一. 有权图
- 带权图即 在边上附加数据

表示方法
- 对于邻接矩阵,只需将原来的true改为边上所附加的数据

- 对于邻接表,则以增加数据的方式表示

- 为了是邻接表和邻接矩阵接口统一, 边上的数据统一封装成Edge类。
- 邻接矩阵中0的地方,则以空指针表示
代码实现
- 邻接矩阵是g[w][v]存放Edge
- 邻接表是g[v]存放Edge
Edge.h
#ifndef INC_01_WEIGHTED_GRAPH_EDGE_H
#define INC_01_WEIGHTED_GRAPH_EDGE_H
#include <iostream>
#include <cassert>
using namespace std;
// 边
template<typename Weight>
class Edge{
private:
int a,b; // 边的两个端点 如果对于有向图, 则ab的先后表示方向
Weight weight; // 边的权值
public:
// 构造函数
Edge(int a, int b, Weight weight){
this->a = a;
this->b = b;
this->weight = weight;
}
// 空的构造函数, 所有的成员变量都取默认值
Edge(){}
~Edge(){}
int v(){ return a;} // 返回第一个顶点
int w(){ return b;} // 返回第二个顶点
Weight wt(){ return weight;} // 返回权值
// 给定一个顶点, 返回另一个顶点
int other(int x){
assert( x == a || x == b );
return x == a ? b : a;
}
// 输出边的信息
friend ostream& operator<<(ostream &os, const Edge &e){
os<<e.a<<"-"<<e.b<<": "<<e.weight;
return os;
}
// 边的大小比较, 是对边的权值的大小比较
bool operator<(Edge<Weight>& e){
return weight < e.wt();
}
bool operator<=(Edge<Weight>& e){
return weight <= e.wt();
}
bool operator>(Edge<Weight>& e){
return weight > e.wt();
}
bool operator>=(Edge<Weight>& e){
return weight >= e.wt();
}
bool operator==(Edge<Weight>& e){
return weight == e.wt();
}
};
#endif //INC_01_WEIGHTED_GRAPH_EDGE_H
ReadGraph.h
#ifndef INC_01_WEIGHTED_GRAPH_READGRAPH_H
#define INC_01_WEIGHTED_GRAPH_READGRAPH_H
#include <iostream>
#include <string>
#include <fstream>
#include <sstream>
#include <cassert>
using namespace std;
// 读取有权图、
template <typename Graph, typename Weight>
class ReadGraph{
public:
// 从文件filename中读取有权图的信息, 存储进图graph中
ReadGraph(Graph &graph, const string &filename){
ifstream file(filename);
string line;
int V, E;
assert(file.is_open());
// 第一行读取图中的节点个数和边的个数
assert( getline(file,line));
stringstream ss(line);
ss >> V >> E;
assert( graph.V() == V );
// 读取每一条边的信息
for( int i = 0 ; i < E ; i ++ ){
assert( getline(file,line));
stringstream ss(line);
int a, b;
Weight w;
ss>>a>>b>>w;
assert( a >= 0 && a < V );
assert( b >= 0 && b < V );
graph.addEdge(a, b, w);
}
}
};
#endif //INC_01_WEIGHTED_GRAPH_READGRAPH_H
DenseGraph.h 稠密图邻接矩阵
#ifndef INC_01_WEIGHTED_GRAPH_DENSEGRAPH_H
#define INC_01_WEIGHTED_GRAPH_DENSEGRAPH_H
#include <iostream>
#include <vector>
#include <cassert>
#include "Edge.h"
using namespace std;
// 稠密图 - 邻接矩阵
