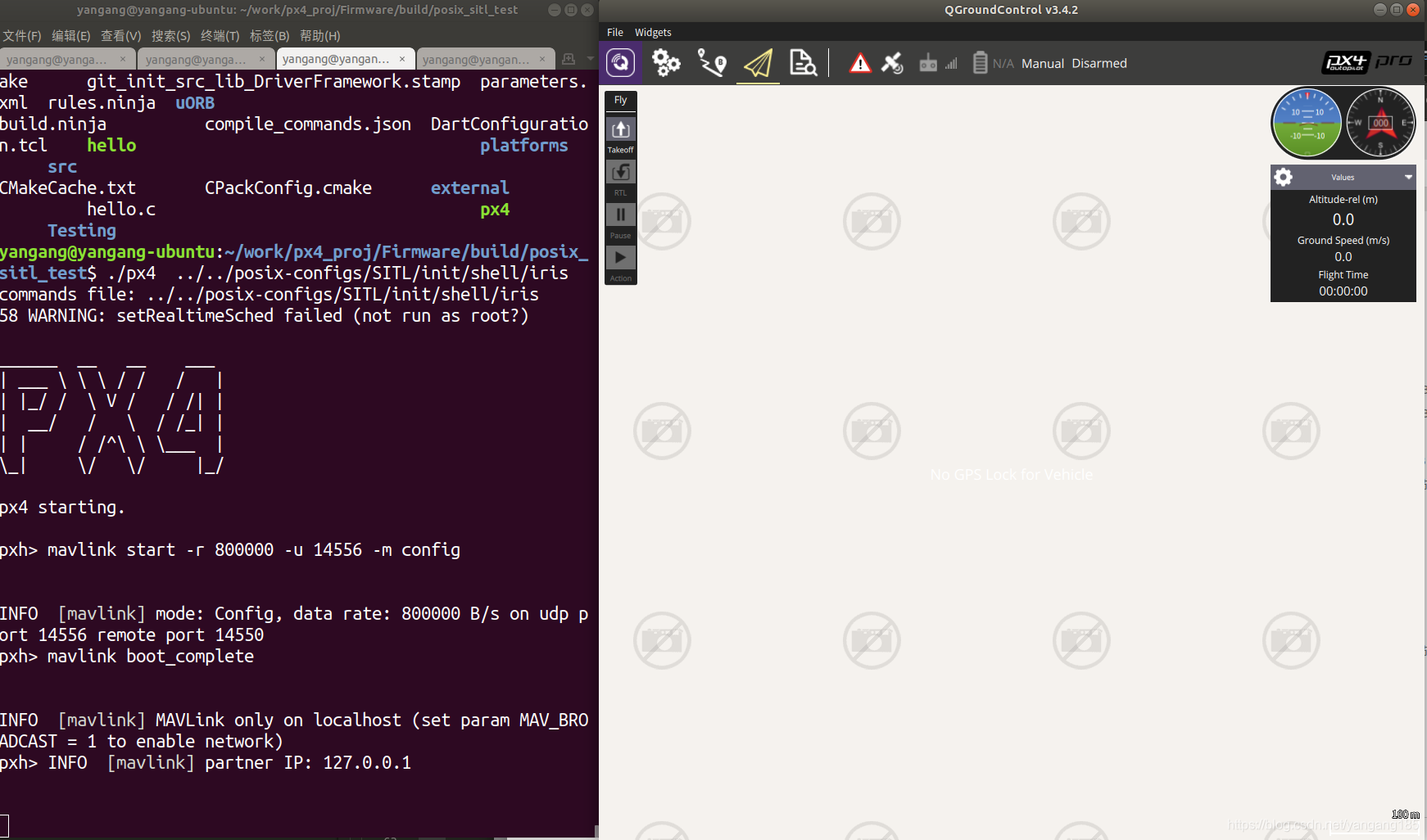
- 在px4中启动mavlink,连接飞控, 发现飞机已经连接上了
pxh> mavlink start -r 800000 -u 14556 -m config
INFO [mavlink] mode: Config, data rate: 800000 B/s on udp port 14556 remote port 14550
pxh> mavlink boot_complete
INFO [mavlink] MAVLink only on localhost (set param MAV_BROADCAST = 1 to enable network)
pxh> INFO [mavlink] partner IP: 127.0.0.1
- 查看px4占用的线程有那些
yangang@yangang-ubuntu:/proc$ ps -ef |grep "px4"
yangang 30631 22252 0 18:32 pts/1 00:00:01 ./px4 ../../posix-configs/SITL/init/shell/iris
yangang@yangang-ubuntu:/proc/30631$ ls
yangang@yangang-ubuntu:/proc/30631$ cd task/
yangang@yangang-ubuntu:/proc/30631/task$ ls
30631 30632 30634 30636 30638 30640 31297 31298
yangang@yangang-ubuntu:/proc/30631/task$ ps -T -p 30631
PID SPID TTY TIME CMD
30631 30631 pts/1 00:00:00 px4
30631 30632 pts/1 00:00:00 DFWorker
30631 30634 pts/1 00:00:00 hpwork
30631 30636 pts/1 00:00:00 lpwork
30631 30638 pts/1 00:00:00 wkr_hrt
30631 30640 pts/1 00:00:00 dataman
30631 31297 pts/1 00:00:01 mavlink_if0
30631 31298 pts/1 00:00:00 mavlink_rcv_if0
仿真效果