版权声明:本文为博主原创文章,转载请注明出处 https://blog.csdn.net/u013746357/article/details/52799601
本文图片和内容来自
<Android 3D 游戏开发技术宝典>
OpenGL ES 是OpenGL三维图形API的子集,主要针对手机等嵌入式设备。
OpenGL ES主要分为两个版本
-
- 一个是OpenGL ES1.x,其采用的是固定功能渲染管线,可以由硬件GPU支持或用软件模拟实现,渲染能力有限,在纯软件模拟情况下性能也较弱。
- 另一个就是OpenGL ES 2.0,其采用的是可编程渲染管线,渲染能力大大提高。OpenGL ES 2.0要求设备中必须有相应的GPU硬件支持,目前木支持在设备上用软件模拟实现。
着色器与渲染管线:
- OpenGL ES 1.X 的渲染管线
-
- 渲染管线有时也称之为渲染流水线,一般是由显卡(GPU)的内部处理图形信号的并行处理单元组成。这些并行处理单元两两之间是相互独立的,在不同的GPU上独立处理单元的数量也有很大差异,一般越高端显卡,该单元的数量就越多。
- 有些没有GPU硬件的设备上也有采用软件模拟实现管线中各个处理单元的情况,效率低下。
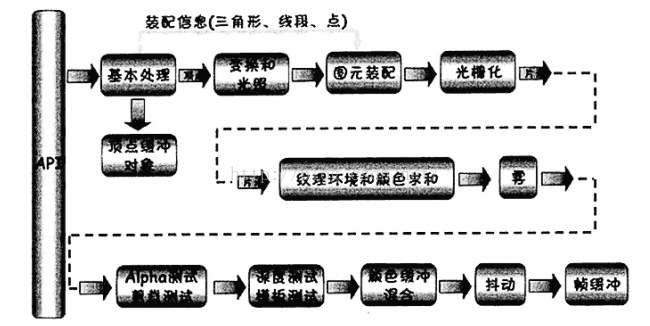
- 渲染流水线
-
- 基本处理
-
- 该阶段设定3D空间中物体的顶点坐标、顶点对应的颜色、顶点的纹理坐标等属性并且指定绘制方式,如:点绘制、线段绘制或者三角形绘制等等。
- 顶点缓冲对象
-
- 该部分功能在应用程序中是可选的,对于某些在整个场景中顶点的基本数据不变的情况,可以在初始化阶段将顶点数据经过基本处理后送入顶点缓冲对象,在绘制每一帧想要的图像时就省去了顶点数据IO的麻烦,直接从顶点缓冲对象中获取顶点数据即可。相比于每次绘制时单独将顶点数据送入GPU的方式,可以在一定程度上节省GPU的IO带宽,提高渲染效率。
- 变换和光照
-
- 该阶段的工作主要是进行顶点变换以及根据程序中设置的光照属性对顶点进行光照计算。顶点变换的任务是对3D物体的各顶点进行平移、旋转或者缩放等操作。光照计算的任务是根据程序送入的光源位置、性质、各通道强度、物体的材质等,公式再根据一定的光照数学模型计算各顶点的光照情况。
- 图元装配
-
- 这个阶段主要有两个任务,一个是图元组装,另一个是图元处理。
- 所谓图元组装是指顶点数据根据设置的绘制方式被结合成完整的图元。例如,点绘制方式仅需要一个单独的顶点,此方式下每个顶点为一个图元;线段绘制方式则需要两个顶点,此方式下每两个顶点构成一个图元;三角形绘制方式下需要三个顶点构成一个图元。
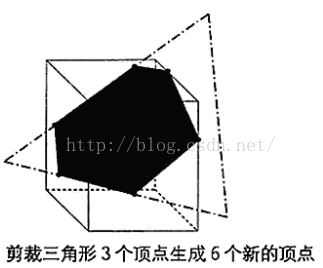
- 图元处理最重要的工作是裁剪,其任务是消除位于半空间(half-space)之外的部分几何图元,这个半空间是由一个剪裁平面所定义的。例如,点剪裁就是简单的接受或者拒绝顶点,线段或者多边形剪裁可能需要增加额外的顶点,具体取决于直线或者多边形与剪裁平面之间的位置关系
- 之所以要进行裁剪时因为随着观察位置角度的不同,并不总能看到(显示到设备屏幕上)特定3D物体某个图元的全部
- 裁剪时,若图元完全位于视景体以及自定义裁剪平面的内部,则将图元传递到后面的步骤进行处理;如果完全位于视景体或者自定义裁剪平面的外部,则丢弃该图元;如果其有一部分位于内部,另一部分位于外部,则需要裁剪该图元。
- 这个阶段主要有两个任务,一个是图元组装,另一个是图元处理。
- 光栅化
-
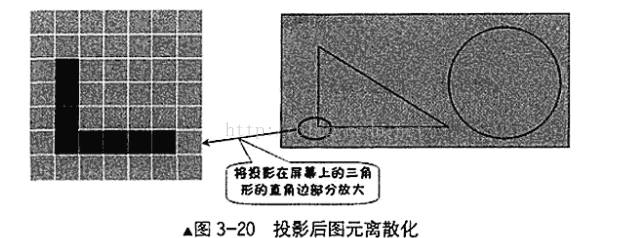
- 虽然虚拟3D世界中的几何信息是三维的,但由于目前用于显示的设备都是二维的,因此在真正执行光栅化工作之前,首先要将虚拟3D世界汇总的物体投影到视平面上。根据摄像机位置的不同,同一个3D场景的物体投影到视平面可能会产生不同的效果。