template <typename Weight>
class DenseGraph{
private:
int n, m; // 节点数和边数
bool directed; // 是否为有向图
vector<vector<Edge<Weight> *>> g; // 图的具体数据
public:
// 构造函数
DenseGraph( int n , bool directed){
assert( n >= 0 );
this->n = n;
this->m = 0;
this->directed = directed;
// g初始化为n*n的矩阵, 每一个g[i][j]指向一个边的信息, 初始化为NULL
g = vector<vector<Edge<Weight> *>>(n, vector<Edge<Weight> *>(n, NULL));
}
// 析构函数
~DenseGraph(){
for( int i = 0 ; i < n ; i ++ )
for( int j = 0 ; j < n ; j ++ )
if( g[i][j] != NULL )
delete g[i][j];
}
int V(){ return n;} // 返回节点个数
int E(){ return m;} // 返回边的个数
// 向图中添加一个边, 权值为weight
void addEdge( int v, int w , Weight weight ){
assert( v >= 0 && v < n );
assert( w >= 0 && w < n );
// 如果从v到w已经有边, 删除这条边
if( hasEdge( v , w ) ){
delete g[v][w];
if( v != w && !directed ) // 无向图 g[w][v]也删除
delete g[w][v];
m --;
}
g[v][w] = new Edge<Weight>(v, w, weight);
if( v != w && !directed )
g[w][v] = new Edge<Weight>(w, v, weight);
m ++;
}
// 验证图中是否有从v到w的边
bool hasEdge( int v , int w ){
assert( v >= 0 && v < n );
assert( w >= 0 && w < n );
return g[v][w] != NULL;
}
// 显示图的信息
void show(){
for( int i = 0 ; i < n ; i ++ ){
for( int j = 0 ; j < n ; j ++ )
if( g[i][j] )
cout<<g[i][j]->wt()<<"\t";
else
cout<<"NULL\t";
cout<<endl;
}
}
// 邻边迭代器, 传入一个图和一个顶点,
// 迭代在这个图中和这个顶点向连的所有边
class adjIterator{
private:
DenseGraph &G; // 图G的引用
int v;
int index;
public:
// 构造函数
adjIterator(DenseGraph &graph, int v): G(graph){
this->v = v;
this->index = -1; // 索引从-1开始, 因为每次遍历都需要调用一次next()
}
~adjIterator(){}
// 返回图G中与顶点v相连接的第一个边
Edge<Weight>* begin(){
// 索引从-1开始, 因为每次遍历都需要调用一次next()
index = -1;
return next();
}
// 返回图G中与顶点v相连接的下一个边
Edge<Weight>* next(){
// 从当前index开始向后搜索, 直到找到一个g[v][index]为true
for( index += 1 ; index < G.V() ; index ++ )
if( G.g[v][index] )
return G.g[v][index];
// 若没有顶点和v相连接, 则返回NULL
return NULL;
}
// 查看是否已经迭代完了图G中与顶点v相连接的所有边
bool end(){
return index >= G.V();
}
};
};
#endif //INC_01_WEIGHTED_GRAPH_DENSEGRAPH_H
SparseGraph.h 稀疏图邻接表
#ifndef INC_01_WEIGHTED_GRAPH_SPARSEGRAPH_H
#define INC_01_WEIGHTED_GRAPH_SPARSEGRAPH_H
#include <iostream>
#include <vector>
#include <cassert>
#include "Edge.h"
using namespace std;
// 稀疏图 - 邻接表
template<typename Weight>
class SparseGraph{
private:
int n, m; // 节点数和边数
bool directed; // 是否为有向图
vector<vector<Edge<Weight> *> > g; // 图的具体数据
