自动驾驶、智能驾驶成为如今的热门话题,Prescan作为目前应用甚广的一款自动驾驶/智能驾驶仿真软件已获得越来越多汽车工程师的青睐,目前对于PreScan的使用缺乏一套详尽且更贴近实操的教程。本系列教程根据作者在使用过程中遇到的诸多问题总结而来,供大家学习参考。
Prescan场景建立将从以下几个部分讲解:
1.道路
2.路径
3.Actors
4.Infrastructures
1.道路
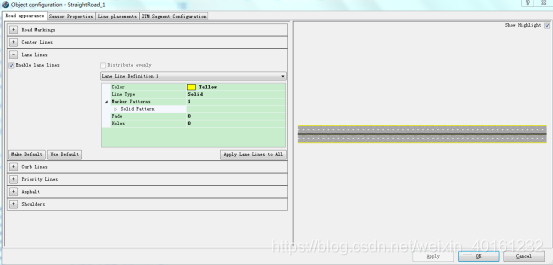
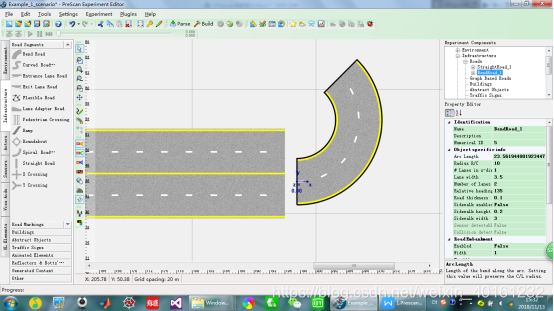
①车道线样式设置
车道线颜色、虚线间隔

②车道线样式copy-paste

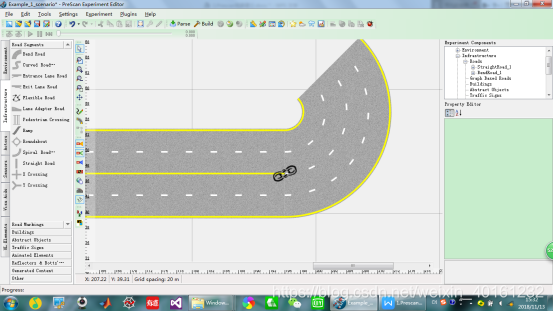
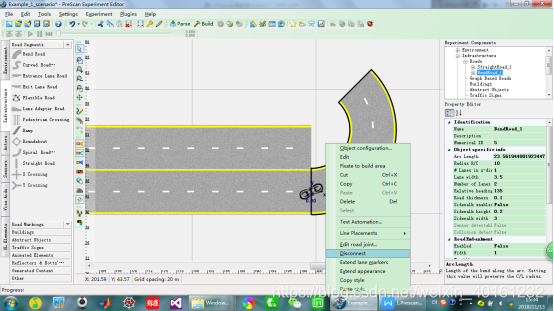
③道路固定、连接、断开
固定之后无法移动、连接在一起的道路会同时移动
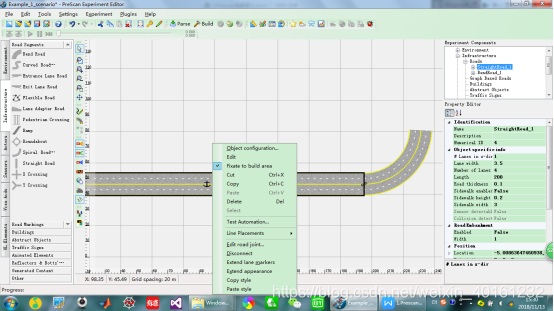
