版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/lxn9492878lbl/article/details/84797278
之前的文章也见过tiago的slam建图方法,那个是使用的rosservice启动的,现在使用一般的命令进行启动。
https://blog.csdn.net/lxn9492878lbl/article/details/83060819
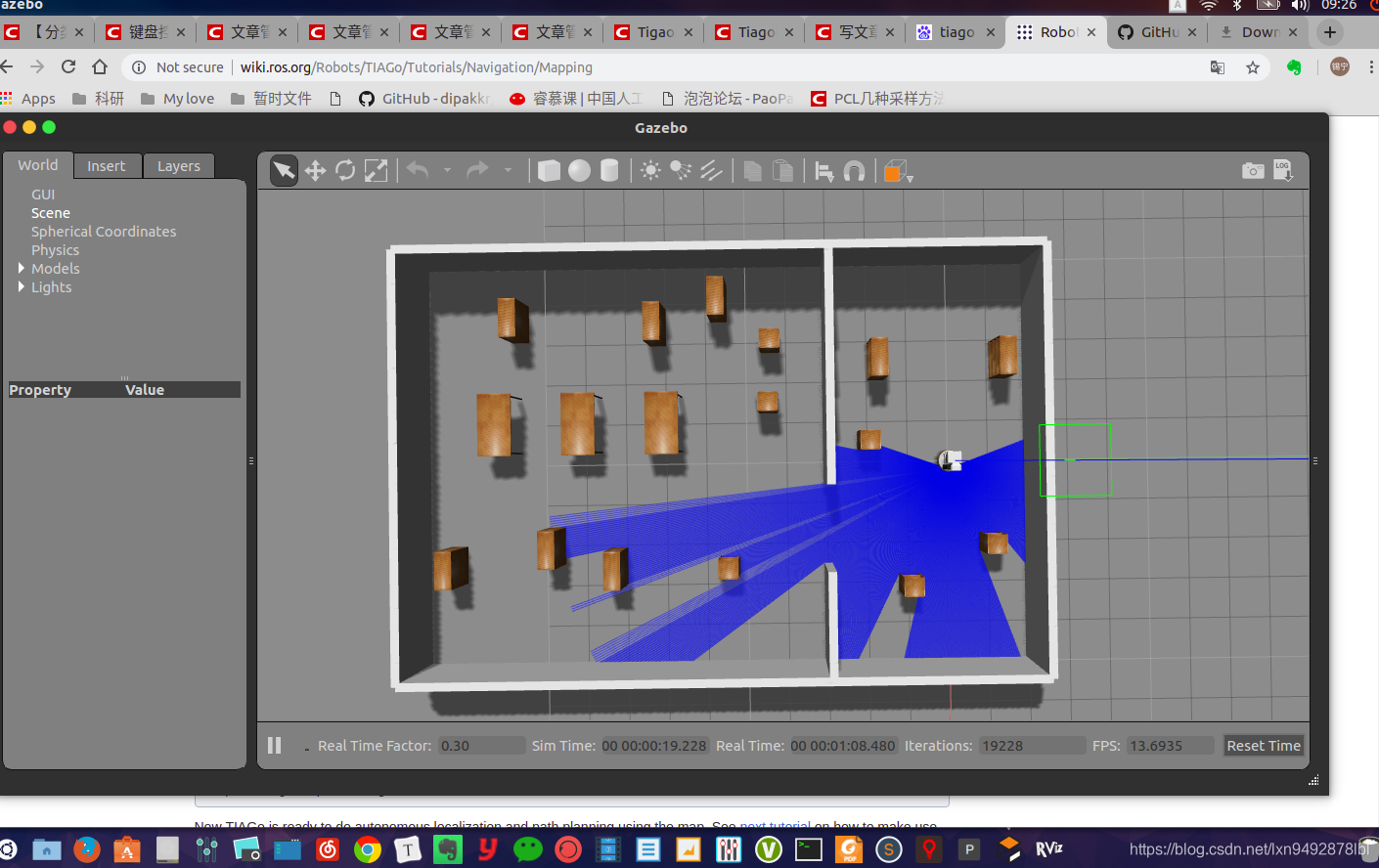
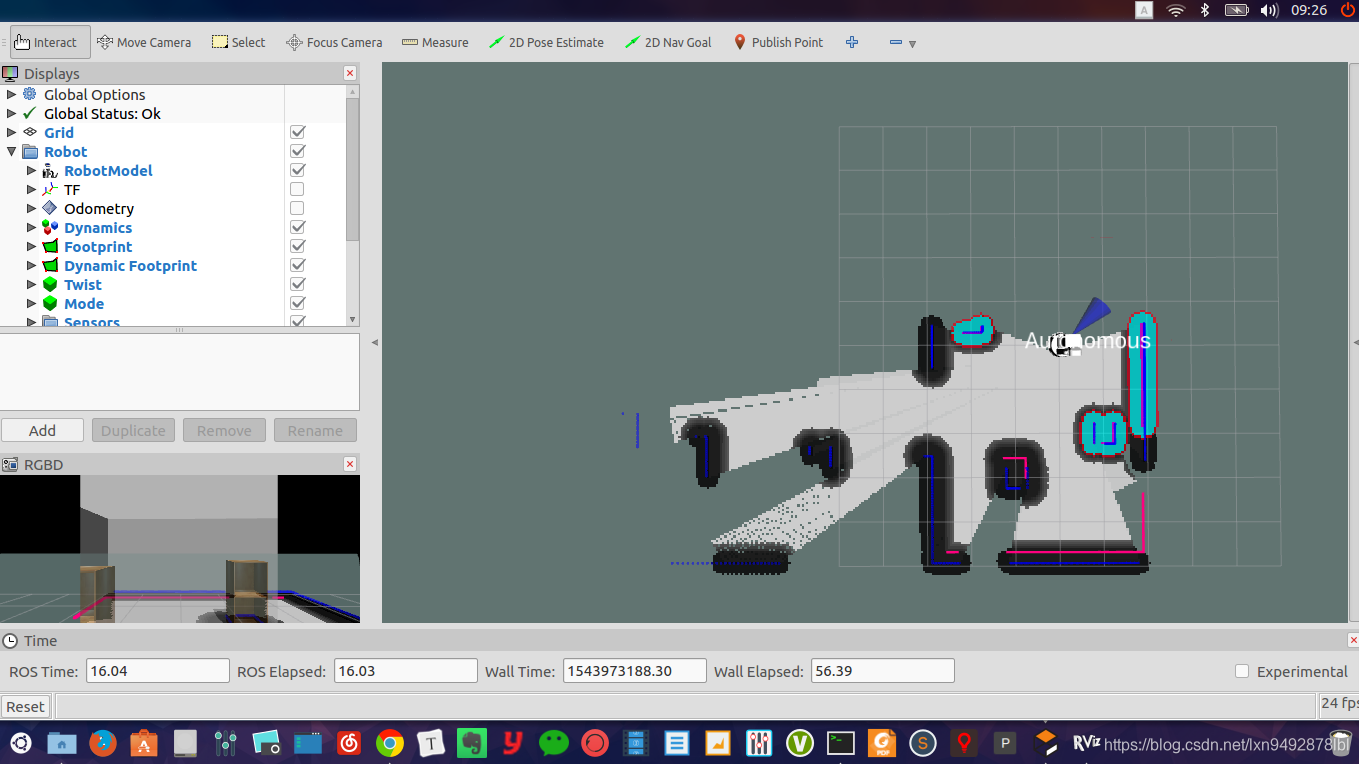
首先启动仿真器
