#目录
[TOC]
一、简介
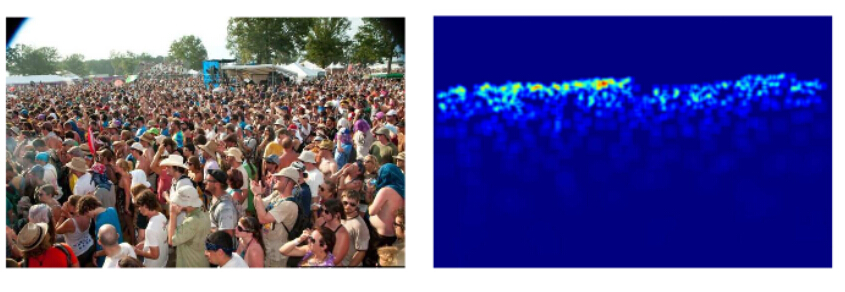
Crowd counting一般以人群图像作为输入,网络回归该图像对应的密度图。以往做法是先在matlab中根据图像的label(人头位置)生成密度图,然后将输入图像及密度图转化为lmdb格式作为caffe datalayer的输入。这样做步骤繁琐,而且lmdb很占存储空间。接下来我们在caffe中添加一个crowd data layer, 直接读入图像,以及密度图的生成均由该层完成。
二、创建CrowdData Layer
1. caffe.proto
- 在ImageDataParameter中添加:
// For crowd_data_layer: the number of pooling layer(stride: 2)
optional uint32 downsamp_times = 17 [default = 2];
// For crowd_data_layer:base standard deviation of gaussian kernel for density map
optional float base_sigma = 18 [default = 1.5];2.crowd_data_layer.hpp
// Create on: 2016/9/19 ShanghaiTech
// Author: Yingying Zhang
#ifndef CAFFE_CROWD_DATA_LAYER_HPP_
#define CAFFE_CROWD_DATA_LAYER_HPP_
#include <string>
#include <utility>
#include <vector>
#include "caffe/blob.hpp"
#include "caffe/data_transformer.hpp"
#include "caffe/internal_thread.hpp"
#include "caffe/layer.hpp"
#include "caffe/layers/base_data_layer.hpp"
#include "caffe/proto/caffe.pb.h"
namespace caffe {
/**
* @brief Provides data and density map to the Net.
* top[0]: crowd image
* top[1]: density map
*/
using namespace cv;
template <typename Dtype>
struct HeadLocation {
Dtype x;
Dtype y;
};
template <typename Dtype>
class CrowdDataLayer : public BasePrefetchingDataLayer<Dtype> {
public:
explicit CrowdDataLayer(const LayerParameter& param)
: BasePrefetchingDataLayer<Dtype>(param) {}
virtual ~CrowdDataLayer();
virtual void DataLayerSetUp(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top);
virtual inline const char* type() const { return "CrowdData"; }
virtual inline int ExactNumBottomBlobs() const { return 0; }
virtual inline int ExactNumTopBlobs() const { return 2; }
protected:
shared_ptr<Caffe::RNG> prefetch_rng_;
virtual void Forward_gpu(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top);
virtual void ReadLocationFromTextFile(const std::string filename);
virtual void ShuffleData();
virtual void load_batch(Batch<Dtype>* batch);
virtual void Transform(const cv::Mat &cv_img, Blob<Dtype> *transformed_blob,
const bool do_mirror, const int offset);
virtual unsigned int PrefetchRand();
virtual Mat ReadCrowdImageToCVMat(const string& filename, const bool is_color);
virtual vector<int> GetImageBlobShape(const Mat& cv_img, const bool is_color);
virtual vector<int> GetDmapBlobShape(const Mat& cv_img, const int ds_times);
virtual Mat fspecial(const int size, const float sigma);
virtual void GetDensityMap(Mat& cv_dmap, const vector<HeadLocation<int> >& head_location,
const float sigma);
int lines_id_;
int downsamp_times_;
Dtype transform_scale_;
Dtype base_sigma_;
vector<std::pair<std::string, std::string> > lines_;
vector<HeadLocation<int> > gt_loc_;
vector<Dtype> mean_values_;
};