public:
// 构造函数
SparseGraph( int n , bool directed){
assert(n >= 0);
this->n = n;
this->m = 0; // 初始化没有任何边
this->directed = directed;
// g初始化为n个空的vector, 表示每一个g[i]都为空, 即没有任和边
g = vector<vector<Edge<Weight> *> >(n, vector<Edge<Weight> *>());
}
// 析构函数
~SparseGraph(){
for( int i = 0 ; i < n ; i ++ )
for( int j = 0 ; j < g[i].size() ; j ++ )
delete g[i][j];
}
int V(){ return n;} // 返回节点个数
int E(){ return m;} // 返回边的个数
// 向图中添加一个边, 权值为weight
void addEdge( int v, int w , Weight weight){
assert( v >= 0 && v < n );
assert( w >= 0 && w < n );
// 注意, 由于在邻接表的情况, 查找是否有重边需要遍历整个链表
// 我们的程序允许重边的出现
g[v].push_back(new Edge<Weight>(v, w, weight));
if( v != w && !directed )
g[w].push_back(new Edge<Weight>(w, v, weight));
m ++;
}
// 验证图中是否有从v到w的边
bool hasEdge( int v , int w ){
assert( v >= 0 && v < n );
assert( w >= 0 && w < n );
for( int i = 0 ; i < g[v].size() ; i ++ )
if( g[v][i]->other(v) == w )
return true;
return false;
}
// 显示图的信息
void show(){
for( int i = 0 ; i < n ; i ++ ){
cout<<"vertex "<<i<<":\t";
for( int j = 0 ; j < g[i].size() ; j ++ )
cout<<"( to:"<<g[i][j]->w()<<",wt:"<<g[i][j]->wt()<<")\t";
cout<<endl;
}
}
// 邻边迭代器, 传入一个图和一个顶点,
// 迭代在这个图中和这个顶点向连的所有边
class adjIterator{
private:
SparseGraph &G; // 图G的引用
int v;
int index;
public:
// 构造函数
adjIterator(SparseGraph &graph, int v): G(graph){
this->v = v;
this->index = 0;
}
~adjIterator(){}
// 返回图G中与顶点v相连接的第一个边
Edge<Weight>* begin(){
index = 0;
if( G.g[v].size() )
return G.g[v][index];
// 若没有顶点和v相连接, 则返回NULL
return NULL;
}
// 返回图G中与顶点v相连接的下一个边
Edge<Weight>* next(){
index += 1;
if( index < G.g[v].size() )
return G.g[v][index];
return NULL;
}
// 查看是否已经迭代完了图G中与顶点v相连接的所有顶点
bool end(){
return index >= G.g[v].size();
}
};
};
#endif //INC_01_WEIGHTED_GRAPH_SPARSEGRAPH_H
测试文件testG1.txt
8 16
4 5 .35
4 7 .37
5 7 .28
0 7 .16
1 5 .32
0 4 .38
2 3 .17
1 7 .19
0 2 .26
1 2 .36
1 3 .29
2 7 .34
6 2 .40
3 6 .52
6 0 .58
6 4 .93
main.cpp
#include <iostream>
#include <iomanip>
#include "DenseGraph.h"
#include "SparseGraph.h"
#include "ReadGraph.h"
using namespace std;
// 测试有权图和有权图的读取
int main() {
string filename = "testG1.txt";
int V = 8;
cout<<fixed<<setprecision(2);
// Test Weighted Dense Graph
DenseGraph<double> g1 = DenseGraph<double>(V, false);
ReadGraph<DenseGraph<double>,double> readGraph1(g1, filename);