固定不同车道数的道路连在一起会变成与原道路相同车道数
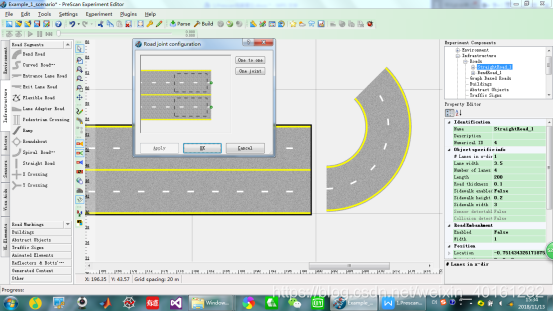
改变车道的road joint configuration可以实现不同车道数的道路连接
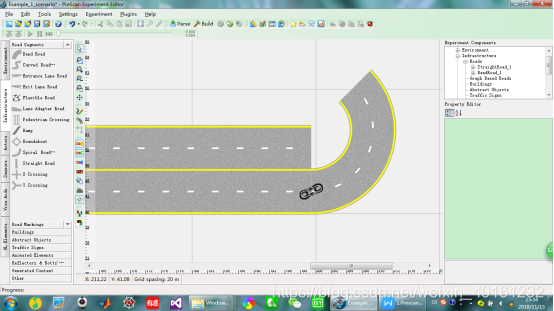
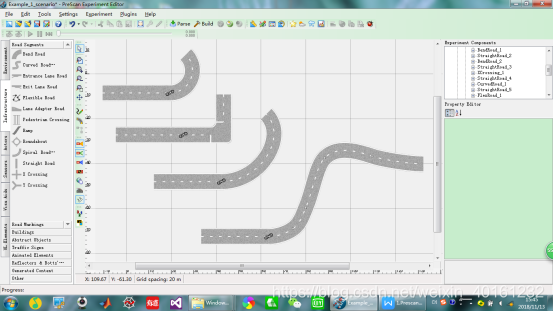
④弯道的多种连接方式
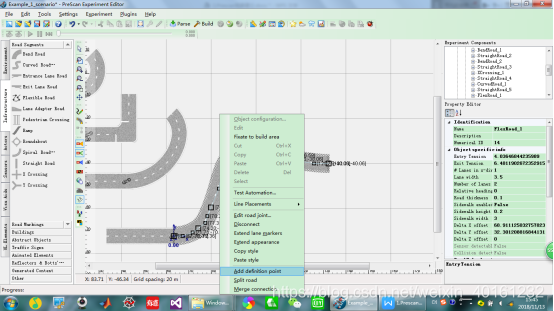
⑤柔性道路的调整方式
add definition point可以将flexible road调整到想要的形状
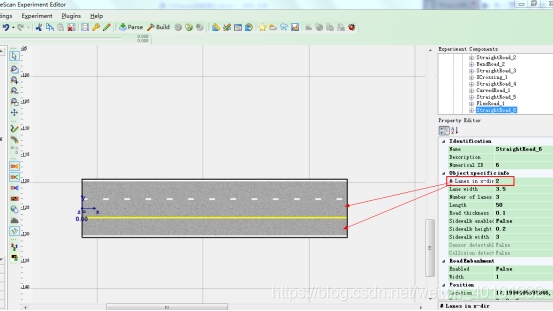
⑥道路的方向
调整Lanes in x-direction (x正向车道的数量)
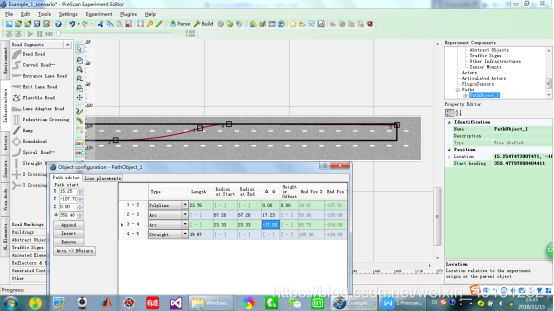
2.路径
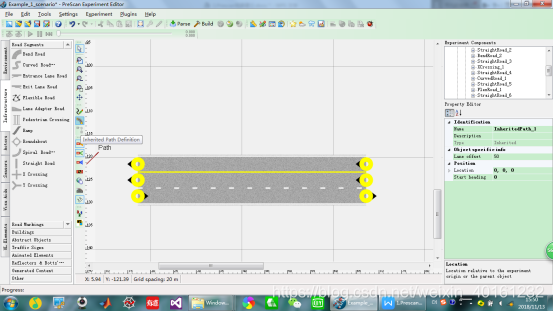