} // namespace caffe
#endif // CAFFE_CROWD_DATA_LAYER_HPP_
3.crowd_data_layer.cpp
// Create on: 2016/9/19 ShanghaiTech
// Author: Yingying Zhang
#ifdef USE_OPENCV
#include <fstream>
#include <iostream>
#include <string>
#include <utility>
#include <vector>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include "caffe/data_transformer.hpp"
#include "caffe/layers/base_data_layer.hpp"
#include "caffe/layers/crowd_data_layer.hpp"
#include "caffe/util/benchmark.hpp"
#include "caffe/util/io.hpp"
#include "caffe/util/math_functions.hpp"
#include "caffe/util/rng.hpp"
namespace caffe {
using namespace cv;
template <typename Dtype>
CrowdDataLayer<Dtype>::~CrowdDataLayer<Dtype>() {
this->StopInternalThread();
}
//Read ground truth head location of crowd images
template <typename Dtype>
void CrowdDataLayer<Dtype>::ReadLocationFromTextFile(const std::string filename) {
DLOG(INFO) << "Opening file " << filename;
std::ifstream infile(filename.c_str());
CHECK(infile.good()) << "Failed to open file " << filename;
int num_crowd;
CHECK(infile >> num_crowd);
CHECK_GE(num_crowd, 0) << "Number of crowd must be positive!";
gt_loc_.clear();
gt_loc_.resize(num_crowd);
for (int i = 0; i < num_crowd; i++) {
HeadLocation<int> location;
CHECK(infile >> location.x >> location.y);
CHECK(0 <= location.x && 0 <= location.y);
for (int j = 0; j < downsamp_times_; ++j) {
location.x = location.x / 2;
location.y = location.y / 2;
}
gt_loc_[i] = location;
}
infile.close();
}
// Read crowd image
template <typename Dtype>
Mat CrowdDataLayer<Dtype>::ReadCrowdImageToCVMat(const string& filename,
const bool is_color) {
int cv_read_flag = (is_color ? CV_LOAD_IMAGE_COLOR :
CV_LOAD_IMAGE_GRAYSCALE);
Mat cv_img = imread(filename, cv_read_flag);
if (!cv_img.data) {
LOG(ERROR) << "Could not open or find file " << filename;
}
return cv_img;
}
// Compute initial shape for crowd image
template <typename Dtype>
vector<int> CrowdDataLayer<Dtype>::GetImageBlobShape(const Mat& cv_img,
const bool is_color) {
const int channels = is_color ? 3 : 1;
const int height = cv_img.rows;
const int width = cv_img.cols;
// Check dimensions.
CHECK_GT(height, 0);
CHECK_GT(width, 0);
// Build BlobShape.
vector<int> shape(4);
shape[0] = 1;
shape[1] = channels;
shape[2] = height;
shape[3] = width;
return shape;
}
// Compute initial shape for density map
template <typename Dtype>
vector<int> CrowdDataLayer<Dtype>::GetDmapBlobShape(const Mat& cv_img,
const int ds_times) {
const int channels = 1;
int height = cv_img.rows;
int width = cv_img.cols;
for (int i = 0; i < ds_times; ++i) {
height = height / 2 + (height % 2);
width = width / 2 + (width % 2);
}
// Check dimensions.
CHECK_GT(height, 0);
CHECK_GT(width, 0);
// Build BlobShape.
