注:软件调试需要 Qgroundcontrol(以下简称 QGC)需要完整版 Windows 系统,ghost 版本 的系统无论是 32 位还是 64 位都出现连接闪退现象。如有问题,请重装系统或者装双系 统,教程请自行百度。调试阶段树莓派先用电源适配器供电,别忘把 SD 卡插到树莓派。
硬件准备:树莓派,pixhawk,USB 连接线(连接 pixhawk 和树莓派),网线一根,电脑一 台(作为主机),电池 手柄,电调以及电机(以便调试使用)等。
软件准备:QGC,putty,其他所需系统软件以及固件已经全部封装到树莓派和飞控里面。软 件下载地址在最后!
先附连线图一张:

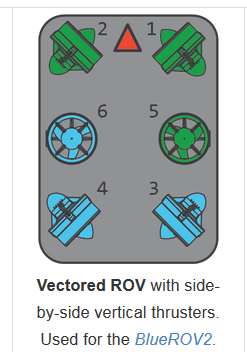
Bluerov2电机布局图如下图示:
1 硬件系统的搭建
1.1电调与电机(如果你用的是推进器总成,则无需这一步,直接接上电源正,电源负,信号线即可)
我建议就像图一所示那样,把电机固定到一个板子上(一定要可拆卸),电调和电机三根线相连(有的电调三根线没有引出,请自行焊接),电调供电是两根线(红线和黑线,红正黑负),可以将电调的供电线仿照如下两图操作。


 将电调供电线全部焊接到上面的板子的背面上,分清正负。电机就是与电调的三根线相连,前期调试可以先用电工胶带将电调的三根线和电机的三根线粘到一起。然后电池就可以直接给这个电调以及电机供电了。电池正负极接到板子标的相应正负端。
将电调供电线全部焊接到上面的板子的背面上,分清正负。电机就是与电调的三根线相连,前期调试可以先用电工胶带将电调的三根线和电机的三根线粘到一起。然后电池就可以直接给这个电调以及电机供电了。电池正负极接到板子标的相应正负端。
1.2 飞控,树莓派
飞控不仅提供控制信号还要负责与树莓派通信,所以飞控要与电调相连接,也要和树莓派相连,连接图如下图所示:

如上图所示,main out端口从右往左依次是1到6号电机。

黄色圈出的是树莓派和飞控连接,红色的画出的是树莓派和主机连接。
2 软件系统的搭建
第一步,修改主机的IP
按照下列图操作即可





 然后点击“确定”,关闭即可。
然后点击“确定”,关闭即可。
第二步 联合调试
电机电调树莓派连接完毕以及供电没有问题之后,将手柄接头插入电脑,
开始下一步操作。
打开QGC,如下图所示:

此时如果连接无误的话,摄像头会出现视频,摇动飞控时,上图右上角的码盘对跟着摇动。

如果显示框没有图像,打开上图的界面,video source按照上图选择!



以上三个图是传感器和手柄调试界面,绿色代表已经交准好,主要是对飞控里面的陀螺仪和加速度计校准。
完成以上操作后,回到图十四的界面,用手柄的摇杆即可操作电机!
软件下载地址
QGC:https://docs.qgroundcontrol.com/en/getting_started/download_and_install.html
Putty:http://rj.baidu.com/soft/detail/15699.html?ald
结束语:本博客会不定期分享一些关于水下机器人ROV和水下视觉算法相关的内容,我们与大家一起交流学习!海目云海洋科技,主营水下机器人ROV及海洋监测等水下业务,有业务或有兴趣合作的老板可以联系我们的公邮[email protected]或联系我们的QQ:2154316420,QQ:925776878,也可电脑端登录淘宝查看我们的小店https://shop369876451.taobao.com/?spm=a230r.7195193.1997079397.2.2a8171a6c12Q7e,手机端搜索“海目云海洋科技”,我们期待您的光临!