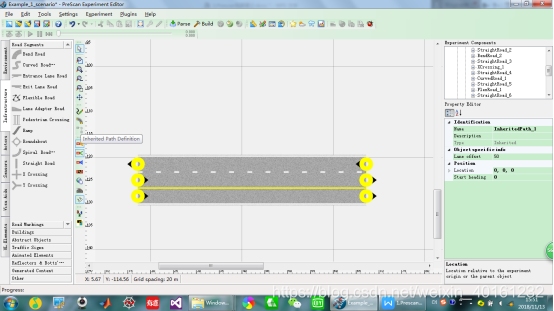
①默认路径、自定义路径
a.根据道路继承的默认路径无法与自定义路径连接
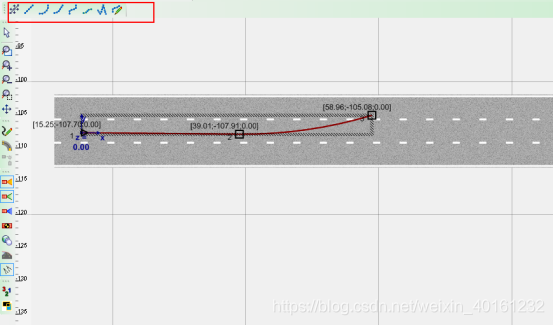
b.双击自定义路径,自动从末尾连接,相切作图
c.每一段的长度和角度可以调整,实现变道路径
d.无法通过路径实现倒车
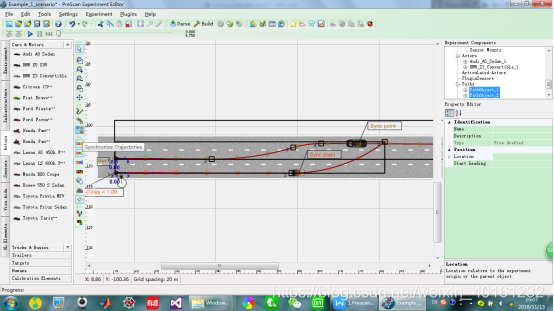
②路径同步
Synchronize Trajectories实现两车在路径的某时刻同步
3.Actors
①车辆导入
Build - Tools - User Library Elements - Basic actor - Add - Refresh and close - UL elements
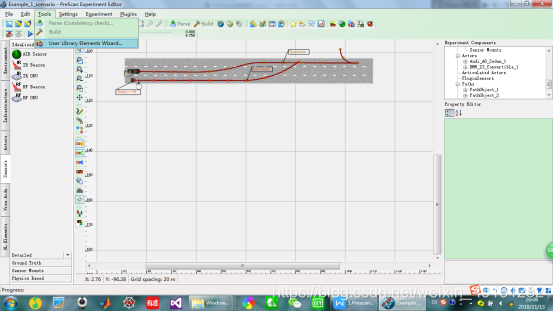
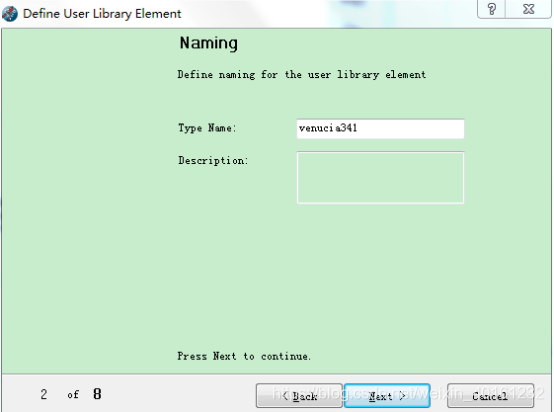

注:路径必须全英文,否则报错!