vector<int> shape(4);
shape[0] = 1;
shape[1] = channels;
shape[2] = height;
shape[3] = width;
return shape;
}
//2D Gaussain kernel, similar to function fspecial in Matlab
//Input size must be odd number
template <typename Dtype>
Mat CrowdDataLayer<Dtype>::fspecial(const int size, const float sigma) {
int r_size = (size-1)/ 2;
Mat kernel(size, size, CV_32F);
float simga_2 = float(2) * sigma * sigma;
for(int i = -r_size; i <= r_size; ++i) {
int h = i + r_size;
for (int j = (-r_size); j <= r_size; ++j) {
int w = j + r_size;
float v = exp(-(static_cast<float>(i*i) + static_cast<float>(j*j)) / simga_2);
kernel.ptr<float>(h)[w] = v;
}
}
Scalar sum_value = sum(kernel);
Mat gaussian_kernel;
kernel.convertTo(gaussian_kernel, CV_32F, (1/sum_value[0]));
return gaussian_kernel;
}
// Generate gaussian kernel based density map
template <typename Dtype>
void CrowdDataLayer<Dtype>::GetDensityMap(Mat& cv_dmap,
const vector<HeadLocation<int> >& head_location,
const float sigma) {
const int k_size = 25;
const int r_size = (k_size - 1) / 2;
Mat gaussian_kernel = fspecial(k_size, sigma);
Mat extend_dmap(cv_dmap.rows + k_size - 1, cv_dmap.cols + k_size - 1, CV_32F, Scalar(0));
const int num_head = head_location.size();
for (int i = 0; i < num_head; ++i) {
int loc_x = head_location[i].x;
int loc_y = head_location[i].y;
CHECK_GE(loc_x, 0) << "invalid head location: x!";
CHECK_GE(loc_y, 0) << "invalid head location: y!";
CHECK_LE(loc_x, cv_dmap.cols) << "invalid head location: x!";
CHECK_LE(loc_y, cv_dmap.rows) << "invalid head location: y!";
Rect location_box;
location_box.x = loc_x;
location_box.y = loc_y;
location_box.width = k_size;
location_box.height = k_size;
Mat kernel_location(extend_dmap, location_box);
kernel_location = kernel_location + gaussian_kernel;
}
Rect dmap_loc;
dmap_loc.x = r_size;
dmap_loc.y = r_size;
dmap_loc.width = cv_dmap.cols;
dmap_loc.height = cv_dmap.rows;
Mat dstroi = extend_dmap(dmap_loc);
dstroi.convertTo(cv_dmap, CV_32F, 1, 0);
}
//Shuffle crowd image and ground truth location.
template <typename Dtype>
void CrowdDataLayer<Dtype>::ShuffleData() {
caffe::rng_t* prefetch_rng =
static_cast<caffe::rng_t*>(prefetch_rng_->generator());
shuffle(lines_.begin(), lines_.end(), prefetch_rng);
}
//Return an unsigned integrate number
template <typename Dtype>
unsigned int CrowdDataLayer<Dtype>::PrefetchRand() {
CHECK(prefetch_rng_);
caffe::rng_t* prefetch_rng =
static_cast<caffe::rng_t*>(prefetch_rng_->generator());
return (*prefetch_rng)();
}
//Convert cvMat to data blob
template <typename Dtype>
void CrowdDataLayer<Dtype>::Transform(const Mat &cv_img,
Blob<Dtype> *transformed_blob, const bool do_mirror,
const int offset) {
// 1. Check dimensions
const int img_channels = cv_img.channels();
const int img_height = cv_img.rows;
const int img_width = cv_img.cols;
const int channels = transformed_blob->channels();
const int height = transformed_blob->height();
const int width = transformed_blob->width();
CHECK_EQ(channels, img_channels);
CHECK_EQ(height, img_height);
CHECK_EQ(width, img_width);
CHECK(cv_img.depth() == CV_8U || cv_img.depth() == CV_32F);
// 2. Copy image (or density map data from cvMat to data blob
Dtype *data = transformed_blob->mutable_cpu_data() + offset;
for (int h = 0; h < img_height; h++) {
const uchar *psrc_u = NULL;
const float *psrc_f = NULL;
if(cv_img.depth() == CV_8U) {
psrc_u = cv_img.ptr<uchar>(h);
}
if(cv_img.depth() == CV_32F) {
psrc_f = cv_img.ptr<float>(h);
}
for (int w = 0; w < img_width; w++) {
for (int c = 0; c < channels; c++) {
if (do_mirror) {
// For crowd image
if(cv_img.depth() == CV_8U)
data[(c * height + h) * width + w] = static_cast<Dtype> (
(psrc_u[(img_width - 1 - w) * channels + c] - mean_values_[c])
* transform_scale_);
// For density map
if (cv_img.depth() == CV_32F)
data[(c * height + h) * width + w] = static_cast<Dtype> (
psrc_f[(img_width - 1 - w) * channels + c]);
} else {
// For crowd image
if(cv_img.depth() == CV_8U)
