R-CNN论文学习
Abstract
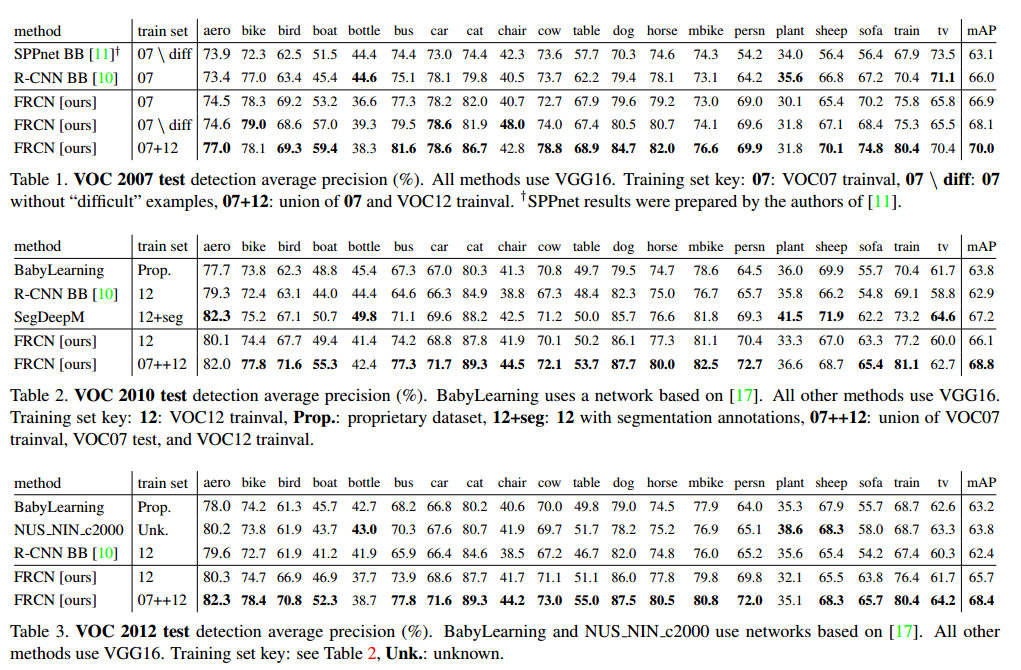
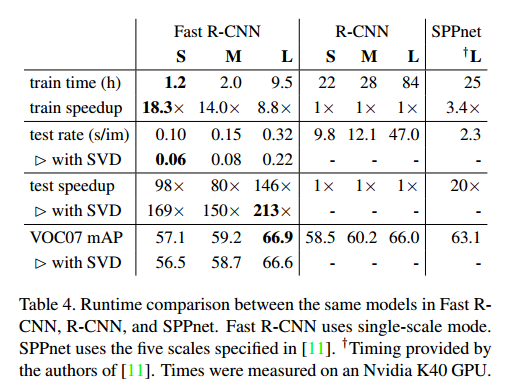
这篇论文提出了针对目标识别的Fast Region-based Convolution Network(Fast R-CNN)方法。Fast R-CNN训练速度要比R-CNN快9倍,测试速度要快213倍,而且在PASCAL VOC2012数据集上的mAP要更高。与SPPnet相比,Fast R-CNN训练速度快3倍,测试速度快10倍,而且更准确。
1. Introduction
目标检测要比图像分类麻烦很多,当前的方法一般都是通过多阶段流程来训练,不仅慢还不优雅。
识别物体需要精确的定位,这就有两个麻烦之处。首先要得到粗糙的候选目标位置(叫proposals);其次,这些候选位置仅是提供了大概的位置,需要精确定位它们。这篇论文提出了一个单阶段训练算法,结合地学习目标候选位置,并优化其空间位置。
1.1 R-CNN 和 SPPnet
R-CNN的问题
- 训练需要多阶段流程:先在目标proposals上微调一个CNN,然后用SVM来做目标检测器。在第三阶段,还要学习bounding-box regressors。
- 训练空间成本和时间成本高:特征需要从每张图像上的目标proposals提取出,然后写到磁盘。
- 目标检测速度慢:用VGG16在GPU上检测,每张图像要47秒。
SPPnet的改进和问题
R-CNN慢因为它需要在每个proposal上都跑一遍CNN,没有共享计算。SPPnet(空间金字塔池化网络)则共享了计算,测试速度快了10到100倍,训练速度也快了3倍。SPPnet先对每张图像计算一个卷积特征图,然后再用特征图里提取的特征向量来对每个proposal做分类。在特征图上max-pooling每个proposal对应的部分,提取特征作为一个固定长度的输出。多个不同大小的输出然后在空间金字塔池化中拼接起来。
SPPnet的问题:它也是多阶段流程训练,需要提取特征,微调网络,训练SVM,最后还要bounding-box regressors. 而且何凯明论文中的SPPnet无法更新空间金字塔池化层之前的卷积层,这也影响了深度网络的准确度。
1.2 本论文的贡献
提出新的训练算法,解决R-CNN和SPPnet的问题,Fast R-CNN有以下几个优势:
- 检测准确度高;
- 单一阶段训练,使用多任务loss;
- 训练可以更新所有的网络层;
- 不需要占用磁盘空间来cache特征;
2. Fast R-CNN结构和训练
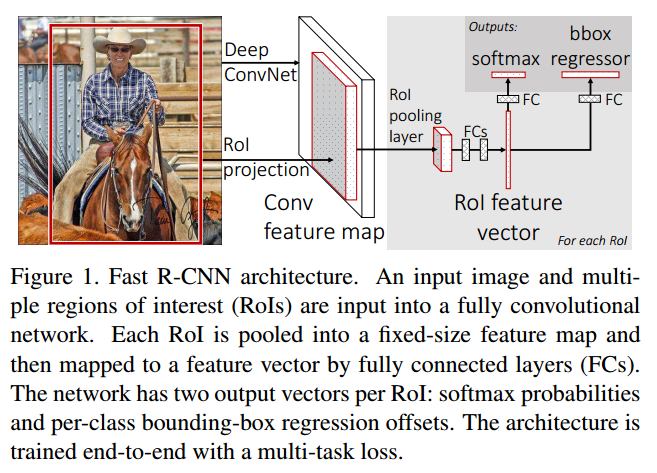