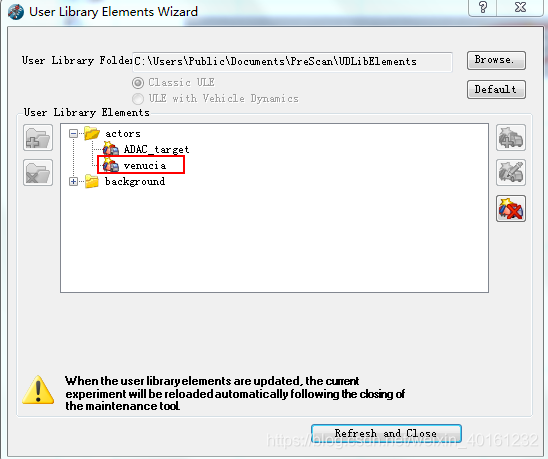
注:refresh and close才会生效
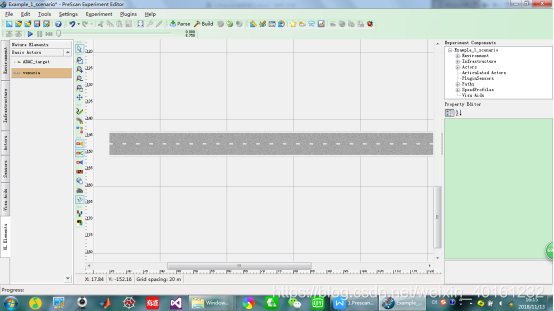
注:导入的actor拥有和内置的actor相同的configuration
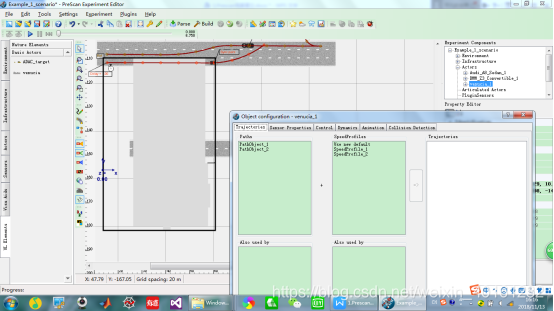
②路径控制
a.初始位置
b.map图
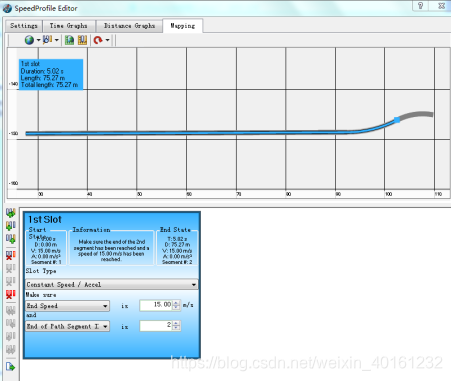
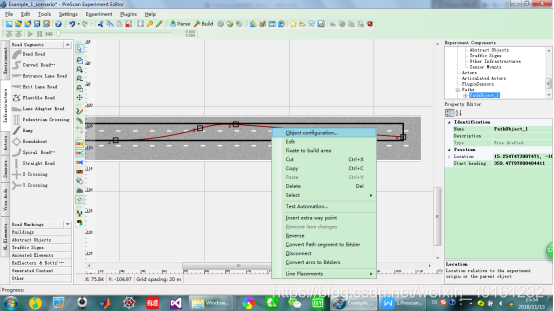
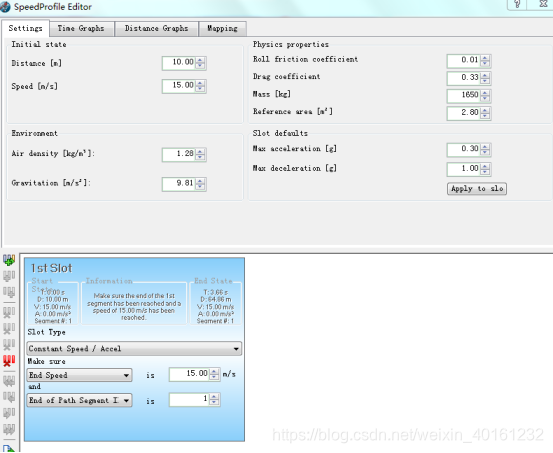
③多条路径的做成和用处
Path加Speedprofiles生成新的Trajectory
注:Segment ID需要重置