data[(c * height + h) * width + w] = static_cast<Dtype> (
(psrc_u[w * channels + c] - mean_values_[c])
* transform_scale_);
// For density map
if (cv_img.depth() == CV_32F)
data[(c * height + h) * width + w] = static_cast<Dtype> (
psrc_f[w * channels + c]);
}
}
}
}
}
template <typename Dtype>
void CrowdDataLayer<Dtype>::DataLayerSetUp(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top) {
downsamp_times_ = this->layer_param_.image_data_param().downsamp_times();
base_sigma_ = this->layer_param_.image_data_param().base_sigma();
const bool is_color = this->layer_param_.image_data_param().is_color();
string root_folder = this->layer_param_.image_data_param().root_folder();
// 1. Configure mean values and transform scale
const bool has_mean_values = this->transform_param_.mean_value_size() > 0;
int channel = is_color ? 3 : 1;
if (has_mean_values) {
const int mean_channel = this->transform_param_.mean_value_size();
CHECK(mean_channel == 1 || mean_channel == channel) <<
"Specify either 1 mean_value or as many as channels: " << channel;
if (channel > 1 && mean_channel == 1) {
// Replicate the mean_value for simplicity
for (int c = 0; c < channel; ++c) {
mean_values_.push_back(this->transform_param_.mean_value(0));
}
} else {
for (int c = 0; c < channel; ++c) {
mean_values_.push_back(this->transform_param_.mean_value(c));
}
}
} else {
// If not specify mean value, set to zero
for (int c = 0; c < channel; ++c) {
mean_values_.push_back(Dtype(0));
}
}
transform_scale_ = this->transform_param_.scale();
// 2. Read the image and location file with filenames.
const string& source = this->layer_param_.image_data_param().source();
LOG(INFO) << "Opening file " << source;
std::ifstream infile(source.c_str());
string img_filename;
string loc_filename;
while (infile >> img_filename >> loc_filename) {
lines_.push_back(std::make_pair(img_filename, loc_filename));
}
// 3. Randomly shuffle data.
if (this->layer_param_.image_data_param().shuffle()) {
LOG(INFO) << "Shuffling data";
const unsigned int prefetch_rng_seed = caffe_rng_rand();
prefetch_rng_.reset(new Caffe::RNG(prefetch_rng_seed));
ShuffleData();
}
LOG(INFO) << "A total of " << lines_.size() << " crowd images.";
// 4. Read an crowd image to initialize the top blob.
// 4.1. crowd image.
lines_id_ = 0;
Mat cv_img = ReadCrowdImageToCVMat(root_folder + lines_[lines_id_].first,
is_color);
CHECK(cv_img.data) << "Could not load " << lines_[lines_id_].first;
vector<int> data_shape = GetImageBlobShape(cv_img, is_color);
for (int i = 0; i < this->PREFETCH_COUNT; ++i) {
this->prefetch_[i].data_.Reshape(data_shape);
}
top[0]->Reshape(data_shape);
LOG(INFO) << "output crowd image size: " << top[0]->num() << ","
<< top[0]->channels() << "," << top[0]->height() << ","
<< top[0]->width();
// 4.2. density map.
vector<int> dmap_shape = GetDmapBlobShape(cv_img, downsamp_times_);
for (int i = 0; i < this->PREFETCH_COUNT; ++i) {
this->prefetch_[i].label_.Reshape(dmap_shape);
}
top[1]->Reshape(dmap_shape);
LOG(INFO) << "output density map size: " << top[1]->num() << ","
<< top[1]->channels() << "," << top[1]->height() << ","
<< top[1]->width();
}
// This function is called on prefetch thread.
template <typename Dtype>
void CrowdDataLayer<Dtype>::load_batch(Batch<Dtype>* batch) {
CPUTimer batch_timer;
batch_timer.Start();
double read_time = 0;
double trans_time = 0;
double dmap_time = 0;
CPUTimer timer;
ImageDataParameter image_data_param = this->layer_param_.image_data_param();
const bool is_color = image_data_param.is_color();
const bool mirror = this->transform_param_.mirror();
string root_folder = image_data_param.root_folder();
const unsigned int prefetch_rng_seed = caffe_rng_rand();
prefetch_rng_.reset(new Caffe::RNG(prefetch_rng_seed));
// 1. Reshape each batch according the image read currently.
// Because each crowd image has different size, the batch_size needs
// to be set to one.
// Maybe use batch_size more than one in future.