g1.show();
cout<<endl;
// Test Weighted Sparse Graph
SparseGraph<double> g2 = SparseGraph<double>(V, false);
ReadGraph<SparseGraph<double>,double> readGraph2(g2, filename);
g2.show();
cout<<endl;
return 0;
}
二. 最小生成树问题和切分定理
最小生成树
- 一个有v个节点的图, 用v-1条边,连通所有节点, 并且使得这些边上的权重加起来最小
- 针对带权无向图(前置条件)
- 针对连通图(前置条件)

应用
- 电缆布线设计
- 网络设计
- 电路设计
切分定理
- 切分: 把图中的节点分为两部分成为一个切分
- 横切边: 如果一个边的两个端点, 属于切分的不同的两边, 这个边称为横切边
- 切分定理: 给定任意切分, 横切边中权值最小的边必然属于最小生成树
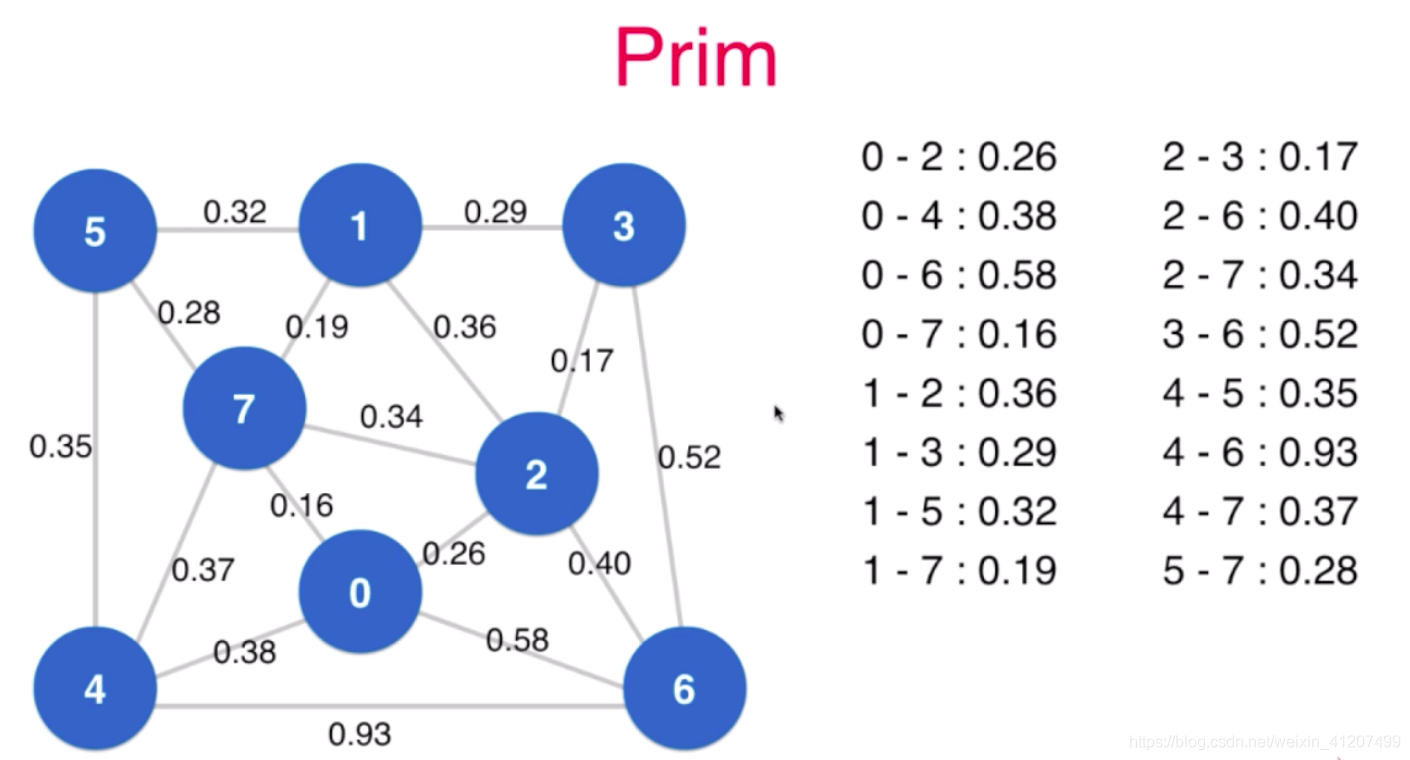
三. Prim算法的第一个实现 (Lazy Prim)
过程描述

1. 取第一个点 0, 0和其他点分为了两部分, 成为一个切分
将横切边 放入最小堆, 得到最短的横切边 0-7, 0-7从最小堆中移除
2. 新切分由 0-7 和其他点 构成,
将横切边放入最小堆(原来在堆中的边不会被丢掉), 得到最短横切边 1-7, 1-7从最小堆中移除
3. 新切分由 0-7-1 和其他点 构成,
将横切边放入最小堆(原来在堆中的边不会被丢掉), 得到最短横切边 0-2, 0-2从最小堆中移除
4. 新切分由 0-7-1-2 和其他点 构成,
将横切边放入最小堆(原来在堆中的边不会被丢掉), 得到最短横切边 2-3, 2-3从最小堆中移除
5. 新切分由 0-7-1-2-3 和其他点 构成,
将横切边放入最小堆(原来在堆中的边不会被丢掉), 得到最短横切边 5-7, 5-7从最小堆中移除
6. 新切分由 0-7-1-2-3-5 和其他点 构成,
将横切边放入最小堆(原来在堆中的边不会被丢掉), 得到堆中最短边 1-3, 1-3不是横切边(通过1-3 在同一侧的切分来判断), 从堆中移除。继续得到最短边1-5, 依然不是横切边, 移除。 得到最短边4-5,是横切边, 从堆中获取后移除。
7. 新切分由 0-7-1-2-3-5-4 和其他点 构成,
重复6的步骤, 得到最短横切边2-6
8. 新切分由 0-7-1-2-3-5-4-6 和其他点 构成(其实此时已经没有其他点),
从堆中找出最短边, 发现都不是横切边。。。直到堆中无数据, 程序结束
代码实现
- LazyPrim.h
#ifndef INC_03_LAZY_PRIM_LAZYPRIMMST_H
#define INC_03_LAZY_PRIM_LAZYPRIMMST_H
#include <iostream>
#include <vector>
#include <cassert>
#include "Edge.h"
#include "MinHeap.h"
using namespace std;
// 使用Prim算法求图的最小生成树
template<typename Graph, typename Weight>
class LazyPrimMST{
private:
Graph &G; // 图的引用
MinHeap<Edge<Weight>> pq; // 最小堆, 算法辅助数据结构
bool *marked; // 标记数组, 在算法运行过程中标记节点i是否已经是是 总是在增加节点的那一边的切分
vector<Edge<Weight>> mst; // 最小生成树所包含的所有边
Weight mstWeight; // 最小生成树的权值
// 访问节点v
void visit(int v){
assert( !marked[v] );
marked[v] = true;
// 将和节点v相连接的所有未访问的边放入最小堆中
typename Graph::adjIterator adj(G,v);
for( Edge<Weight>* e = adj.begin() ; !adj.end() ; e = adj.next() )
if( !marked[e->other(v)] )
pq.insert(*e);
}
public:
// 构造函数, 使用Prim算法求图的最小生成树
LazyPrimMST(Graph &graph):G(graph), pq(MinHeap<Edge<Weight>>(graph.E())){
// 算法初始化
marked = new bool[G.V()];
for( int i = 0 ; i < G.V() ; i ++ )
marked[i] = false;
mst.clear();
// Lazy Prim
visit(0);
while( !pq.isEmpty() ){
// 使用最小堆找出已经访问的边中权值最小的边
Edge<Weight> e = pq.extractMin();
// 如果这条边的两端不构成横切边, 则扔掉这条边
if( marked[e.v()] == marked[e.w()] )
continue;