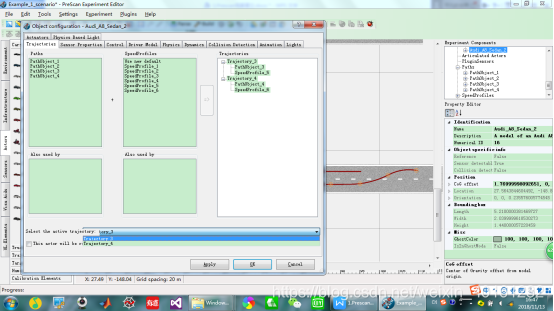
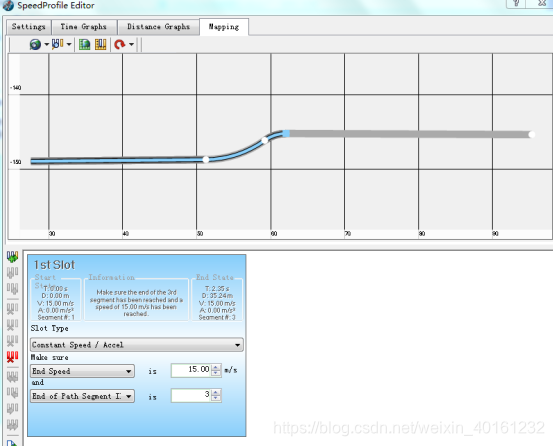
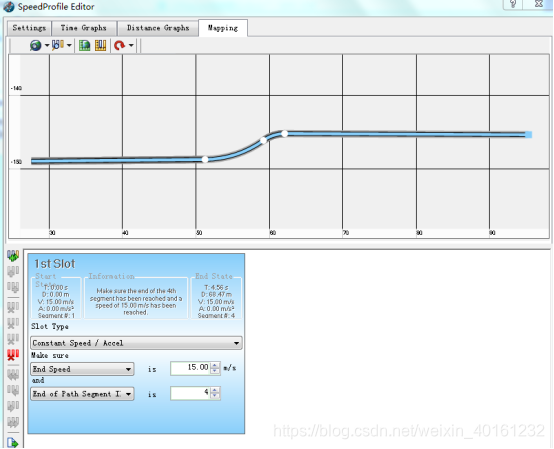
注:Segment ID需要修改
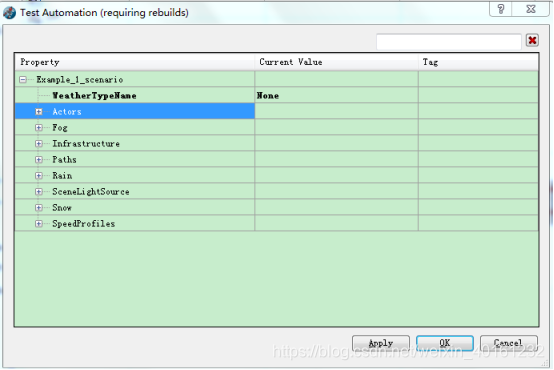
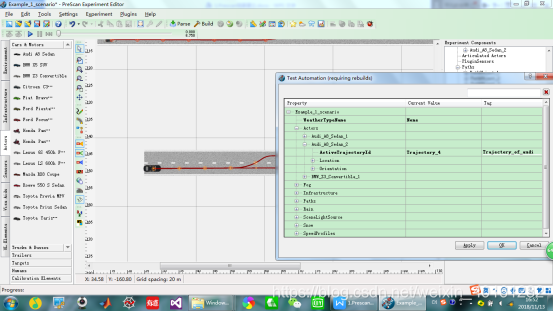
④多路径自动化测试
右键 - Test Automation - 设置Tag名 - 在Matlab TA脚本中添加
4.Infrastructures
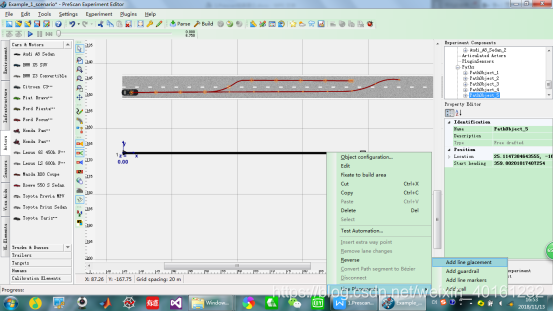
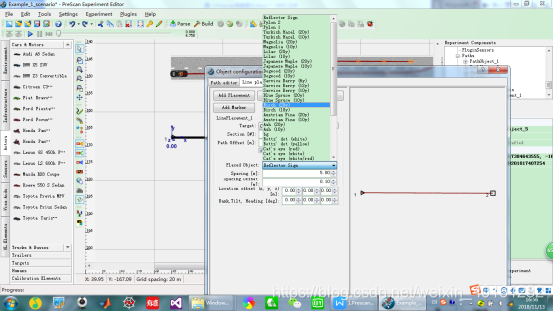
