这几天有时间做了一个手机控制的蓝牙遥控小车车,终于今天实现了,把过程和心得跟大家分享一下。
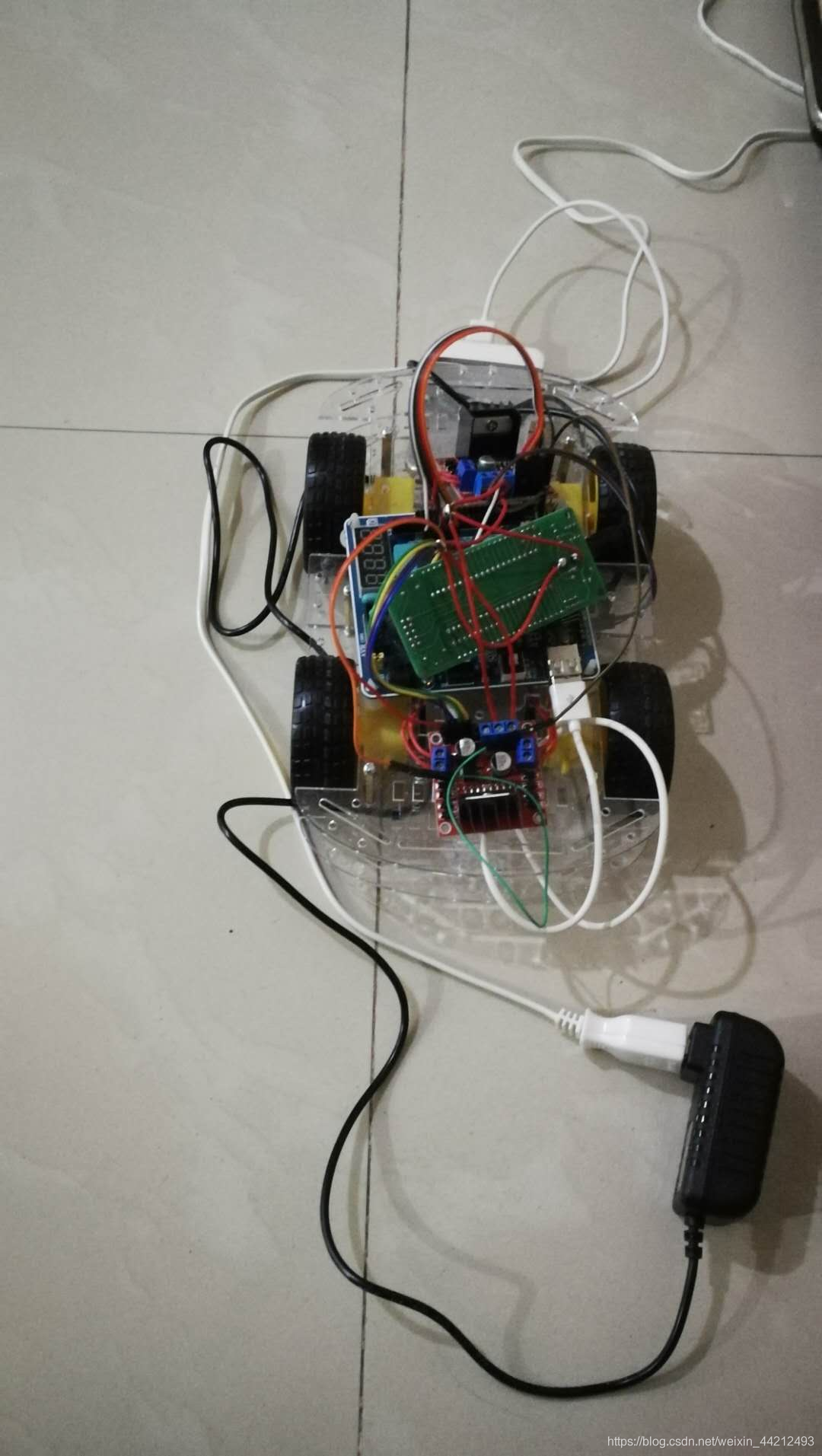
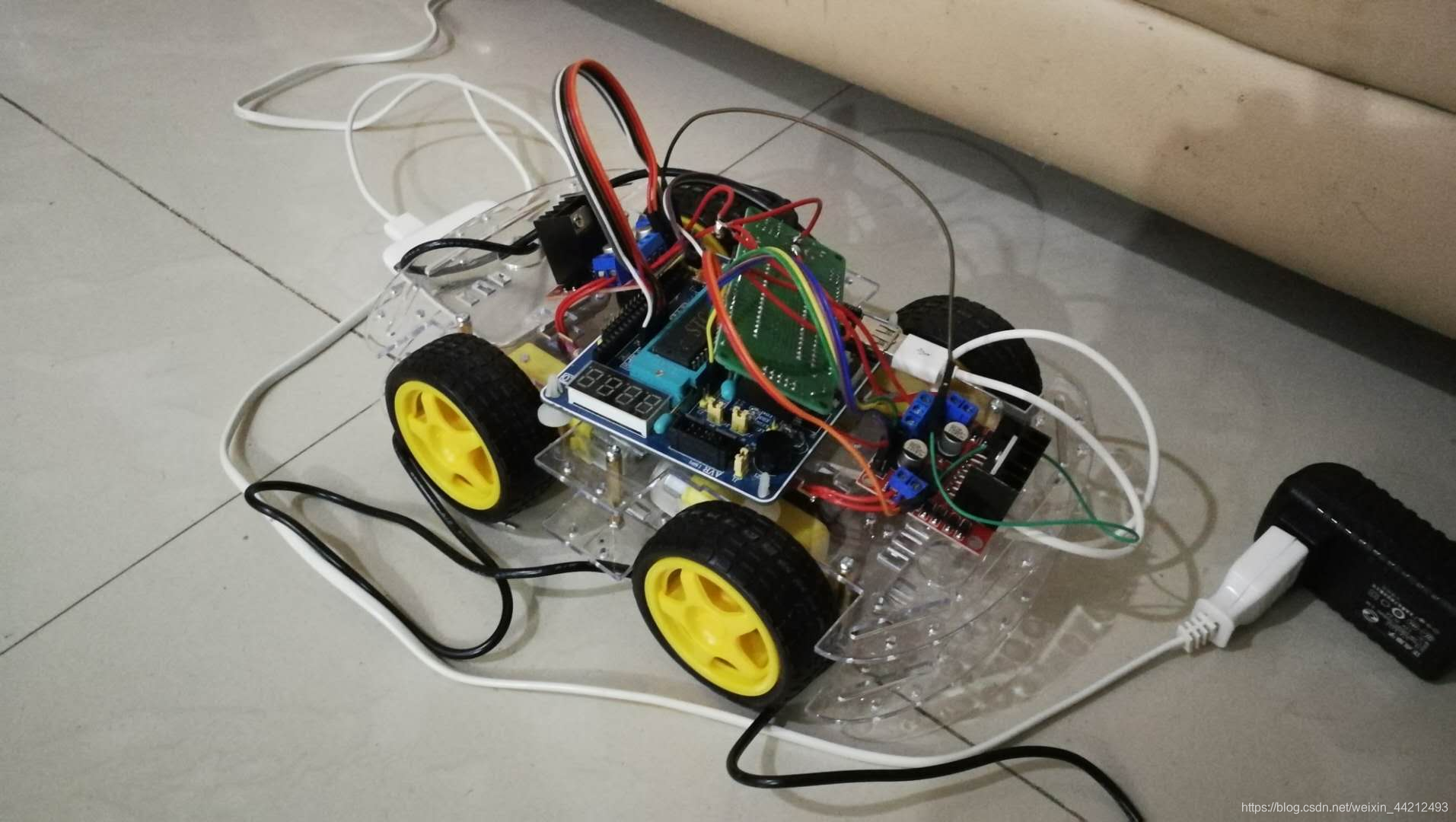
废话不多说,先上实物图
一、项目元件清单
1、某宝购买一个智能小车底盘(本人车是四驱的,因此有四个电机,两块亚克力板和一些配件螺丝)
2、L298n模块 两个(一个298控制两个电机)
3、HC-06蓝牙模块
4、电池盒跟18650电池3个
5、单片机最小系统
6、杜邦线至少12根,当然越多越好
7、若干根导线(连接电机用的,以及电池盒连到L298N跟单片机)
二、制作过程
首先,先去了解一下L298N的接线,我当时也是懵逼了好久,反正摸索着也会了,一般店家都有资料。然后是蓝牙模块的使用,拿到蓝牙模块后,有开发板的话(没有就用单片机的烧录器),先按照TXD接TXD,RXD接RXD,打开电脑的串口助手与蓝牙构建通信,打开AT,发送AT指令集,比如设设波特率,改个名字,改个配对的密码。但通过蓝牙与单片机连接通信的时候,就是TXD接RXD了。最后一个就是,本人在接线的时候经常碰壁。比如,你以为接好的线他其实没接好,根本没通,还是拿万用表B了才知道。
因为本人忘了买电池盒,所以我是用12V的直流电接着的,导致遥控车拖着跟电线。
三、实物图
(拖着跟电线以及充电宝供电的车 不过我没通电)
资料内包括L298N的部分资料,以及蓝牙的说明书(看AT指令集就好)和源程序。
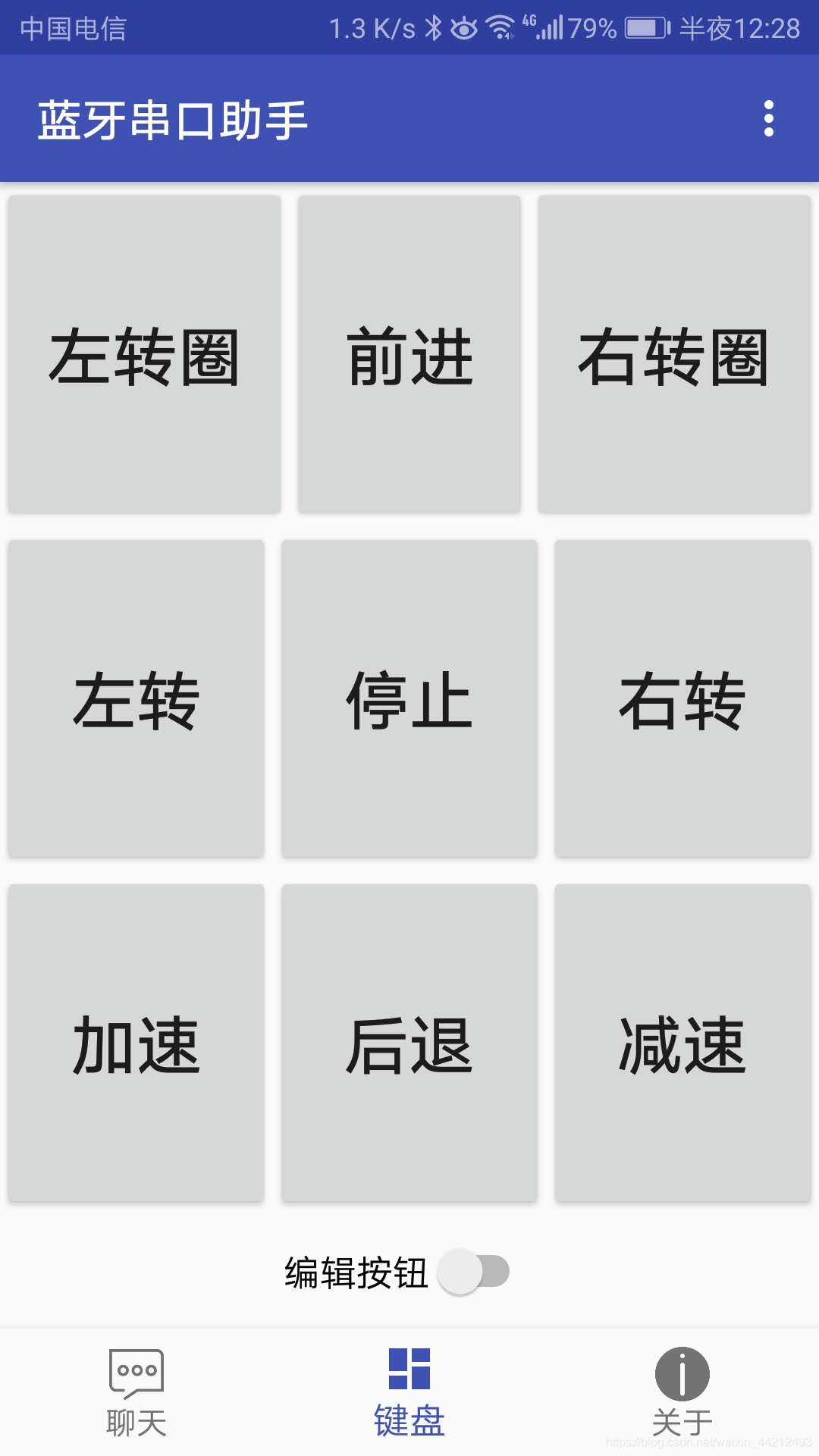
/手机蓝牙遥控小车 APP可以在应用市场搜 蓝牙串口助手
左转右转大概是90度 我的是四驱的,如果是只有一个l298N的话就把带2的删了
pwm有十级变速/
#include <reg52.h>
#define Left_moto2_pwm P0_4 //接驱动模块ENA 使能端,输入PWM信号调节速度 左后轮
#define Right_moto2_pwm P0_5 //接驱动模块ENB 右后轮
#define Left_moto_pwm P1_4 //接驱动模块ENA 使能端,输入PWM信号调节速度 左前轮
#define Right_moto_pwm P1_5 //接驱动模块ENB 右前轮
#define uchar unsigned char
#define uint unsigned int
sbit P0_4=P0^4; //定义P0_4