上图就是Fast R-CNN的结构。网络的输入是一整张图像和目标proposals的集合。网络首先通过几个卷积层和max pooling层处理图像,产生一张卷积特征图。然后对于每一个目标proposal,region of interest(RoI)池化层从特征图里提取一个固定长度的特征向量。每个特征向量都被输入进2个sibling全连接层:一个输出(K个类别+1个背景类别的)softmax概率,另一个输出四个实数值,代表bounding-box位置。
2.1 RoI池化层
RoI池化层使用max pooling把RoI内的特征转为固定范围( )的小特征图。RoI是卷积特征图上的一个矩形窗口,由4值的元组(r, c, h, w)决定位置,(r, c)决定左上角位置,(h, w)决定高和宽。RoI max pooling 把 的窗口分割为 个子窗口,每个子窗口大小为 ,然后max-pool每个子窗口,把得到的值放进对应的输出网格中。RoI层其实就是空间金字塔池化层的特例,RoI只有一个金字塔level。
2.2 初始化 Pre-trained 网络
作者通过3个pre-trained ImageNet网络做实验,每个网络有5个max pooling层和5-13个卷积层,还要改动3个地方才能做Fast R-CNN:
- 最后的max pooling层要被RoI池化层替换,而且H和W的值要与第一个全连接层兼容。
- ImangeNet 网络最后的全连接层和softmax层要被替换为2个sibling的全连接层,一个是 个类别,一个是bounding-box regressor.
- 网络要改为接受两个数据输入,一个是图像,一个是图像的RoI。
2.3 Fine-tune
不同于SPPnet,Fast R-CNN整个网络可以被使用反向传播训练是一个极大的优点,而SPPnet无法更新SPP(空间金字塔池化)层以下的层。论文中作者提到SPP层中的感受野非常大,使用BP算法训练时效率低。也就是说,在一个batch训练中,你一开始RoI源于这张图片,而下一个RoI源于另一张图片。如此往复,如果ROI很大的话,这就导致在BP效率会很低。
为了解决这个问题,作者利用特征分享的优势,提出一个更加有效的训练方法:SGD mini-batches分层采样方法。在同一个batch中,为了减少图像使用量,首先选择N张图像,然后从每张图像中选择 个RoI。同一个图像里的RoI,在前向和反向传播过程中共享计算和内存。这样就很好地解决了上述问题。
前面提到了,Fast R-CNN训练是在single-stage中完成,但实际中它包含了:multi-task loss, mini-batch sampling, RoI pooling, BP throungh RoI pooling layers, SGD hyper-parameters.