// 否则, 这条边则应该存在在最小生成树中
mst.push_back( e );
// 访问和这条边连接的还没有被访问过的节点, 放入横切边
if( !marked[e.v()] )
visit( e.v() );
else
visit( e.w() );
}
// 计算最小生成树的权值
mstWeight = mst[0].wt();
for( int i = 1 ; i < mst.size() ; i ++ )
mstWeight += mst[i].wt();
}
// 析构函数
~LazyPrimMST(){
delete[] marked;
}
// 返回最小生成树的所有边
vector<Edge<Weight>> mstEdges(){
return mst;
};
// 返回最小生成树的权值
Weight result(){
return mstWeight;
};
};
#endif //INC_03_LAZY_PRIM_LAZYPRIMMST_H
- 测试main.cpp
#include <iostream>
#include <iomanip>
#include "DenseGraph.h"
#include "SparseGraph.h"
#include "ReadGraph.h"
#include "LazyPrimMST.h"
using namespace std;
// 测试最小生成树算法
int main() {
string filename = "testG1.txt";
int V = 8;
SparseGraph<double> g = SparseGraph<double>(V, false);
ReadGraph<SparseGraph<double>, double> readGraph(g, filename);
// Test Lazy Prim MST
cout<<"Test Lazy Prim MST:"<<endl;
LazyPrimMST<SparseGraph<double>, double> lazyPrimMST(g);
vector<Edge<double>> mst = lazyPrimMST.mstEdges();
for( int i = 0 ; i < mst.size() ; i ++ )
cout<<mst[i]<<endl;
cout<<"The MST weight is: "<<lazyPrimMST.result()<<endl;
cout<<endl;
return 0;
}
四. Prim算法的优化
思路
- 使用最小索引堆,存放每个节点的最小横切边
步骤1. 先取一点, 这里取0, 将和0相连的节点, 在最小索引堆中记录0的横切边,并找到最小横切边0.16
mark标记的 不在寻找最小横切边的范围内
mark
0 1 2 3 4 5 6 7
- - 0.26 - 0.38 - 0.58 0.16
步骤2. 更新切分 0-7 , 遍历和7相连的横切边,更新最小索引堆(7-4比原来的0-4小,更新4为0.37)。 最小边为1的0.19
mark mark
0 1 2 3 4 5 6 7
- 0.19 0.26 - 0.37 0.28 0.58 0.16
步骤3. 更新切分 0-7-1, 遍历和1相连的横切边, 更新最小索引堆(1-3,更新3)。 最小横切边为2的0.26
mark mark mark
0 1 2 3 4 5 6 7
- 0.19 0.26 0.29 0.37 0.28 0.58 0.16
步骤4. 更新切分 0-7-1-2, 遍历和2相连的横切边, 更新最小索引堆(2-3小于1-3,更新为0.17)。 最小横切边为2的0.26
mark mark mark mark
0 1 2 3 4 5 6 7
- 0.19 0.26 0.17 0.37 0.28 0.40 0.16
... 重复以上步骤, 直到全部mark
代码实现
- 最小索引堆 IndexMinHeap.h
#ifndef INC_05_IMPLEMENTATION_OF_OPTIMIZED_PRIM_ALGORITHM_INDEXMINHEAP_H
#define INC_05_IMPLEMENTATION_OF_OPTIMIZED_PRIM_ALGORITHM_INDEXMINHEAP_H
#include <iostream>
#include <algorithm>
#include <cassert>
using namespace std;
// 最小索引堆
template<typename Item>
class IndexMinHeap{
private:
Item *data; // 最小索引堆中的数据
int *indexes; // 最小索引堆中的索引, indexes[x] = i 表示索引i在x的位置
int *reverse; // 最小索引堆中的反向索引, reverse[i] = x 表示索引i在x的位置
int count;
int capacity;
// 索引堆中, 数据之间的比较根据data的大小进行比较, 但实际操作的是索引
void shiftUp( int k ){
while( k > 1 && data[indexes[k/2]] > data[indexes[k]] ){
