三. 基于统计分析的StatisticalOutlierRemoval滤波器
该滤波器主要用于移除离群点,那么什么样的点是离群点呢?计算点云中每个点与其所有临近点的平均距离,并假设其结果为一形状由均值和标准差决定的高斯分布,若有某点平均距离在标准范围(由全局距离平均值和方差定义)之外,则定义为离群点,并将其从数据集中去除掉,这也是本滤波器的内在处理逻辑,即对每个点的邻域进行一个统计分析。
激光扫描通常会产生密度不均匀的点云数据,另外,测量中的误差也会产生稀疏的离群点。
代码如下
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/filters/statistical_outlier_removal.h>
int
main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PCDReader reader; // 定义读取对象
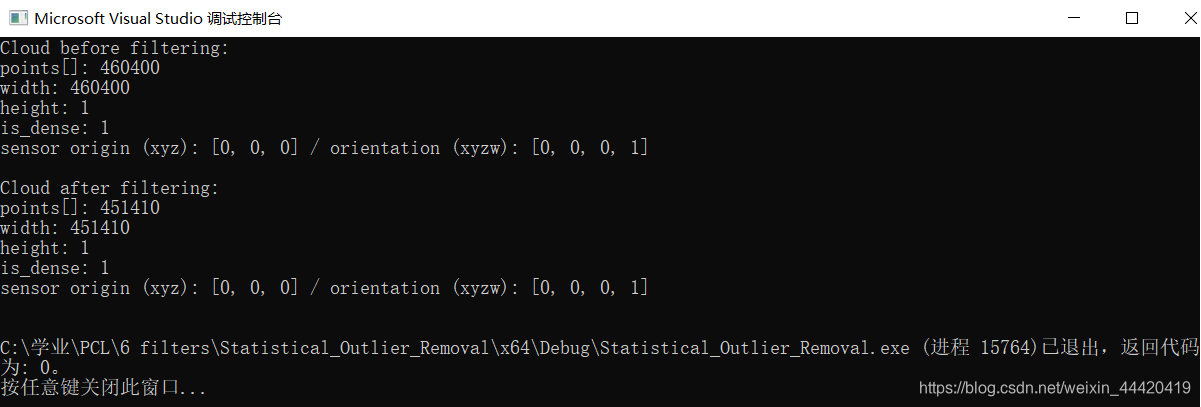
reader.read<pcl::PointXYZ>("table_scene_lms400.pcd", *cloud); // 读取点云文件
std::cerr << "Cloud before filtering: " << std::endl;
std::cerr << *cloud << std::endl;
/*创建滤波器,对每个点分析的临近点的个数设置为50 ,并将标准差的倍数设置为1 这意味着如果一
个点的距离超出了平均距离一个标准差以上,则该点被标记为离群点,并将它移除,存储起来*/
pcl::StatisticalOutlierRemoval<pcl::PointXYZ> sor; //创建滤波器对象
sor.setInputCloud(cloud); //设置待滤波的点云
sor.setMeanK(50); //设置在进行统计时考虑查询点临近点数
sor.setStddevMulThresh(1.0); //设置判断是否为离群点的阀值
sor.filter(*cloud_filtered); //执行滤波处理保存内点到在cloud_filtered
//打印滤波后的数据
std::cerr << "Cloud after filtering: " << std::endl;
std::cerr << *cloud_filtered << std::endl;
//将过滤后得到的剩余内部点存入磁盘
pcl::PCDWriter writer;
writer.write<pcl::PointXYZ>("table_scene_lms400_inliers.pcd", *cloud_filtered, false);
//使用同样的参数再次调用该滤波器,但是利用函数setNegative设置使输出取外点,以获取离群点,并存储
sor.setNegative(true);
sor.filter(*cloud_filtered);
writer.write<pcl::PointXYZ>("table_scene_lms400_outliers.pcd", *cloud_filtered, false);
return (0);
}
运行结果如下:
运行程序后会在同名文件目录下得到两个点云文件,分别存储内点和外点,之后可作可视化处理。
注:可能在运行程序时报错 难受啊
“错误 C3861 “pop_t”: 找不到标识符 ”
此时,修改打开的dist.h文件(不可以修改的话用管理员身份打开VS修改),将503行的
“typedef unsigned long long pop_t;”
移到上面几行的“#if GNUC”前面就可以了,具体原理没懂,参见https://github.com/mariusmuja/flann/issues/386
四. 使用ProjectInliers滤波器在参数化模型中投影点云
通过此滤波器将点投影到一个参数化模型上(平面或者球体等)。参数化模型通过一组参数来设定,对于平面来说使用其等式形式 ax + by + cz + d + 0,在PCL中有特意存储常见模型系数的数据结构。
代码如下:
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/ModelCoefficients.h> //模型系数头文件
#include <pcl/filters/project_inliers.h> //投影滤波类头文件
int
