版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/kiti1013/article/details/50589660
0.第一次打板 没有注意重心问题,由于720电机略无力,在PID参数上出现了较严重问题,最后飞行效果也一般。当然另一方面也由于简单的采用了单级PID。
1.在调试过程中,出现飞行中单片机意外复位,有时无法下载的现象,反复排查发现,复位脚电容有问题。
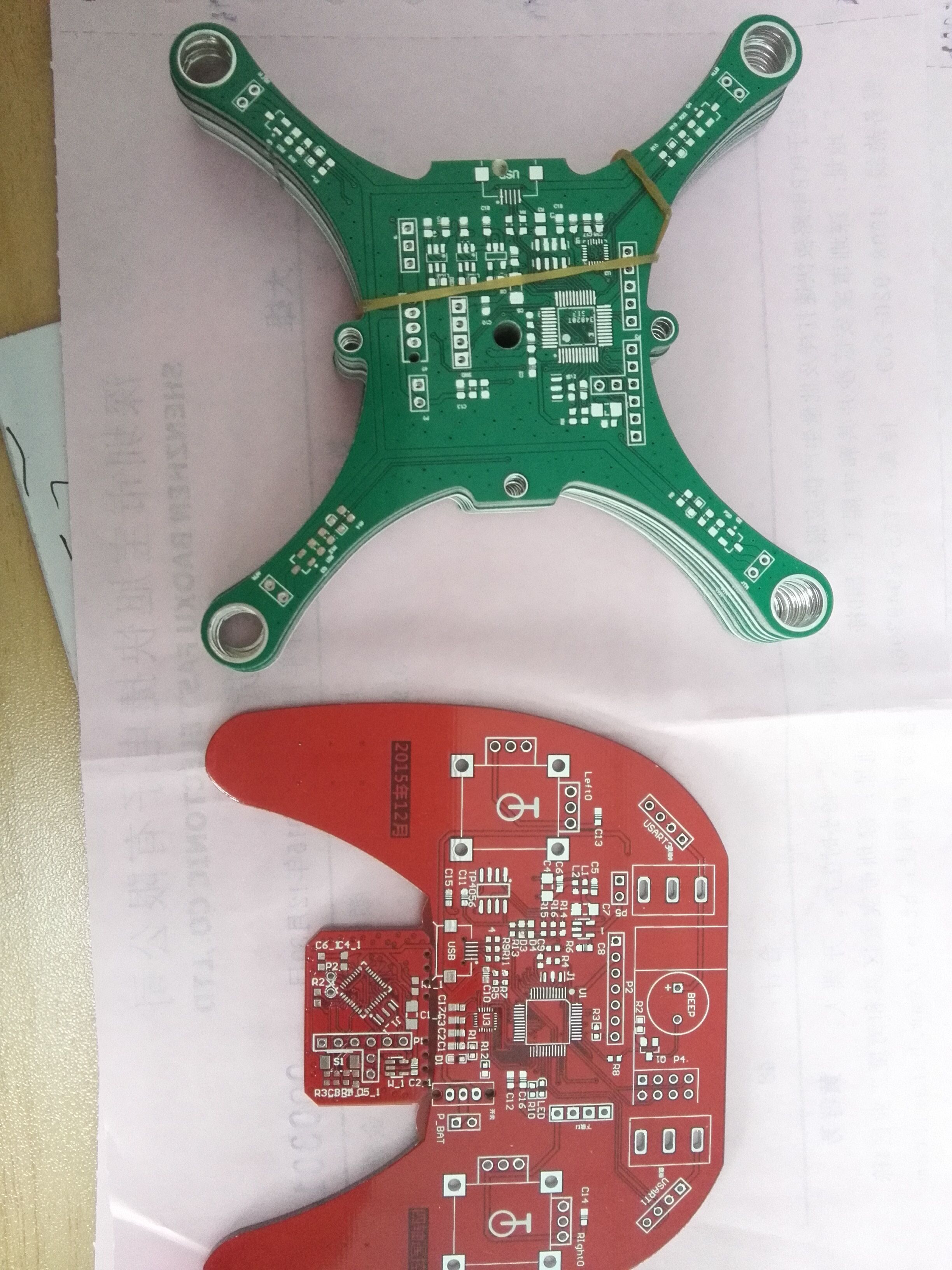
2.第一版硬件基本上完全参照了顾老板团队的无穷四轴,调试中发现,没有合适的上传数据端口,无法便捷的通过上位机调试,下一版硬件加入一路NRF数传。
3.算法 目前姿态解算以及滤波算法是四元数+互补滤波,控制算法是单级PID。下一版改成EKF+DCM(参考APM)以及串级PID。未来尝试一下L1自适应控制算法。
4.硬件成本问题。无穷团队采用了3.7V锂电升压5V转3.3的方案,好处就是3.3V供电稳定。但是一颗3.7V升压5V芯片要二元左右,下一版改成使用低压差的ldo,直接从3.7V降压到3.3V,一颗芯片大概二毛钱左右。