swap( indexes[k/2] , indexes[k] );
reverse[indexes[k/2]] = k/2;
reverse[indexes[k]] = k;
k /= 2;
}
}
// 索引堆中, 数据之间的比较根据data的大小进行比较, 但实际操作的是索引
void shiftDown( int k ){
while( 2*k <= count ){
int j = 2*k;
if( j + 1 <= count && data[indexes[j]] > data[indexes[j+1]] )
j += 1;
if( data[indexes[k]] <= data[indexes[j]] )
break;
swap( indexes[k] , indexes[j] );
reverse[indexes[k]] = k;
reverse[indexes[j]] = j;
k = j;
}
}
public:
// 构造函数, 构造一个空的索引堆, 可容纳capacity个元素
IndexMinHeap(int capacity){
data = new Item[capacity+1];
indexes = new int[capacity+1];
reverse = new int[capacity+1];
for( int i = 0 ; i <= capacity ; i ++ )
reverse[i] = 0;
count = 0;
this->capacity = capacity;
}
~IndexMinHeap(){
delete[] data;
delete[] indexes;
delete[] reverse;
}
// 返回索引堆中的元素个数
int size(){
return count;
}
// 返回一个布尔值, 表示索引堆中是否为空
bool isEmpty(){
return count == 0;
}
// 向最小索引堆中插入一个新的元素, 新元素的索引为i, 元素为item
// 传入的i对用户而言,是从0索引的
void insert(int index, Item item){
assert( count + 1 <= capacity );
assert( index + 1 >= 1 && index + 1 <= capacity );
index += 1;
data[index] = item;
indexes[count+1] = index;
reverse[index] = count+1;
count++;
shiftUp(count);
}
// 从最小索引堆中取出堆顶元素, 即索引堆中所存储的最小数据
Item extractMin(){
assert( count > 0 );
Item ret = data[indexes[1]];
swap( indexes[1] , indexes[count] );
reverse[indexes[count]] = 0;
reverse[indexes[1]] = 1;
count--;
shiftDown(1);
return ret;
}
// 从最小索引堆中取出堆顶元素的索引
int extractMinIndex(){
assert( count > 0 );
int ret = indexes[1] - 1;
swap( indexes[1] , indexes[count] );
reverse[indexes[count]] = 0;
reverse[indexes[1]] = 1;
count--;
shiftDown(1);
return ret;
}
// 获取最小索引堆中的堆顶元素
Item getMin(){
assert( count > 0 );
return data[indexes[1]];
}
// 获取最小索引堆中的堆顶元素的索引
int getMinIndex(){
assert( count > 0 );
return indexes[1]-1;
}
// 看索引i所在的位置是否存在元素
bool contain( int index ){
return reverse[index+1] != 0;
}
// 获取最小索引堆中索引为i的元素
Item getItem( int index ){
assert( contain(index) );
return data[index+1];
}
// 将最小索引堆中索引为i的元素修改为newItem
void change( int index , Item newItem ){
assert( contain(index) );
index += 1;
data[index] = newItem;
shiftUp( reverse[index] );
shiftDown( reverse[index] );
}
};
#endif //INC_05_IMPLEMENTATION_OF_OPTIMIZED_PRIM_ALGORITHM_INDEXMINHEAP_H
- Prim算法 PrimMST.h
#ifndef INC_05_IMPLEMENTATION_OF_OPTIMIZED_PRIM_ALGORITHM_PRIMMST_H