roslaunch tiago_2dnav_gazebo tiago_mapping_public.launch
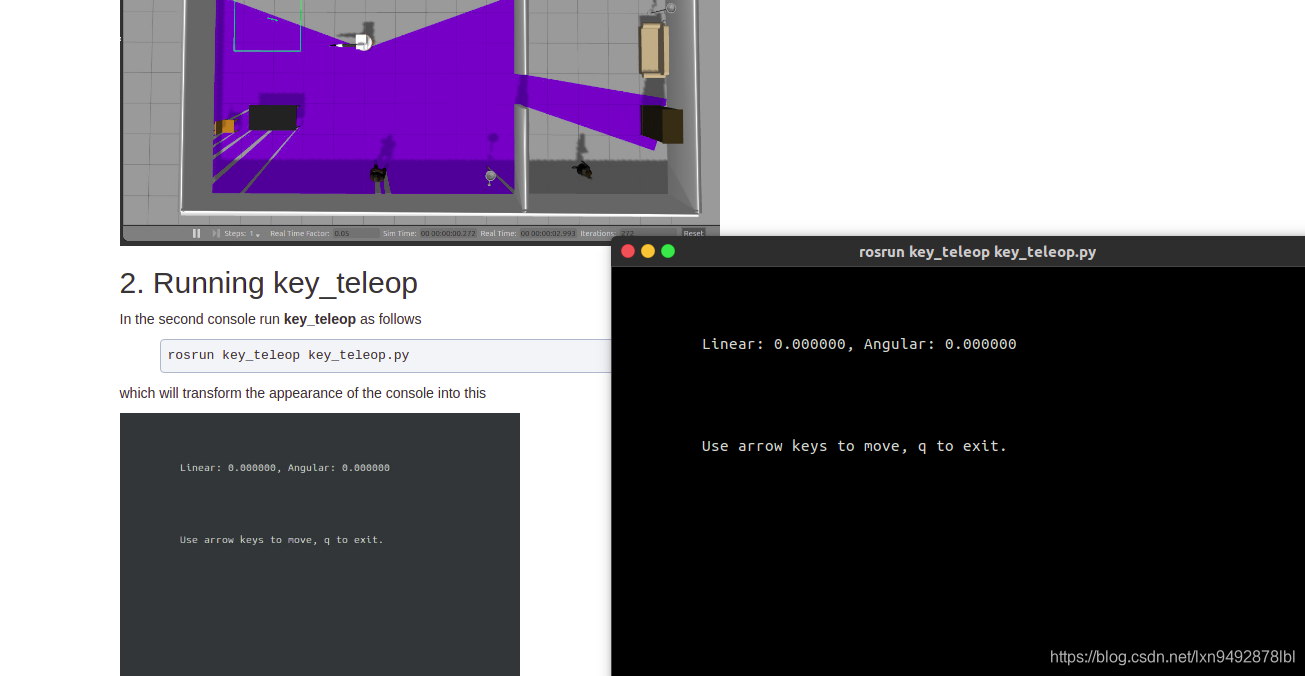
接下来启动键盘节点
rosrun key_teleop key_teleop.py
注意
这里附带说明一下,key_teleop的功能包可能需要自己下载,需要重现新建一个工作空间,当然也未必一定要在tiago_public_ws里面,可以在任何位置,只要启动了就可以控制机器人。
功能包的下载位置是
http://wiki.ros.org/key_teleop
这个功能包可以适用任何的机器人,当然需要修改下,可以用键盘,鼠标,手柄控制,编译好之后,rosrun启动就行。在真实的机器人上也可以用。