为什么Torch是动态的
动态?静态?
首先得知道谁是静态的. 在流行的神经网络模块中, Tensorflow 就是最典型的静态计算模块. 下图是一种我在强化学习教程中的 Tensorflow 计算图. 也就是说, 大部分时候,
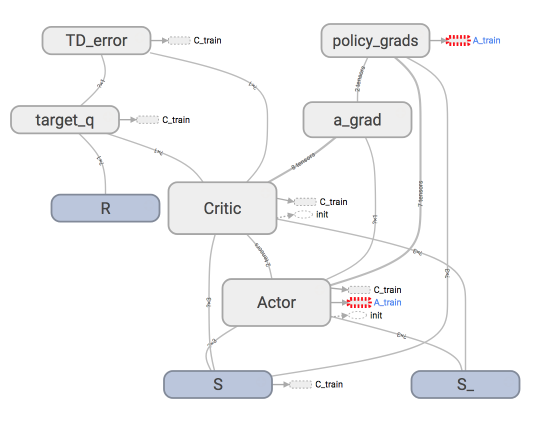
用 Tensorflow 是先搭建好这样一个计算系统, 一旦搭建好了, 就不能改动了 (也有例外, 比如dynamic_rnn(), 但是总体来说他还是运用了一个静态思维), 所有的计算都会在这种图中流动, 当然很多情况, 这样就够了, 我们不需要改动什么结构. 不动结构当然可以提高效率.
但是一旦计算流程不是静态的, 计算图要变动. 最典型的例子就是 RNN, 有时候 RNN 的 time_step 不会一样, 或者在 training 和 testing 的时候, batch_size 和 time_step 也不一样, 这时, Tensorflow 就头疼了, Tensorflow 的人也头疼了. 哈哈, 如果用一个动态计算图的 Torch, 我们就好理解多了, 写起来也简单多了.
动态RNN
...
######################## 前面代码都一样, 下面开始不同 #########################
################ 那节内容的代码结构 (静态 time step) ##########
for step in range(60):
start, end = step * np.pi, (step+1)*np.pi # time steps 都是一样长的
# use sin predicts cos
steps = np.linspace(start, end, 10, dtype=np.float32)
...
################ 这节内容修改代码 (动态 time step) #########
step = 0
for i in range(60):
dynamic_steps = np.random.randint(1, 4) # 随机 time step 长度
start, end = step * np.pi, (step + dynamic_steps) * np.pi # different time steps length
step += dynamic_steps
# use sin predicts cos
steps = np.linspace(start, end, 10 * dynamic_steps, dtype=np.float32)
####################### 这下面又一样了 ###########################
print(len(steps)) # print how many time step feed to RNN
x_np = np.sin(steps) # float32 for converting torch FloatTensor
y_np = np.cos(steps)
...
"""
输出的动态time step 长
30
30
10
30
20
30
"""
有人会说了, Tensorflow 也有类似的功能呀, 比如说 dynamic_rnn(). 对的, 没错, 不过大家是否想过, 如果我在 Tensorflow 当中定义一个 input 的 placeholder, 这个 placeholder 将会有 (batch, time step, input size) 这几个维度, batch 好说, 随便什么大小都可以, 可是 time step 可是固定的呀, 这可不好改, 或者说改起来很麻烦. 那 PyTorch 中又可以变 batch 又可以变 time step, 这不是很方便吗. 这就体现了动态神经网络的好处.
GPU加速
用GPU训练CNN
这份 GPU 的代码是依据之前这份CNN的代码修改的. 大概修改的地方包括将数据的形式变成 GPU 能读的形式, 然后将 CNN 也变成 GPU 能读的形式. 做法就是在后面加上 .cuda(), 很简单.
…
test_data = torchvision.datasets.MNIST(root='./mnist/', train=False)
# !!!!!!!! 修改 test data 形式 !!!!!!!!! #
test_x = torch.unsqueeze(test_data.test_data, dim=1).type(torch.FloatTensor)[:2000].cuda()/255. # Tensor on GPU
test_y = test_data.test_labels[:2000].cuda()
再来把我们的 CNN 参数也变成 GPU 兼容形式.
class CNN(nn.Module):
...
cnn = CNN()
# !!!!!!!! 转换 cnn 去 CUDA !!!!!!!!! #
cnn.cuda() # Moves all model parameters and buffers to the GPU.