- 另外,由于虚拟3D世界当中物体的几何信息一般采用连续的数学量来表示,因此投影的平面结果也是用连续的数学量表示的。但目前的显示设备屏幕都是离散化的,因此还需要将投影的结果离散化。将其分解为一个一个离散化的小单元,这些小单元一般称之为片元。
- 其实每个片元都对应帧缓冲中的一个像素,之所以不直接称之为像素是因为3D空间中的物体时可以相互遮挡的。而一个3D场景最终显示到屏幕上虽然是一个整体,但每个3D物体的每个图元是独立处理的。可能出现这种情况,系统先处理的是位于观察点较远的图元,其光栅化成为了一组片元,暂时送入帧缓冲的相对应位置。但后面继续处理距离观察点较远的图元是也光栅化了一组片元,两组片元中有对应到帧缓冲中同一个位置的,这时距离近的片元将覆盖距离远的片元(如何覆盖的检测是在深度检测阶段完成)。因此某片元就不一定能成为最终屏幕上的像素,称之为像素就不准确了,可以理解为候选像素。
- 每个片元包含其对应的顶点坐标、顶点颜色、顶点纹理坐标以及顶点的深度等信息,这些信息是系统根据投影前此片元对应的3D空间中的位置及与此片元相关的图元的各顶点信息进行插值计算而生成的。
- 纹理环境和颜色求和
-
- 该阶段主要两个任务
- 一个是纹理采样任务,根据当前需处理片元的纹理坐标及采用的纹理id对应的纹理图进行纹理采样,获取采样值。所谓纹理采样就是从纹理图中某个纹理坐标位置获取的一个颜色值。
- 另一个是颜色求和,主要是执行颜色的变化,其根据纹理采样及光照计算等的结果综合生成需要处理片元的颜色。
- 雾
-
- 该阶段主要是根据程序中设置的雾的相关参数,如:颜色、浓度、范围等,以及某种雾的数学模型来计算当前处理的片元受雾影响后的颜色。
- Alpha测试
-
- 如果程序中启用的Alpha测试,OpenGL ES会检查每个片元的Alpha值,只有Alpha值符合测试条件的片元才会进入下一阶段,不满足条件的片元则被丢弃。
- 剪裁测试
-
- 如果程序中启用了裁剪测试,OpenGL ES 会检查每个片元在帧缓冲中对应的位置,若对应位置在裁剪窗口中则将此片元送入下一个阶段,否则丢弃此片元。
- 深度测试和模板测试
-
- 深度测试是指将输入片元的深度值与帧缓冲中存储的对应位置片元的深度值进行比较,若输入片元的深度值小则将输入片元送入下一阶段准备覆盖缓冲区中的原片元或与原片元混合,否则丢弃输入片元。
- 模板测试的主要功能为将绘制区域限定在一定的范围内,一般用在湖面倒影、镜像等场合。
- 颜色缓冲混合
-
- 若程序开启了Alpha混合,则根据混合因子将上一阶段送来的片元与帧缓冲中对应位置的片元进行Alpha混合;否则送入的片元将覆盖帧缓冲中对应位置的片元。
- 抖动
-
- 抖动是一种简单的操作,其允许只使用少量的颜色模拟出更宽的颜色显示范围,从而使颜色视觉效果更加地丰富例如,可以使用白色以及黑色模拟出一种过渡的灰色。
- 但使用抖动也是有固有的缺陷的,那就是会损失一部分分辨率,因此对于现在主流的原生颜色就很丰富的显示设备一般是不需要抖动的。
- 当下的一些系统中虽然在API方面支持开启抖动,但这仅仅是为了API的兼容,其可能根本不会去进行实时上的抖动操作。
- 帧缓冲
-
- OpenGL ES中的物体绘制并不是直接在屏幕上进行的,而是预先在帧缓冲中进行绘制,每绘制完一帧在将绘制的结果交换到屏幕上。因此,在每次绘制新的一帧时都需要清除缓冲区中的相关数据,否则有可能产生不正确的绘制效果。
- 同时需要了解的是为了应对不同方面的需要,帧缓冲是由一套组件组成的,主要包括颜色缓冲、深度缓冲以及模板缓冲,
-
- 颜色缓冲用于存储每个片元的颜色值,每个颜色值包括RGBA四个色彩通道,应用程序运行时在屏幕上看到的就是颜色缓冲中的内容。
- 深度缓冲用来存储每个片元的深度值,所谓深度值是指以特定的内部格式来表示的从片元处到观察点的距离。在启用深度测试的情况下,新片元想进入帧缓冲是需要将自己的深度值与帧缓冲中对应位置片元的深度值进行比较,若结果小菜有可能计入缓冲,否则被丢弃。
- 模板缓冲用来存储每个片元的模板值,供模板测试使用。模板测试是几种测试用最为灵活和复杂的一种。