Multi-task loss
Fast R-CNN网络有两个sibling输出层,第一个输出层针对每个RoI输出离散的概率分布, 在 个类上有 。 是通过softmax计算出来的。第二个sibling层输出bounding-box回归位移, 。
每个训练RoI都被标上其真值类别 和真值bounding-box回归目标 。作者用一个多任务损失函数 ,在每一个标注好的RoI上共同训练分类和bounding-box回归:
是Iverson bracket指标函数,当 ,它等于1,否则为0。对于背景proposal来说, 。
是类 的log loss。
第二个损失任务,对于类 , 定义于bounding-box回归目标的元组(真值)上, ,和一个对于类 的预测元组(预测值), 。
对于bounding-box回归,使用:
中的 是个超参数,控制两个loss tasks的平衡。所有的实验中, 。
Mini-batch sampling
在微调时,每个SGD mini-batch都通过随机选择 张图像构建,然后从每张图片中选择64个RoIs。选取25%的RoIs,这些RoIs与真值bounding-box的IoU(Intersection over union)不少于0.5。这些RoIs构成了前景目标类, 。剩下的RoIs与真值bounding-box的IoU最大也就0.5,它们也就构成了背景目标类, 。
通过RoI池化层反向传播
从这篇借鉴理解RoI池化层:Fast R-CNN论文详解
首先看普通max pooling层如何求导,设
为输入层节点,
为输出层节点,那么损失函数
对输入层节点
的梯度为:
表示输入
节点是否被输出
节点选为最大值输出。
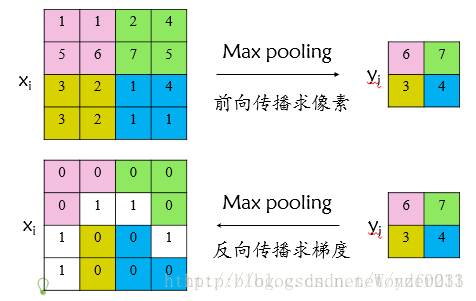
不被选中
有两种可能:xi不在yi范围内,或者xi不是最大值。
若选中
则由链式规则可知损失函数
相对
的梯度等于损失函数
相对
的梯度
对
的梯度(恒等于1),故可得上述所示公式;
对于RoI max pooling层,设
为输入层的节点,
为第
个候选区域的第
个输出节点,一个输入节点可能和多个输出节点相关连,如下图所示,输入节点7和两个候选区域输出节点相关连:
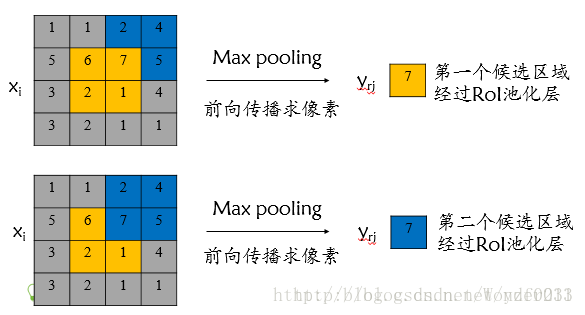
该输入节点7的反向传播如下图所示:
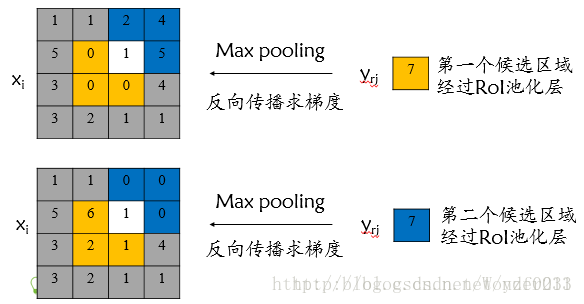
对于不同候选区域,节点7都存在梯度,所以反向传播中损失函数
对输入层节点
的梯度为损失函数
对各个有可能的候选区域
【
被候选区域
的第
个输出节点选为最大值 】输出
梯度的累加,具体如下公式所示:
判决函数
表示第
个节点是否被候选区域
的第
个输出节点选为最大值输出,若是,则由链式规则可知损失函数
相对
的梯度等于损失函数
相对
的梯度
对
的梯度(恒等于1),上图已然解释该输入节点可能会和不同的
有关系,故损失函数
相对
的梯度为求和形式。
SGD 超参数
除了修改增加的层,原有的层参数已经通过预训练方式初始化:
用于分类的全连接层以均值为0、标准差为0.01的高斯分布初始化;
用于回归的全连接层以均值为0、标准差为0.001的高斯分布初始化。
偏置都初始化为0;
针对PASCAL VOC 2007和2012训练集,前30k次迭代全局学习率为0.001,每层权重学习率为1倍,偏置学习率为2倍,后10k次迭代全局学习率更新为0.0001。动量设置为0.9,权重衰减设置为0.0005。
2.4 Scale Invariance
实现尺度不变有两种方式:
- “brute force”(单一尺度,原图)
- “image pyramids”(多尺度方法)
3. Fast R-CNN 检测
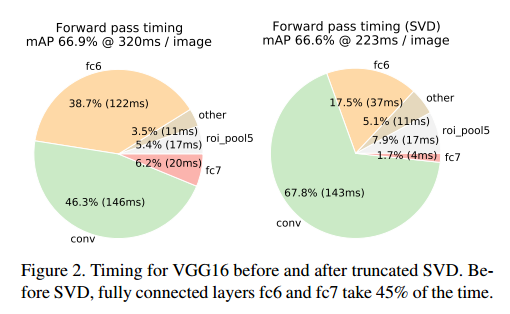
3.1 SVD快速检测
在检测的时候,RoI的数量很大,接近一半的前向时间都花在了全连接层上。全连接层可以通过SVD压缩来加速。
假设有一个层,它的权值矩阵是
形状的
,它可以用SVD分解为
.
是形状为
的矩阵,包含着
的前
个左奇异向量,
是形状为
的对角线矩阵,由
的前
个奇异值组成,
是形状为
的矩阵,对应着
的前
个右奇异向量。SVD方法把参数个数由
减少到
个。为了压缩一个网络,用两个全连接层来代替对应着
的单个全连接层。第一个层使用权值矩阵
,第二个使用
。
4. 实验结果
训练和测试时间
奇异值分解SVD