然后就是在 train 的时候, 将每次的training data 变成 GPU 形式. + .cuda()
for epoch ..:
for step, ...:
# !!!!!!!! 这里有修改 !!!!!!!!! #
b_x = x.cuda() # Tensor on GPU
b_y = y.cuda() # Tensor on GPU
...
if step % 50 == 0:
test_output = cnn(test_x)
# !!!!!!!! 这里有修改 !!!!!!!!! #
pred_y = torch.max(test_output, 1)[1].cuda().data.squeeze() # 将操作放去 GPU
accuracy = torch.sum(pred_y == test_y) / test_y.size(0)
...
test_output = cnn(test_x[:10])
# !!!!!!!! 这里有修改 !!!!!!!!! #
pred_y = torch.max(test_output, 1)[1].cuda().data.squeeze() # 将操作放去 GPU
...
print(test_y[:10], 'real number')
转移至 CPU
如果你有些计算还是需要在 CPU 上进行的话呢, 比如 plt 的可视化, 我们需要将这些计算或者数据转移至 CPU.
cpu_data = gpu_data.cpu()
过拟合
一种专门用在神经网络的正规化的方法, 叫作 dropout. 在训练的时候, 我们随机忽略掉一些神经元和神经联结 , 是这个神经网络变得”不完整”. 用一个不完整的神经网络训练一次.
到第二次再随机忽略另一些, 变成另一个不完整的神经网络. 有了这些随机 drop 掉的规则, 我们可以想象其实每次训练的时候, 我们都让每一次预测结果都不会依赖于其中某部分特定的神经元. 像l1, l2正规化一样, 过度依赖的 W , 也就是训练参数的数值会很大, l1, l2会惩罚这些大的 参数. Dropout 的做法是从根本上让神经网络没机会过度依赖.
做点数据
自己做一些伪数据, 用来模拟真实情况. 数据少, 才能凸显过拟合问题, 所以我们就做10个数据点.
import torch
import matplotlib.pyplot as plt
torch.manual_seed(1) # reproducible
N_SAMPLES = 20
N_HIDDEN = 300
# training data
x = torch.unsqueeze(torch.linspace(-1, 1, N_SAMPLES), 1)
y = x + 0.3*torch.normal(torch.zeros(N_SAMPLES, 1), torch.ones(N_SAMPLES, 1))
# test data
test_x = torch.unsqueeze(torch.linspace(-1, 1, N_SAMPLES), 1)
test_y = test_x + 0.3*torch.normal(torch.zeros(N_SAMPLES, 1), torch.ones(N_SAMPLES, 1))
搭建神经网络
我们在这里搭建两个神经网络, 一个没有 dropout, 一个有 dropout. 没有 dropout 的容易出现 过拟合, 那我们就命名为 net_overfitting, 另一个就是 net_dropped. torch.nn.Dropout(0.5) 这里的 0.5 指的是随机有 50% 的神经元会被关闭/丢弃.
net_overfitting = torch.nn.Sequential(
torch.nn.Linear(1, N_HIDDEN),
torch.nn.ReLU(),
torch.nn.Linear(N_HIDDEN, N_HIDDEN),
torch.nn.ReLU(),
torch.nn.Linear(N_HIDDEN, 1),
)
net_dropped = torch.nn.Sequential(
torch.nn.Linear(1, N_HIDDEN),
torch.nn.Dropout(0.5), # drop 50% of the neuron
torch.nn.ReLU(),
torch.nn.Linear(N_HIDDEN, N_HIDDEN),
torch.nn.Dropout(0.5), # drop 50% of the neuron
torch.nn.ReLU(),
torch.nn.Linear(N_HIDDEN, 1),
)
训练
训练的时候, 这两个神经网络分开训练. 训练的环境都一样.
