版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/sinat_39286218/article/details/80457583
问题描述:
用PSO优化多目标约束问题
文件目录:
PSO.m
ObjectiveFunction.m
DrawLandscape.m
PSO.m
clear all
close all
clc
%define the details of this problem
nVar = 2;
ub = [10 10];
lb = [-10 -10];
fobj = @ObjectiveFunction;
%define the PSO's parameters
noP = 30;
maxIter = 500;
wMax = 0.9;
wMin = 0.2;
c1 = 2;
c2 = 2;
vMax = (ub-lb) .* 0.2;
vMin = -vMax;
%initialise the particles
for k = 1 : noP
Swarm.Particles(k).X = (ub-lb) .* rand(1,nVar) + lb;
Swarm.Particles(k).V = zeros(1,nVar);
Swarm.Particles(k).PBEST.X = zeros(1,nVar);
Swarm.Particles(k).PBEST.O = inf;
Swarm.GBEST.X = zeros(1,nVar);
Swarm.GBEST.O = inf;
end
%main loop
for t = 1 : maxIter
%calculate the objective value
for k= 1 : noP
currentX = Swarm.Particles(k).X;
Swarm.Particles(k).O = fobj(currentX);
if Swarm.Particles(k).O < Swarm.Particles(k).PBEST.O %update the PBEST
Swarm.Particles(k).PBEST.X = currentX;
Swarm.Particles(k).PBEST.O = Swarm.Particles(k).O;
end
if Swarm.Particles(k).O < Swarm.GBEST.O %update the GBEST
Swarm.GBEST.X = currentX;
Swarm.GBEST.O = Swarm.Particles(k).O;
end
end
%update the X and V vectors
w = wMax - t .* ((wMax-wMin)/maxIter);
for k = 1 : noP
Swarm.Particles(k).V = w .* Swarm.Particles(k).V + c1 .* rand(1,nVar) .* (Swarm.Particles(k).PBEST.X-Swarm.Particles(k).X)...
+ c2 .* rand(1,nVar) .* (Swarm.GBEST.X-Swarm.Particles(k).X);
index1 = find(Swarm.Particles(k).V > vMax); %check velocities
index2 = find(Swarm.Particles(k).V < vMin);
Swarm.Particles(k).V(index1) = vMax(index1);
Swarm.Particles(k).V(index2) = vMin(index2);
Swarm.Particles(k).X = Swarm.Particles(k).X + Swarm.Particles(k).V;
index1 = find(Swarm.Particles(k).X > ub); %check positions
index2 = find(Swarm.Particles(k).V < lb);
Swarm.Particles(k).X(index1) = ub(index1);
Swarm.Particles(k).X(index2) = lb(index2);
end
outmsg = ['Iteration#' , num2str(t) , 'Swarm.GBEST.O = ' , num2str(Swarm.GBEST.O)];
disp(outmsg);
cgCurve(t) = Swarm.GBEST.O;
end
semilogy(cgCurve);ObjectiveFunction.m
function[o] = ObjectiveFunction(x)
%List of your constraints
const1 = x(2) <= 3.2 || x(2) >= 6.4;
const2 = (x(1)^2 + x(2)^2) >= 1;
const3 = x(1) ~= x(2);
if const1 == 1 && const2 == 1 && const3 == 1
o = sum(x.^2);
else
o = sum(x.^2) + 200;
end
endDrawLandscape.m
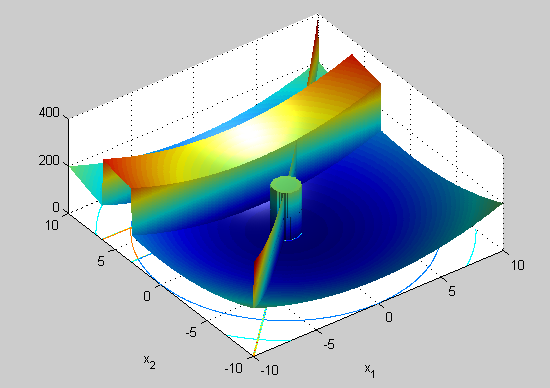
%Visualise the landscape
fobj = @ObjectiveFunction
x = -10 : 0.05 : 10;
y = -10 : 0.05 : 10;
[x_new , y_new] = meshgrid(x,y); %生成绘制3D图形所需的网格数据
for i = 1 : size(x_new , 1)
for j =1 : size(x_new , 2)
currentX = [ x_new(i,j), y_new(i,j) ];
o(i,j) = fobj(currentX);
end
end
surfc(x_new , y_new , o)
shading interp
camlight
xlabel('x_1')
ylabel('x_2')结果:
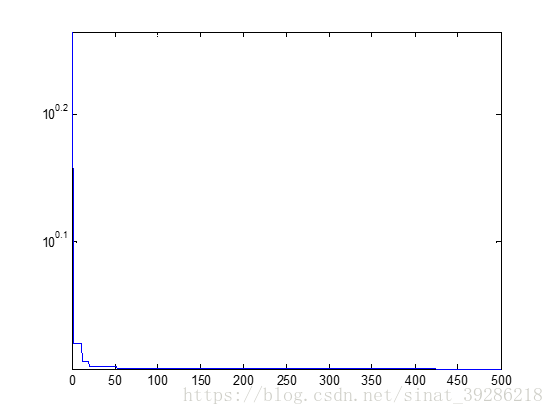
Iteration#491Swarm.GBEST.O = 1
Iteration#492Swarm.GBEST.O = 1
Iteration#493Swarm.GBEST.O = 1
Iteration#494Swarm.GBEST.O = 1
Iteration#495Swarm.GBEST.O = 1
Iteration#496Swarm.GBEST.O = 1
Iteration#497Swarm.GBEST.O = 1
Iteration#498Swarm.GBEST.O = 1
Iteration#499Swarm.GBEST.O = 1
Iteration#500Swarm.GBEST.O = 1
>> Swarm.GBEST.X
ans =
0.8900 -0.4559对结果分析:
有 landscape 及 const2 = (x1^2+x2^2) >=1 , Swarm.GBEST.O = 1 且 Swarm.GBEST.X 的 x1^2+x2^2 接近 1,故此优化结果可靠准确
心得:
1. 对目标约束问题的求解,PSO.m部分与TableDesignProblem的PSO.m部分几乎一致;
2. 多目标优化的代码部分体现在ObjectiveFunction的设计中,引入惩罚函数;
3. meshgrid();%生成绘制3D图形所需的网格数据,并对网格点采样,在三维图形中画出目标函数的landscape