【单片机项目】平衡小车(二) 硬件设计

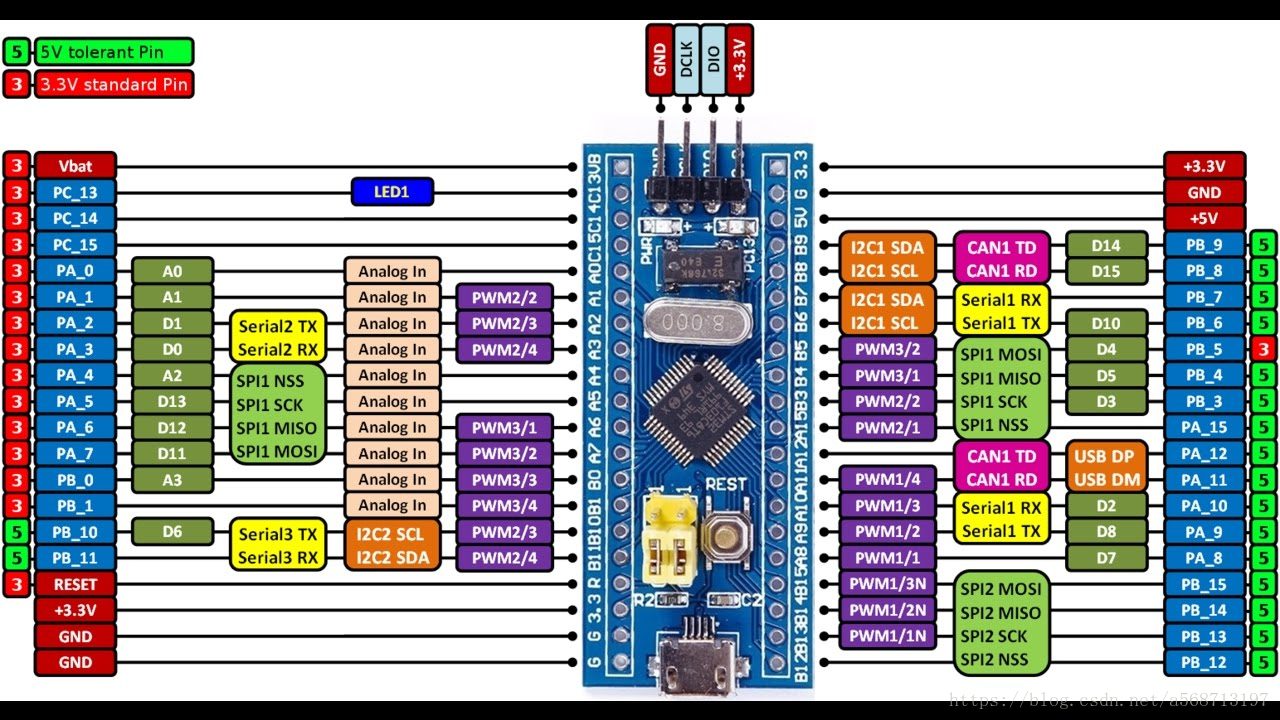
以下是核心板的引脚图:


为了进行PID调节,平衡小车要选用带编码盘的直流减速电机,编码盘是霍尔磁力传感器,编码器有霍尔磁力编码器以及光电编码器,霍尔磁力编码器是通过测定磁场的变化来测速,而光电编码器则是有空槽的编码盘转动来测速,光电编码器价格会高些,但是精确度会好很多,但是对于平衡小车来说,用霍尔磁力编码器就足够了。












猜你喜欢
转载自blog.csdn.net/a568713197/article/details/83016884
今日推荐
周排行