optimizer_ofit = torch.optim.Adam(net_overfitting.parameters(), lr=0.01)
optimizer_drop = torch.optim.Adam(net_dropped.parameters(), lr=0.01)
loss_func = torch.nn.MSELoss()
for t in range(500):
pred_ofit = net_overfitting(x)
pred_drop = net_dropped(x)
loss_ofit = loss_func(pred_ofit, y)
loss_drop = loss_func(pred_drop, y)
optimizer_ofit.zero_grad()
optimizer_drop.zero_grad()
loss_ofit.backward()
loss_drop.backward()
optimizer_ofit.step()
optimizer_drop.step()
对比测试结果
需要注意的是Dropout在测试集上预测结果的时候不需要,需要用上全部的神经元信息,这点需要使用eval改回预测模式。
在这个 for 循环里, 我们加上画测试图的部分. 注意在测试时, 要将网络改成 eval() 形式, 特别是 net_dropped, net_overfitting 改不改其实无所谓. 画好图再改回 train() 模式.
...
optimizer_ofit.step()
optimizer_drop.step()
# 接着上面来
if t % 10 == 0: # 每 10 步画一次图
# 将神经网络转换成测试形式, 画好图之后改回 训练形式
net_overfitting.eval()
net_dropped.eval() # 因为 drop 网络在 train 的时候和 test 的时候参数不一样.
...
test_pred_ofit = net_overfitting(test_x)
test_pred_drop = net_dropped(test_x)
...
# 将两个网络改回 训练形式
net_overfitting.train()
net_dropped.train()
什么是批标准化 (Batch Normalization)
普通数据标准化
Batch Normalization, 批标准化, 和普通的数据标准化类似, 是将分散的数据统一的一种做法, 也是优化神经网络的一种方法. 在之前 Normalization 的简介视频中我们一提到, 具有统一规格的数据, 能让机器学习更容易学习到数据之中的规律.
每层都做标准化
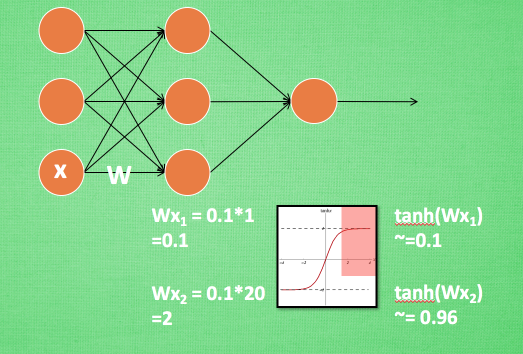
在神经网络中, 数据分布对训练会产生影响. 比如某个神经元 x 的值为1, 某个 Weights 的初始值为 0.1, 这样后一层神经元计算结果就是 Wx = 0.1; 又或者 x = 20, 这样 Wx 的结果就为 2. 现在还不能看出什么问题, 但是, 当我们加上一层激励函数, 激活这个 Wx 值的时候, 问题就来了. 如果使用 像 tanh 的激励函数, Wx 的激活值就变成了 ~0.1 和 ~1, 接近于 1 的部已经处在了 激励函数的饱和阶段, 也就是如果 x 无论再怎么扩大, tanh 激励函数输出值也还是 接近1.
换句话说, 神经网络在初始阶段已经不对那些比较大的 x 特征范围 敏感了.
这样很糟糕, 想象我轻轻拍自己的感觉和重重打自己的感觉居然没什么差别, 这就证明我的感官系统失效了. 当然我们是可以用之前提到的对数据做 normalization 预处理, 使得输入的 x 变化范围不会太大, 让输入值经过激励函数的敏感部分. 但刚刚这个不敏感问题不仅仅发生在神经网络的输入层, 而且在隐藏层中也经常会发生.
只是时候 x 换到了隐藏层当中, 我们能不能对隐藏层的输入结果进行像之前那样的normalization 处理呢? 答案是可以的, 因为大牛们发明了一种技术, 叫做 batch normalization, 正是处理这种情况.