sbit P0_5=P0^5; //定义P0_5
sbit P1_4=P1^4; //定义P1_4
sbit P1_5=P1^5; //定义P1_5
/电机驱动IO定义/
sbit IN1 = P1^2; //为1 左电机反转 前轮
sbit IN2 = P1^3; //为1 左电机正转 前轮
sbit IN3 = P1^6; //为1 右电机正转 前轮
sbit IN4 = P1^7; //为1 右电机反转 前轮
/*sbit EN1 = P1^4; //为1 左电机使能
sbit EN2 = P1^5; //为1 右电机使能 */
sbit IN5 = P0^2; //为1 左电机反转 后轮
sbit IN6 = P0^3; //为1 左电机正转 后轮
sbit IN7 = P0^6; //为1 右电机正转 后轮
sbit IN8 = P0^7; //为1 右电机反转 后轮
/*sbit EN3 = P0^4; //为1 左电机使能 后轮
sbit EN4 = P0^5; //为1 右电机使能 后轮 */
bit Right_moto_stop=1;
bit Left_moto_stop =1;
unsigned int time=0;
int pwm=1;
#define left_motor_en EN1 = 1 //左电机使能
#define left_motor_stops EN1 = 0 //左电机停止
#define right_motor_en EN2 = 1 //右电机使能
#define right_motor_stops EN2 = 0 //右电机停止
#define left_motor2_en EN3 = 1 //左电机使能 后
#define left_motor2_stops EN3 = 0 //左电机停止 后
#define right_motor2_en EN4 = 1 //右电机使能 后
#define right_motor2_stops EN4 = 0 //右电机停止 后
#define left_motor_go IN1 = 0, IN2 = 1//左电机正传
#define left_motor_back IN1 = 1, IN2 = 0//左电机反转
#define right_motor_go IN3 = 1, IN4 = 0//右电机正传
#define right_motor_back IN3 = 0, IN4 = 1//右电机反转
#define left_motor2_go IN5 = 0, IN6 = 1//左电机正传
#define left_motor2_back IN5 = 1, IN6 = 0//左电机反转
#define right_motor2_go IN7 = 1, IN8 = 0//右电机正传
#define right_motor2_back IN7 = 0, IN8 = 1//右电机反转
unsigned char pwm_val_left =0;//变量定义
unsigned char push_val_left =0;// 左电机占空比N/10
unsigned char pwm_val_right =0;
unsigned char push_val_right=0;// 右电机占空比N/10
void delay(uint z)
{
uint x,y;
for(x = z; x > 0; x–)
for(y = 114; y > 0 ; y–);
}
//蓝牙初始化
void UART_INIT()
{
SM0 = 0;
SM1 = 1;//串口工作方式1
REN = 1;//允许串口接收
EA = 1;//开总中断
ES = 1;//开串口中断
TMOD = 0x20;//8位自动重装模式
TH1 = 0xfd;
TL1 = 0xfd;//9600波特率
TR1 = 1;//启动定时器1
}
/************************************************************************/
void run(void) //pwm调速函数
{
push_val_left =pwm; //PWM 调节参数1-10 1为最慢,10是最快 改这个值可以改变其速度
push_val_right =pwm; //PWM 调节参数1-10 1为最慢,10是最快 改这个值可以改变其速度
if(pwm10) pwm=0;
if(pwm0&&pwm<0) pwm=0;
}
/***********************************************************************/
/ PWM调制电机转速 /
/***********************************************************************/
/* 左侧电机调速 */
/*调节push_val_left的值改变电机转速,占空比 */
void pwm_out_left_moto(void)
{
if(Left_moto_stop)
{
if(pwm_val_left<=push_val_left)
{ Left_moto_pwm=1;
Left_moto2_pwm=1; }
else
{ Left_moto_pwm=0;Left_moto2_pwm=0; }
if(pwm_val_left>=10)
pwm_val_left=0;
}
else { Left_moto_pwm=0;Left_moto2_pwm=0; }
}
/*****************************************************************/
/ 右侧电机调速 /
void pwm_out_right_moto(void)
{
if(Right_moto_stop)
{
if(pwm_val_right<=push_val_right)
{ Right_moto_pwm=1;
Right_moto2_pwm=1; }
else
{Right_moto_pwm=0;
Right_moto2_pwm=0;}
if(pwm_val_right>=10)
pwm_val_right=0;
}
else {Right_moto_pwm=0;Right_moto2_pwm=0; }
}
/**************************************************/
///TIMER0中断服务子函数产生PWM信号/
void timer0()interrupt 1 using 2
{
TH0=0XF8; //1Ms定时
TL0=0X30;
time++;
pwm_val_left++;
pwm_val_right++;
pwm_out_left_moto();
pwm_out_right_moto();
}
//小车前进
void forward()
{
ET0 = 1;
run(); //pwm 程序
left_motor_go; //左电机前进
right_motor_go; //右电机前进
left_motor2_go; //左电机前进 后轮
right_motor2_go; //右电机前进 后轮
}
void left_go() //左转
{
ET0 = 1;
run();
left_motor_back;
right_motor_go;
left_motor2_back;
right_motor2_go;
delay(700);
forward();
}
//右转
void right_go()
{
ET0 = 1;
run();
delay(50);
right_motor_back;
left_motor_go;
right_motor2_back;
left_motor2_go;
delay(700);
forward();
}
//小车左转圈
void left()
{
ET0 = 1;
run();
delay(50);
right_motor_go; // 右电机前进
left_motor_back; // 左电机后退
right_motor2_go; // 右电机前进
left_motor2_back; // 左电机后退
}
//小车右转圈
void right()
{
ET0 = 1;
run();
left_motor_go;
right_motor_back;
left_motor2_go;
right_motor2_back;
}
//小车后退
void back()
{
ET0 = 1;
run();
left_motor_back;
right_motor_back;
left_motor2_back;
right_motor2_back;
}
//小车停止
void stop()
{
ET0 = 0;
P1=0;
P0=0;
}
//串口中断
void UART_SER() interrupt 4
{
if(RI)
{
RI = 0;//清除接收标志
switch(SBUF)
{
case ‘g’: forward(); break;//前进
case ‘b’: back(); break;//后退
case ‘l’: left(); break;//左转圈
case ‘r’: right(); break;//右转圈
case ‘s’: stop(); break;//停止
case ‘z’: left_go(); break;//左转行驶
case ‘y’: right_go(); break;//右转行驶
case ‘p’: pwm++;break; //加速
case ‘c’: pwm–;break; //减速
}
}
}
void main()
{
TMOD=0X01;
TH0= 0XF8; //1ms定时
TL0= 0X30;
TR0= 1;
ET0= 1;
EA = 1;
UART_INIT();//串口初始化
while(1);
}
最后,如果有什么意见或者建议欢迎您留言给我,让我们共同学习一起进步,
如果需要 完整代码或设计文件,请在下方留言或者私信我,看到后会第一时间回复。
谢谢!