#define INC_05_IMPLEMENTATION_OF_OPTIMIZED_PRIM_ALGORITHM_PRIMMST_H
#include <iostream>
#include <vector>
#include <cassert>
#include "Edge.h"
#include "IndexMinHeap.h"
using namespace std;
// 使用优化的Prim算法求图的最小生成树
template<typename Graph, typename Weight>
class PrimMST{
private:
Graph &G; // 图的引用
IndexMinHeap<Weight> ipq; // 最小索引堆, 算法辅助数据结构
vector<Edge<Weight>*> edgeTo; // 访问的点所对应的边, 算法辅助数据结构
bool* marked; // 标记数组, 在算法运行过程中标记节点i是否被访问
vector<Edge<Weight>> mst; // 最小生成树所包含的所有边
Weight mstWeight; // 最小生成树的权值
// 访问节点v
void visit(int v){
assert( !marked[v] );
marked[v] = true;
// 将和节点v相连接的未访问的另一端点, 和与之相连接的边, 放入最小堆中
typename Graph::adjIterator adj(G,v);
for( Edge<Weight>* e = adj.begin() ; !adj.end() ; e = adj.next() ){
int w = e->other(v);
// 如果边的另一端点未被访问
if( !marked[w] ){
// 如果从没有考虑过这个端点, 直接将这个端点和与之相连接的边加入索引堆
if( !edgeTo[w] ){
edgeTo[w] = e;
ipq.insert(w, e->wt()); // 最小索引堆中放入 索引和权值
}
// 如果曾经考虑这个端点, 但现在的边比之前考虑的边更短, 则进行替换
else if( e->wt() < edgeTo[w]->wt() ){
edgeTo[w] = e;
ipq.change(w, e->wt());
}
}
}
}
public:
// 构造函数, 使用Prim算法求图的最小生成树
PrimMST(Graph &graph):G(graph), ipq(IndexMinHeap<double>(graph.V())){
assert( graph.E() >= 1 );
// 算法初始化
marked = new bool[G.V()];
for( int i = 0 ; i < G.V() ; i ++ ){
marked[i] = false;
edgeTo.push_back(NULL);
}
mst.clear();
// Prim
visit(0);
while( !ipq.isEmpty() ){
// 使用最小索引堆找出已经访问的边中权值最小的边
// 最小索引堆中存储的是点的索引, 通过点的索引找到相对应的边
int v = ipq.extractMinIndex(); // 从堆中取出 最小权值对应的 节点索引
assert( edgeTo[v] );
mst.push_back( *edgeTo[v] );
visit( v ); // visit切分中加入的新节点
}
mstWeight = mst[0].wt();
for( int i = 1 ; i < mst.size() ; i ++ )
mstWeight += mst[i].wt();
}
~PrimMST(){
delete[] marked;
}
vector<Edge<Weight>> mstEdges(){
return mst;
};
Weight result(){
return mstWeight;
};
};
#endif //INC_05_IMPLEMENTATION_OF_OPTIMIZED_PRIM_ALGORITHM_PRIMMST_H
- 测试代码
// Test Prim MST
cout<<"Test Prim MST:"<<endl;
PrimMST<SparseGraph<double>, double> primMST(g);
mst = primMST.mstEdges();
for( int i = 0 ; i < mst.size() ; i ++ )
cout<<mst[i]<<endl;
cout<<"The MST weight is: "<<primMST.result()<<endl;
cout<<endl;
五. Krusk算法
步骤
- 对所有的边进行从小到大的排序
- 先取最小边
- 接着取下一条边,如果该边与之前的所有取出的边构成了环, 则丢弃这条边
- 重复第3步, 直到遍历过所有的边, 这样就获取了最小生成树
疑惑
- 为什么不用marked[]数组来标记krusk算法中已经标记过的点? 这样不就不用判断是否形成环了?
- 答: 比如1和2连起来了, 3和4连起来了, 现在1 2 3 4都遍历过了, 但它们并没有构成环
- 怎样判断已经取出的边是否构成环?