①批量添加树木
手动路径-configuration-add lineplacement-选择树类型-修改间距
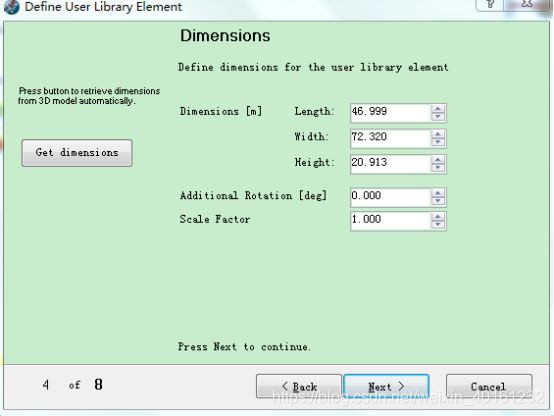
②外部导入建筑物
先build-Tools-UL elements-background-building-调整尺寸、位置、COG等
注:添加了外部element的模型在未添加模型的电脑上打不开,直接报错!

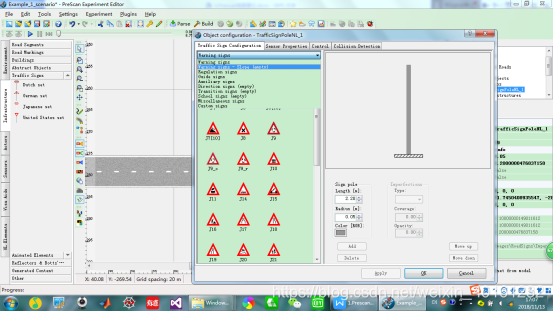
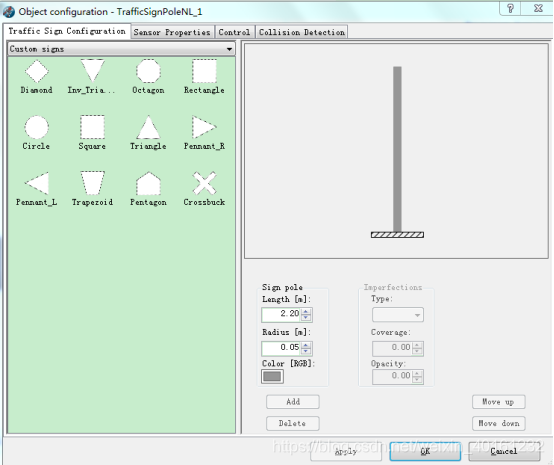
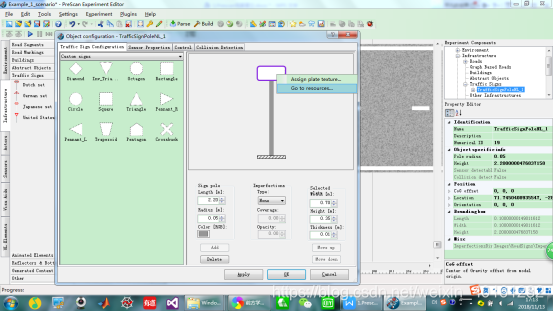
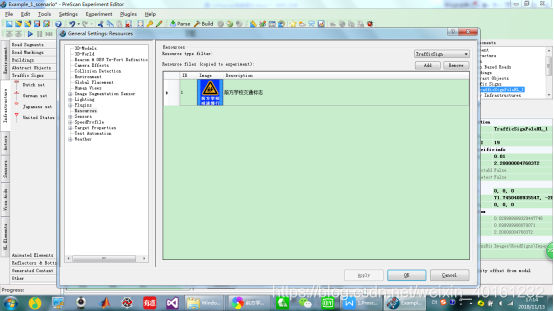
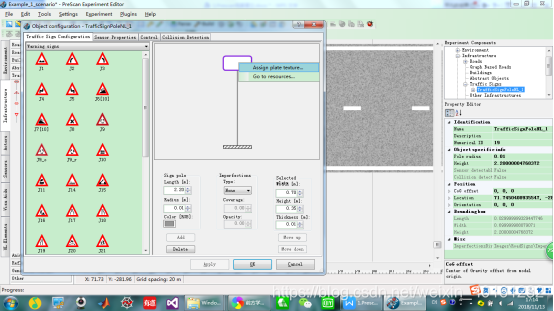