BN 添加位置
Batch normalization 的 batch 是批数据, 把数据分成小批小批进行 stochastic gradient descent. 而且在每批数据进行前向传递 forward propagation 的时候, 对每一层都进行 normalization 的处理,
BN 效果
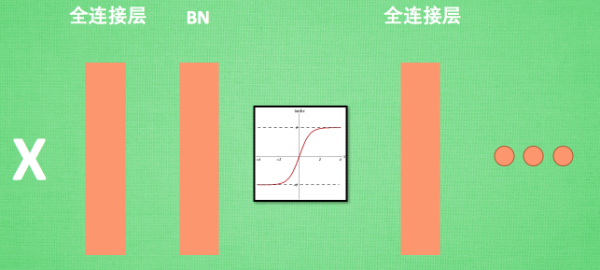
Batch normalization 也可以被看做一个层面. 在一层层的添加神经网络的时候, 我们先有数据 X, 再添加全连接层, 全连接层的计算结果会经过 激励函数 成为下一层的输入, 接着重复之前的操作. Batch Normalization (BN) 就被添加在每一个全连接和激励函数之间.
之前说过, 计算结果在进入激励函数前的值很重要, 如果我们不单单看一个值, 我们可以说, 计算结果值的分布对于激励函数很重要. 对于数据值大多分布在这个区间的数据, 才能进行更有效的传递. 对比这两个在激活之前的值的分布. 上者没有进行 normalization, 下者进行了 normalization, 这样当然是下者能够更有效地利用 tanh 进行非线性化的过程.
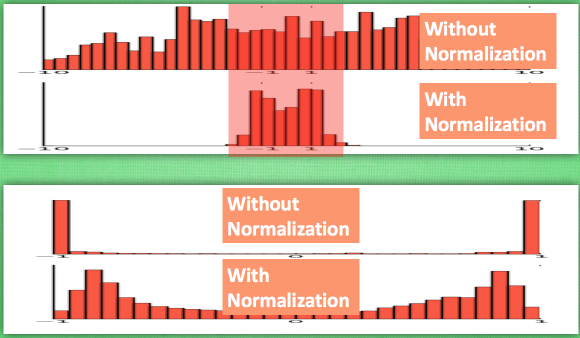
没有 normalize 的数据 使用 tanh 激活以后, 激活值大部分都分布到了饱和阶段, 也就是大部分的激活值不是-1, 就是1, 而 normalize 以后, 大部分的激活值在每个分布区间都还有存在. 再将这个激活后的分布传递到下一层神经网络进行后续计算, 每个区间都有分布的这一种对于神经网络就会更加有价值. Batch normalization 不仅仅 normalize 了一下数据, 他还进行了反 normalize 的手续. 为什么要这样呢?
BN 算法
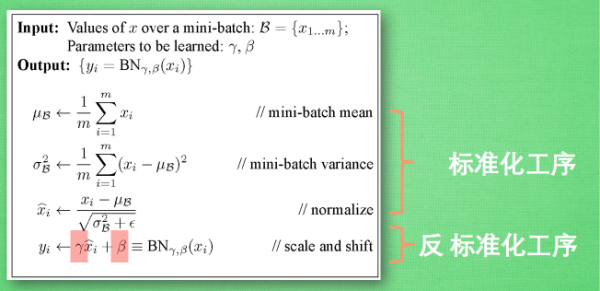
我们引入一些 batch normalization 的公式. 这三步就是我们在刚刚一直说的 normalization 工序, 但是公式的后面还有一个反向操作, 将 normalize 后的数据再扩展和平移. 原来这是为了让神经网络自己去学着使用和修改这个扩展参数 gamma, 和 平移参数 β, 这样神经网络就能自己慢慢琢磨出前面的 normalization 操作到底有没有起到优化的作用, 如果没有起到作用, 我就使用 gamma 和 belt 来抵消一些 normalization 的操作.
Batch Normalization in PyTorch
批标准化通俗来说就是对每一层神经网络进行标准化 (normalize) 处理, 我们知道对输入数据进行标准化能让机器学习有效率地学习. 如果把每一层后看成这种接受输入数据的模式, 那我们何不 “批标准化” 所有的层呢?