- 答: 使用UnionFind 并查集这种数据结构来实现, 假如新取出了一条边,有两个顶点a和b, 先判断UnionFind中,a和b是否联通(是否有同一个root), 联通的话就将这条边舍弃,不联通则在并查集中联通a和b两个点
代码实现
Krusk.h
#ifndef INC_06_KRUSKAL_ALGORITHM_KRUSKALMST_H
#define INC_06_KRUSKAL_ALGORITHM_KRUSKALMST_H
#include <iostream>
#include <vector>
#include "MinHeap.h"
#include "UF.h"
#include "Edge.h"
using namespace std;
// Kruskal算法
template <typename Graph, typename Weight>
class KruskalMST{
private:
vector<Edge<Weight>> mst; // 最小生成树所包含的所有边
Weight mstWeight; // 最小生成树的权值
public:
// 构造函数, 使用Kruskal算法计算graph的最小生成树
KruskalMST(Graph &graph){
// 将图中的所有边存放到一个最小堆中
MinHeap<Edge<Weight>> pq( graph.E() ); //利用堆排序
for( int i = 0 ; i < graph.V() ; i ++ ){
typename Graph::adjIterator adj(graph,i);
for( Edge<Weight> *e = adj.begin() ; !adj.end() ; e = adj.next() )
if( e->v() < e->w() ) // 12 这条边 同时也是21这条边, 这样避免重复
pq.insert(*e);
}
// 创建一个并查集, 来查看已经访问的节点的联通情况
UnionFind uf = UnionFind(graph.V()); // 并查集开辟 图的顶点个数的空间节点, 每个节点一开始root都是自己
while( !pq.isEmpty() && mst.size() < graph.V() - 1 ){
// 从最小堆中依次从小到大取出所有的边
Edge<Weight> e = pq.extractMin();
// 如果该边的两个端点是联通的, 说明加入这条边将产生环, 扔掉这条边
if( uf.isConnected( e.v() , e.w() ) )
continue;
// 否则, 将这条边添加进最小生成树, 同时标记边的两个端点联通
mst.push_back( e );
uf.unionElements( e.v() , e.w() );
}
mstWeight = mst[0].wt();
for( int i = 1 ; i < mst.size() ; i ++ )
mstWeight += mst[i].wt();
}
~KruskalMST(){ }
// 返回最小生成树的所有边
vector<Edge<Weight>> mstEdges(){
return mst;
};
// 返回最小生成树的权值
Weight result(){
return mstWeight;
};
};
#endif //INC_06_KRUSKAL_ALGORITHM_KRUSKALMST_H
- 并查集代码 UF.h
#ifndef INC_06_KRUSKAL_ALGORITHM_UF_H
#define INC_06_KRUSKAL_ALGORITHM_UF_H
#include <iostream>
#include <cassert>
using namespace std;
// Quick Union + rank + path compression
class UnionFind{
private:
// rank[i]表示以i为根的集合所表示的树的层数
// 在后续的代码中, 我们并不会维护rank的语意, 也就是rank的值在路径压缩的过程中, 有可能不在是树的层数值
// 这也是我们的rank不叫height或者depth的原因, 他只是作为比较的一个标准
// 关于这个问题,可以参考问答区:http://coding.imooc.com/learn/questiondetail/7287.html
int* rank;
int* parent; // parent[i]表示第i个元素所指向的父节点
int count; // 数据个数
public:
// 构造函数
UnionFind(int count){
parent = new int[count];
rank = new int[count];
this->count = count;
for( int i = 0 ; i < count ; i ++ ){
parent[i] = i;
rank[i] = 1;
}
}
// 析构函数
~UnionFind(){
delete[] parent;
delete[] rank;
}
// 查找过程, 查找元素p所对应的集合编号
// O(h)复杂度, h为树的高度
int find(int p){
assert( p >= 0 && p < count );
// path compression 1
while( p != parent[p] ){
parent[p] = parent[parent[p]];
p = parent[p];
}
return p;
// path compression 2, 递归算法
// if( p != parent[p] )
// parent[p] = find( parent[p] );
// return parent[p];
}
// 查看元素p和元素q是否所属一个集合
// O(h)复杂度, h为树的高度
bool isConnected( int p , int q ){
return find(p) == find(q);
}
// 合并元素p和元素q所属的集合
// O(h)复杂度, h为树的高度
void unionElements(int p, int q){
int pRoot = find(p);
int qRoot = find(q);
if( pRoot == qRoot )
return;
// 根据两个元素所在树的元素个数不同判断合并方向
// 将元素个数少的集合合并到元素个数多的集合上
if( rank[pRoot] < rank[qRoot] ){
parent[pRoot] = qRoot;
}
else if( rank[qRoot] < rank[pRoot]){
parent[qRoot] = pRoot;
}
else{ // rank[pRoot] == rank[qRoot]
parent[pRoot] = qRoot;
rank[qRoot] += 1; // 此时, 我维护rank的值
}
}
};
#endif //INC_06_KRUSKAL_ALGORITHM_UF_H