版权声明: https://blog.csdn.net/qq_38351824/article/details/85094213
作者:Sumjess
本次博客内容:
该初始化函数下有以下语句:
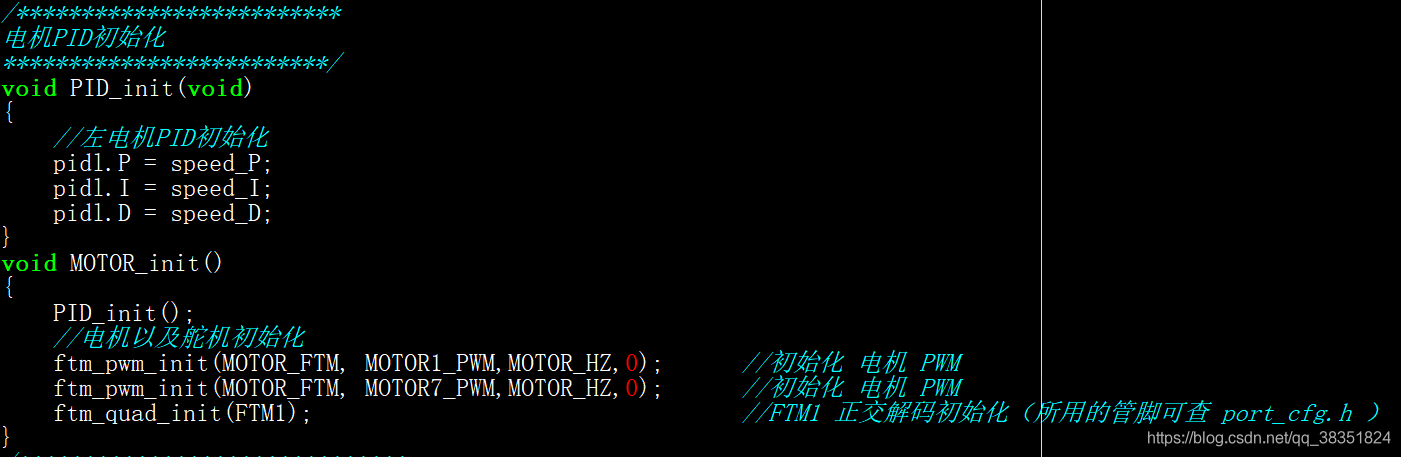
一、ftm_pwm_init(); --- 电机初始化:
直接调用山外的库函数,该函数内部并无修改。
ftm_pwm_init(MOTOR_FTM, MOTOR1_PWM,MOTOR_HZ,0); //初始化 电机 PWM
ftm_pwm_init(MOTOR_FTM, MOTOR7_PWM,MOTOR_HZ,0); //初始化 电机 PWM
![]()
电机频率为:10K
电机精度为:10000u
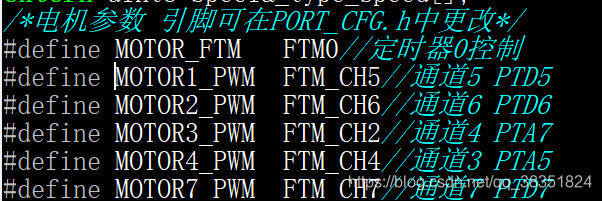
电机使用的引脚为:FTM0_CH5_PIN--PTD5 FTM0_CH7_PIN--PTD7

二、ftm_quad_init(FTM1); --- 编码器初始化:
直接调用山外的库函数,该函数内部并无修改。
编码器精度为:10000u
编码器使用的引脚为:FTM1--PTA8、PTA9

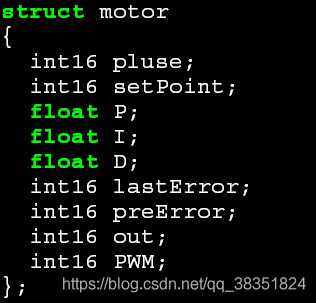
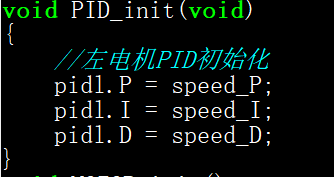
二、PID_init(); --- PID初始化:
电机结构体初始化、赋值:
![]()