做点数据
自己做一些伪数据, 用来模拟真实情况. 而且 Batch Normalization (之后都简称BN) 还能有效的控制坏的参数初始化 (initialization), 比如说 ReLU 这种激励函数最怕所有的值都落在附属区间, 那我们就将所有的参数都水平移动一个 -0.2 (bias_initialization = -0.2), 来看看 BN 的实力.
import torch
from torch import nn
from torch.nn import init
import torch.utils.data as Data
import torch.nn.functional as F
import matplotlib.pyplot as plt
import numpy as np
# 超参数
N_SAMPLES = 2000
BATCH_SIZE = 64
EPOCH = 12
LR = 0.03
N_HIDDEN = 8
ACTIVATION = F.tanh # 你可以换 relu 试试
B_INIT = -0.2 # 模拟不好的 参数初始化
# training data
x = np.linspace(-7, 10, N_SAMPLES)[:, np.newaxis]
noise = np.random.normal(0, 2, x.shape)
y = np.square(x) - 5 + noise
# test data
test_x = np.linspace(-7, 10, 200)[:, np.newaxis]
noise = np.random.normal(0, 2, test_x.shape)
test_y = np.square(test_x) - 5 + noise
train_x, train_y = torch.from_numpy(x).float(), torch.from_numpy(y).float()
test_x = torch.from_numpy(test_x).float()
test_y = torch.from_numpy(test_y).float()
train_dataset = Data.TensorDataset(train_x, train_y)
train_loader = Data.DataLoader(dataset=train_dataset, batch_size=BATCH_SIZE, shuffle=True, num_workers=2,)
搭建神经网络
这里就教你如何构建带有 BN 的神经网络的. BN 其实可以看做是一个 layer (BN layer). 我们就像平时加层一样加 BN layer 就好了. 注意, 我还对输入数据进行了一个 BN 处理, 因为如果你把输入数据看出是 从前面一层来的输出数据, 我们同样也能对她进行 BN. 注意, 视频里面对于 momentum 的描述说错了, 不是用来更新缩减和平移参数的, 而是用来平滑化 batch mean and stddev 的
class Net(nn.Module):
def __init__(self, batch_normalization=False):
super(Net, self).__init__()
self.do_bn = batch_normalization
self.fcs = [] # 太多层了, 我们用 for loop 建立
self.bns = []
self.bn_input = nn.BatchNorm1d(1, momentum=0.5) # 给 input 的 BN
for i in range(N_HIDDEN): # 建层
input_size = 1 if i == 0 else 10
fc = nn.Linear(input_size, 10)
setattr(self, 'fc%i' % i, fc) # 注意! pytorch 一定要你将层信息变成 class 的属性! 我在这里花了2天时间发现了这个 bug
self._set_init(fc) # 参数初始化
self.fcs.append(fc)
if self.do_bn:
bn = nn.BatchNorm1d(10, momentum=0.5)
setattr(self, 'bn%i' % i, bn) # 注意! pytorch 一定要你将层信息变成 class 的属性! 我在这里花了2天时间发现了这个 bug
self.bns.append(bn)
self.predict = nn.Linear(10, 1) # output layer
self._set_init(self.predict) # 参数初始化
def _set_init(self, layer): # 参数初始化
init.normal_(layer.weight, mean=0., std=.1)
init.constant_(layer.bias, B_INIT)
def forward(self, x):
pre_activation = [x]
if self.do_bn: x = self.bn_input(x) # 判断是否要加 BN
layer_input = [x]
for i in range(N_HIDDEN):
x = self.fcs[i](x)
pre_activation.append(x) # 为之后出图
if self.do_bn: x = self.bns[i](x) # 判断是否要加 BN
x = ACTIVATION(x)
layer_input.append(x) # 为之后出图
out = self.predict(x)
return out, layer_input, pre_activation
# 建立两个 net, 一个有 BN, 一个没有
nets = [Net(batch_normalization=False), Net(batch_normalization=True)]
训练
训练的时候, 这两个神经网络分开训练. 训练的环境都一样.
opts = [torch.optim.Adam(net.parameters(), lr=LR) for net in nets]
loss_func = torch.nn.MSELoss()
losses = [[], []] # 每个网络一个 list 来记录误差
for epoch in range(EPOCH):
print('Epoch: ', epoch)
for step, (b_x, b_y) in enumerate(train_loader):
for net, opt in zip(nets, opts): # 训练两个网络
pred, _, _ = net(b_x)
loss = loss_func(pred, b_y)
opt.zero_grad()
loss.backward()
opt.step() # 这也会训练 BN 里面的参数