main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_projected(new pcl::PointCloud<pcl::PointXYZ>);
//创建点云并打印出来
cloud->width = 5;
cloud->height = 1;
cloud->points.resize(cloud->width * cloud->height);
for (size_t i = 0; i < cloud->points.size(); ++i)
{
cloud->points[i].x = 1024 * rand() / (RAND_MAX + 1.0f);
cloud->points[i].y = 1024 * rand() / (RAND_MAX + 1.0f);
cloud->points[i].z = 1024 * rand() / (RAND_MAX + 1.0f);
}
std::cerr << "Cloud before projection: " << std::endl;
for (size_t i = 0; i < cloud->points.size(); ++i)
std::cerr << " " << cloud->points[i].x << " "
<< cloud->points[i].y << " "
<< cloud->points[i].z << std::endl;
/* 填充ModelCoefficients的值,使用ax+by+cz+d=0平面模型,其中 a=b=d=0,c=1 也就是X—Y平面
定义模型系数对象,并填充对应的数据*/
pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients());
coefficients->values.resize(4);
coefficients->values[0] = coefficients->values[1] = 0;
coefficients->values[2] = 1.0;
coefficients->values[3] = 0;
// 创建ProjectInliers对象,使用ModelCoefficients作为投影对象的模型参数
pcl::ProjectInliers<pcl::PointXYZ> proj; //创建投影滤波对象
proj.setModelType(pcl::SACMODEL_PLANE); //设置对象对应的投影模型
proj.setInputCloud(cloud); //设置输入点云
proj.setModelCoefficients(coefficients); //设置模型对应的系数
proj.filter(*cloud_projected); //投影结果存储
//打印投影后的云
std::cerr << "Cloud after projection: " << std::endl;
for (size_t i = 0; i < cloud_projected->points.size(); ++i)
std::cerr << " " << cloud_projected->points[i].x << " "
<< cloud_projected->points[i].y << " "
<< cloud_projected->points[i].z << std::endl;
return (0);
}
运行结果:
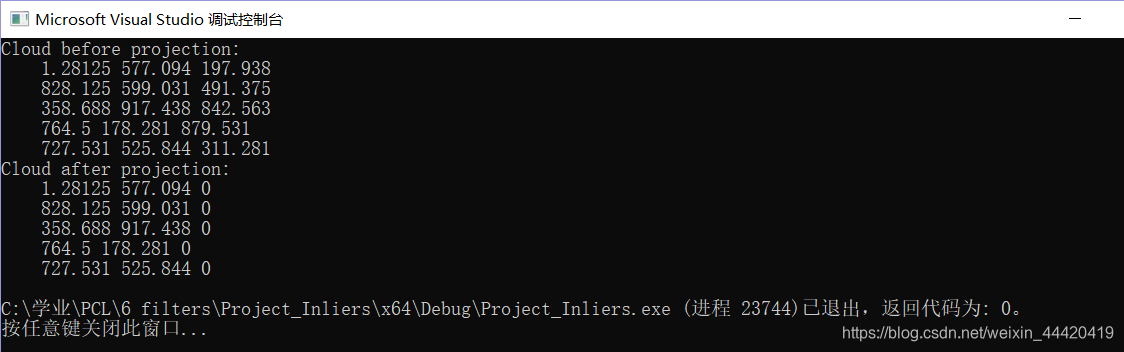
可见,实验结果可以看出投影前的Z轴都不为0 ,都是随机产生的值,投影之后,打印的结果表明,xy的值都没有改变,z都变为0。
注1:可能报错
error C4996: ‘pcl::SAC_SAMPLE_SIZE’: This map is deprecated and is kept only to prevent breaking existing user code. Starting from PCL 1.8.0 model sample size is a protected member of the SampleConsensusModel class
解决方法:https://blog.csdn.net/wokaowokaowokao12345/article/details/51287011
注2:PCL中存储的可投影的几何模型结构
https://blog.csdn.net/fandq1223/article/details/53176311
未完待续。