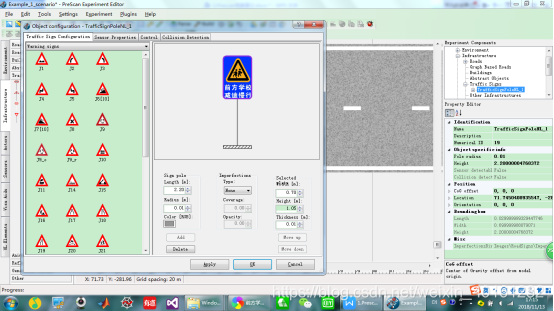
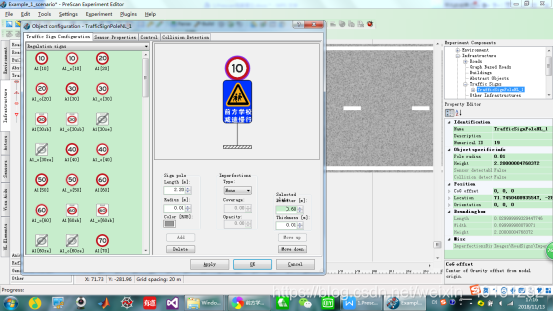
③从外部导入交通标志
traffic sign - custom sign - go to resources - 导入下载的图片 - assign plate texture - add regulation signs - move up
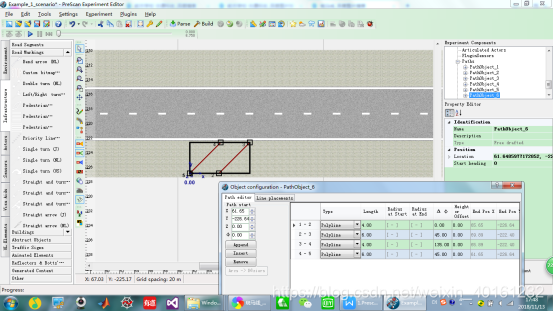
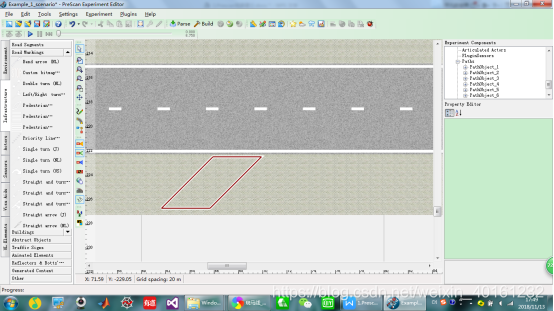
④用path自定义线条(以画斜向车位为例)
自定义path - 修改尺寸和角度 - Add marker - 修改线条类型
注:Path红线在Viewer中不显示