// 1.1. Reshape crowd image (data) and density map (label) of batch.
int batch_size = 1;
Mat cv_img = ReadCrowdImageToCVMat(root_folder + lines_[lines_id_].first,
is_color);
CHECK(cv_img.data) << "Could not load " << lines_[lines_id_].first;
vector<int> data_shape = GetImageBlobShape(cv_img, is_color);
data_shape[0] = batch_size;
batch->data_.Reshape(data_shape);
vector<int> dmap_shape = GetDmapBlobShape(cv_img, downsamp_times_);
dmap_shape[0] = batch_size;
batch->label_.Reshape(dmap_shape);
// 2. Load crowd images and generate density maps.
const int lines_size = lines_.size();
for (int item_id = 0; item_id < batch_size; ++item_id) {
// 2.1 Load crowd images
timer.Start();
CHECK_GT(lines_size, lines_id_);
Mat cv_img = ReadCrowdImageToCVMat(root_folder + lines_[lines_id_].first,
is_color);
CHECK(cv_img.data) << "Could not load " << lines_[lines_id_].first;
read_time += timer.MicroSeconds();
// 2.2 Apply transformations (mirror,maybe crop in future...) to the image
timer.Start();
int data_offset = item_id * (batch->data_.count(1));
bool do_mirror = mirror; // for validation and testing
if (this->phase_ == TRAIN) { // for training, do mirror jittering
do_mirror = mirror && PrefetchRand() % 2;
}
Transform(cv_img, &batch->data_, do_mirror, data_offset);
trans_time += timer.MicroSeconds();
// 2.3 Generate density map
timer.Start();
int dmap_offset = item_id * (batch->label_.count(1));
Mat dmap(dmap_shape[2], dmap_shape[3], CV_32F, Scalar(0));
ReadLocationFromTextFile(root_folder + lines_[lines_id_].second);
GetDensityMap(dmap, gt_loc_, base_sigma_);
Transform(dmap, &batch->label_, do_mirror, dmap_offset);
// 2.4 Go to the next iter
lines_id_++;
if (lines_id_ >= lines_size) {
// We have reached the end. Restart from the first.
DLOG(INFO) << "Restarting data prefetching from start.";
lines_id_ = 0;
if (this->layer_param_.image_data_param().shuffle()) {
ShuffleData();
}
}
}
batch_timer.Stop();
DLOG(INFO) << "Prefetch batch: " << batch_timer.MilliSeconds() << " ms.";
DLOG(INFO) << " Read time: " << read_time / 1000 << " ms.";
DLOG(INFO) << "Transform time: " << trans_time / 1000 << " ms.";
DLOG(INFO) << "Generate Density map: " << dmap_time / 1000 << "ms.";
}
INSTANTIATE_CLASS(CrowdDataLayer);
REGISTER_LAYER_CLASS(CrowdData);
} // namespace caffe
#endif // USE_OPENCV
4.crowd_data_layer.cu
// Create on: 2016/9/19 ShanghaiTech
// Author: Yingying Zhang
#include <vector>
#include "caffe/layers/crowd_data_layer.hpp"
namespace caffe {
template <typename Dtype>
void CrowdDataLayer<Dtype>::Forward_gpu(
const vector<Blob<Dtype>*>& bottom, const vector<Blob<Dtype>*>& top) {
Batch<Dtype>* batch = this->prefetch_full_.pop("Data layer prefetch queue empty");
// 1. Reshape to loaded crowd image and copy it to top[0].
top[0]->ReshapeLike(batch->data_);
caffe_copy(batch->data_.count(), batch->data_.gpu_data(),
top[0]->mutable_gpu_data());
// 2. Reshape to loaded density map and copy it to top[1].
top[1]->ReshapeLike(batch->label_);
caffe_copy(batch->label_.count(), batch->label_.gpu_data(),
top[1]->mutable_gpu_data());
DLOG(INFO) << "Prefetch copied";
// 3. Ensure the copy is synchronous wrt the host, so that the next batch isn't
// copied in meanwhile.
CUDA_CHECK(cudaStreamSynchronize(cudaStreamDefault));
this->prefetch_free_.push(batch);
}
INSTANTIATE_LAYER_GPU_FORWARD(CrowdDataLayer);
} // namespace caffe
PS: