本文修改日志:
2018.05.01:修改源代码170行(添加float),double RateVariation = float(rand()%100)/100;
一、前言
【旅行商问题】旅行商问题(TravelingSalesmanProblem,TSP)是一个经典的组合优化问题。经典的TSP可以描述为:一个商品推销员要去若干个城市推销商品,该推销员从一个城市出发,需要经过所有城市后,回到出发地。应如何选择行进路线,以使总的行程最短。从图论的角度来看,该问题实质是在一个带权完全无向图中,找一个权值最小的Hamilton回路。由于该问题的可行解是所有顶点的全排列,随着顶点数的增加,会产生组合爆炸,它是一个NP完全问题。由于其在交通运输、电路板线路设计以及物流配送等领域内有着广泛的应用,国内外学者对其进行了大量的研究。早期的研究者使用精确算法求解该问题,常用的方法包括:分枝定界法、线性规划法、动态规划法等。但是,随着问题规模的增大,精确算法将变得无能为力,因此,在后来的研究中,国内外学者重点使用近似算法或启发式算法,主要有遗传算法、模拟退火法、蚁群算法、禁忌搜索算法、贪婪算法和神经网络等。【百度百科】
旅行商求解系列:
-------------------------------------------------------------------------------------------------
(1)TSP_旅行商问题- 蛮力法( 深度遍历优先算法DFS )
(2)TSP_旅行商问题- 动态规划
(3)TSP_旅行商问题- 模拟退火算法
(4)TSP_旅行商问题- 遗传算法
(5)TSP_旅行商问题- 粒子群算法
(6)TSP_旅行商问题- 神经网络
-------------------------------------------------------------------------------------------------
二、本文概要
三、遗传算法
1. 遗传算法简介(GA)
2. 用遗传算法解决旅行商问题(GA solve the TSP problem)
3. 遗传算法核心思想
- 参数的设置,确定个体的编码方式(二进制或者其他)
- 初始随机解的生成
- 选择算子:选择父代的策略(轮盘赌策略)
- 繁殖:交叉两个父代并产生新个体(TSP问题的编码,需要解决路径冲突问题,即保证每个城市有且仅遍历一次)
- 变异:对新个体进行变异操作
- 竞争(更新种群):精英保留策略或者自然选择
4. 本文使用的数据结构以及GA相关参数
#define CITY_NUM 150 // TSP_城市个数
#define GROUP_NUM 30 // 群体规模
#define SON_NUM 32 // 产生儿子的个数 SON_NUM = GROUP_NUM + 2
const double P_INHERIATANCE = 0.01; // 变异概率
const double P_COPULATION = 0.8; // 杂交概率
const int ITERATION_NUM = 1500; // 遗传次数(迭代次数)
const double MAX_INT = 9999999.0;
typedef struct{
int vex_num, arc_num; // 顶点数 边数
int vexs[CITY_NUM]; // 顶点向量
double arcs[CITY_NUM][CITY_NUM]; // 邻接矩阵
}Graph;
typedef struct{
double length_path;
int path[CITY_NUM];
double P_Reproduction;
}TSP_solution;四、程序流程
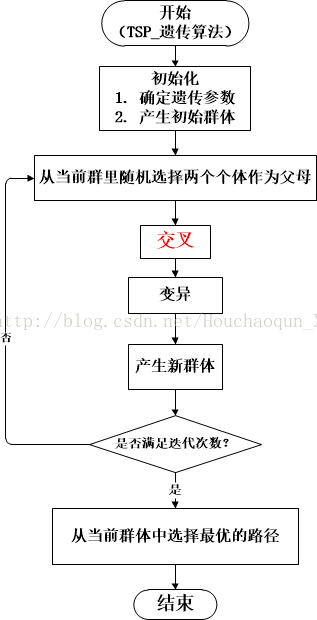
1. 遗传算法总体设计
- 步骤一、初始化参数;
- 步骤二、随机产生一组初始个体构成的初始种群,并评价每一个个体的适配值(路径长度决定);
- 步骤三、判断算法的收敛准则是否满足(此处为迭代次数)。若满足输出搜索结果;否则执行[4-8]步骤;
- 步骤四、执行选择操作(随机选择两个种群个体),使用【轮盘赌选择】思想,每次按照概率大小随机返回当前群体中的某个个体的下标;
- 步骤五、按杂交概率const double P_COPULATION = 0.8;执行交叉操作;
- 步骤六、对子群Son_solution[]进行变异处理,产生随机数RateVariation,小于变异概率P_INHERIATANCE时,进行变异处理(随机交换两个城市的位置);
- 步骤七、更新Son_solution[]的路程和概率Calc_Probablity(G, total_length);
- 步骤八、采用“父子混合选择”更新群体(精英保留策略);
- 步骤九、返回步骤(2)判断是否进行下一次迭代;
- 本算法的结束准则是根据指定了的迭代次数,当算法达到迭代次数时,算法结束,输出当前的最优解;
- 在根据适配值计算并选择的时候,记录下来的当前最优值,在变异后加入跟新的群体,保证新的迭代循环中TSP解越来越好(不会变差);
- 在选择的一种操作是拿最优的K个替换最差的K个子个体,本例是按适配值选择,并使群体数目变少,当每次变异操作后,产生随机路径补充群体是群体数目不变,再次循环,一定程度上防止因初始群体的选择问题而陷入局部最优。
2. 总体流程图
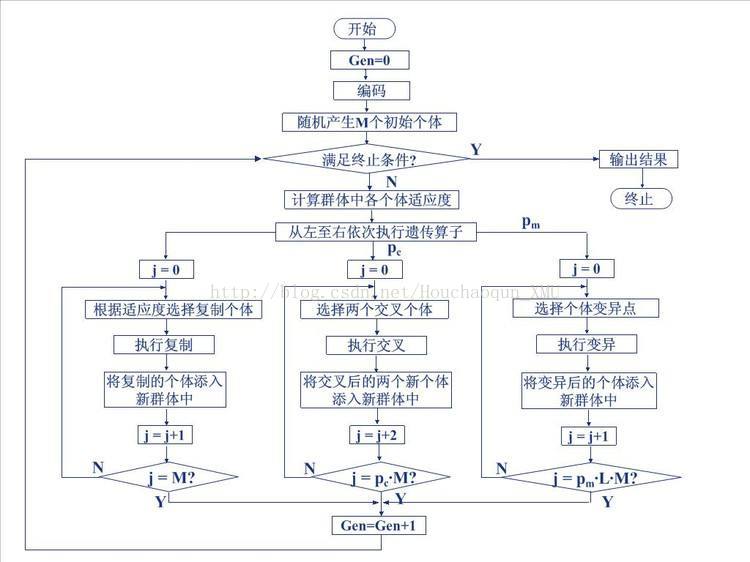
3. 详细流程图
五、程序开发 - 遗传算法解决TSP问题
1. 随机生成初始种群:
void InitialGroup(Graph G){
cout<<"----------------------【遗传算法参数】-----------------------"<<endl;
cout<<"【城市个数】 CITY_NUM ="<< CITY_NUM <<endl;
cout<<"【群体规模】 GROUP_NUM = "<< GROUP_NUM <<endl;
cout<<"【子代规模】 SON_NUM = "<< SON_NUM <<endl;
cout<<"【变异概率】 P_INHERIATANCE = "<< P_INHERIATANCE <<endl;
cout<<"【杂交概率】 P_COPULATION = "<< P_COPULATION <<endl;
cout<<"【迭代次数】 ITERATION_NUM = "<< ITERATION_NUM <<endl;
double total_length = 0.0;
for(int i = 0;i < GROUP_NUM; i++){
for (int j = 0;j < G.vex_num; j++)
{
TSP_Groups[i].path[j] = G.vexs[j];
}
random_shuffle(TSP_Groups[i].path + 1, TSP_Groups[i].path + G.vex_num);
if (Check_path(G, TSP_Groups[i]))
{
TSP_Groups[i].length_path = CalculateLength(G, TSP_Groups[i]);
total_length += TSP_Groups[i].length_path;
}else{
cout<<"【error!城市路径产生重复城市!】"<<endl;
TSP_Groups[i].length_path = MAX_INT;
TSP_Groups[i].P_Reproduction = 0;
}
}
Calc_Probablity(G, total_length);
TSP_Evaluate(G);
}2. 遗传算法函数:
void TSP_Evolution(Graph G){
/* */
int iter = 0;
while(iter < ITERATION_NUM){
// cout<<"***********************【第次"<<(iter + 1)<<"迭代】*************************"<<endl;
// 1. 选择
int Father_index = Evo_Select(G);
int Mother_index = Evo_Select(G);
while (Mother_index == Father_index)
{
// 防止Father和Mother都是同一个个体 -> 自交( 父母为同一个个体时, 母亲重新选择, 直到父母为不同的个体为止 )
cout<<"Warning!【Father_index = Mother_index】"<<endl;
Mother_index = Evo_Select(G);
}
// TSP_Groups[]为当前总群
TSP_solution Father = TSP_Groups[Father_index];
TSP_solution Mother = TSP_Groups[Mother_index];
// 2. 交叉, 存储在全局变脸 Son_solution[] 数组 - 通过M次杂交, 产生2M个新个体, 2M >= GROUP_NUM
int M = GROUP_NUM - GROUP_NUM/2;
Length_SonSoliton = 0; // 遗传产生的个体个数, 置零重新累加
while(M){
double Is_COPULATION = ((rand()%100 + 0.0) / 100);
if (Is_COPULATION > P_COPULATION)
{
// cout<<"[ 这两个染色体不进行杂交 ]Is_COPULATION = "<<Is_COPULATION<<endl;
}else{
// 杂交, 将结果存储于遗传个体总群,全局变量Son_solution[]
Evo_Cross(G, Father, Mother);
M--;
}
}
// 3. 变异:针对 Son_solution[]
double total_length = 0.0; // 更新新个体的概率
for (int IndexVariation = 0;IndexVariation < Length_SonSoliton; IndexVariation++)
{
double RateVariation = float(rand()%100) / 100;
// 产生的随机数小于变异概率 则该个体进行变异
if (RateVariation < P_INHERIATANCE)
{
Evo_Variation(G, IndexVariation);
}
// 经过变异处理后 判断是否满足TSP路径条件
if (!Check_path(G, Son_solution[IndexVariation]))
{
cout<<"【Error! 路径有重复!】"<<endl;
}
// 产生新个体, 计算新路径和新概率
Son_solution[IndexVariation].length_path = CalculateLength(G, Son_solution[IndexVariation]);
total_length += Son_solution[IndexVariation].length_path;
}
Calc_Probablity(G, total_length);
// 4. 更新群体
// 参与对象:父代 + 遗传的子代
Evo_UpdateGroup(G);
iter++;
}
}3. 选择算子:
// 选择
/*
输入:当前总群
输出:按照一个评价, 随机从当前总群筛选出杂交对象, 本程序每次返回一个个体
选择方案:比例选择规则, [轮盘赌选择]
机制:反映在对父代种群中每一个体所赋予的允许繁殖概率及其从2M个中间个体中如何选择子代种群的机制上!
*/
/*
[轮盘赌选择] - 轮盘赌选择是从染色体群体中选择一些成员的方法,被选中的机率和它们的适应性分数成比例,染色体的适应性分数愈高,被选中的概率也愈多.
1. 随机产生一个概率 selection_P
2. [概率分布函数]声明变量 distribution_P = 0, 对于每个个体, 依次累加个体的概率到distribution_P上, 判断当前随机概率selection_P是否小于distribution_P, 若是则中该染色体, 结束循环
*/
int Evo_Select(Graph G){
double selection_P = ((rand()%100 + 0.0) / 100);
// cout<<"selection_P = "<<selection_P<<endl;
double distribution_P = 0.0;
for (int i = 0; i < GROUP_NUM; i++)
{
distribution_P += TSP_Groups[i].P_Reproduction;
if (selection_P < distribution_P)
{
return i;
}
}
cout<<"【ERROR!】Evo_Select() 轮盘赌选择有误..."<<endl;
return 0;
}4. 繁殖(交叉操作):
// 交叉
/*
输入:[TSP_Father , TSP_Mother]两个个体作为父母, 进行杂交
输出:通过杂交产生新个体(遗传算法产生2个新个体, 演化算法产生1个新个体)
杂交方案:[父子混合选择][自然选择 - 父母不参与竞争]
-- [演化策略]所使用的杂交算子是从两个个体生成一个个体的操作
-- [遗传算法]生成两个新个体。常见的“中间杂交”(intermediate crossover)及“随机杂交”(random crossover)等!
*/
/*
TSP_杂交具体方法:
1. 随机选取两个交叉点i和j,记为 Father_Cross 和 Mother_Cross
2. 将两交叉点中间的基因段互换
3. 分别对Father和Mother的路径进行冲突处理:
-- 以Father为例, 保持Father_Cross基因段不变, 基因段以外的部分与Father_Cross基因段冲突的城市, 用Father_Cross和Mother_Cross对应的位置去互换, 直到没有冲突.
-- 冲突城市的确定: Father_Cross 和 Mother_Cross去补集,存放于数组 Conflict[] 中.
*/
void Evo_Cross(Graph G, TSP_solution TSP_Father, TSP_solution TSP_Mother){
// 杂交过程:随机产生杂交的位置, 保证 IndexCross_i < IndexCross_j【全局变量】
IndexCross_i = rand() % (CITY_NUM - 1) + 1; // 不能取到起始城市
IndexCross_j = rand() % (CITY_NUM - 1) + 1; //
if (IndexCross_i > IndexCross_j)
{
int temp = IndexCross_i;
IndexCross_i = IndexCross_j;
IndexCross_j = temp;
}
if (IndexCross_j == CITY_NUM || IndexCross_i == 0)
{
cout<<"[ 杂交过程的随机数产生有问题... ]"<<endl;
}
// 杂交基因段
int Father_Cross[CITY_NUM]; // 父亲遗传基因段
int Mother_Cross[CITY_NUM]; // 母亲遗传基因段
int Length_Cross = 0; // 杂交的个数
for (int i = IndexCross_i;i <= IndexCross_j; i++)
{
Father_Cross[Length_Cross] = TSP_Father.path[i];
Mother_Cross[Length_Cross] = TSP_Mother.path[i];
Length_Cross++;
}
// 开始杂交 - 处理 TSP_Father:找到Father_Cross[]中会产生冲突的城市
int *Conflict_Father; // 存储冲突的位置
int *Conflict_Mother;
int Length_Conflict = 0; // 冲突的个数
Conflict_Father = Get_Conflict(Father_Cross, Mother_Cross, Length_Cross, Length_Conflict);
Conflict_Mother = Get_Conflict(Mother_Cross, Father_Cross, Length_Cross, Length_Conflict);
// Father and Mother 交换基因段
int city_temp;
for (int i = IndexCross_i; i <= IndexCross_j; i++)
{
city_temp = TSP_Father.path[i];
TSP_Father.path[i] = TSP_Mother.path[i];
TSP_Mother.path[i] = city_temp;
}
// 开始杂交 - 处理 TSP_Mother, 其中Length_Conflict会在函数Get_Conflict()中改变并保存
TSP_solution Descendant_ONE = Handle_Conflict(G, TSP_Father, Conflict_Father, Conflict_Mother, Length_Conflict); // 解决 TSP_Father 的冲突
TSP_solution Descendant_TWO = Handle_Conflict(G, TSP_Mother, Conflict_Mother, Conflict_Father, Length_Conflict); // 解决 TSP_Mother 的冲突
Son_solution[Length_SonSoliton++] = Descendant_ONE;
Son_solution[Length_SonSoliton++] = Descendant_TWO;
}5. 个体变异:
// 变异
/*
输入:杂交得到的所有个体(大于总群规模)
输出:通过变异策略, 以一定的变异概率(确定变异个数)随机选择个体进行变异
变异策略:随机交换染色体的片段, TSP - 随机交换两个城市的位置
*/
void Evo_Variation(Graph G, int Index_Variation){
// 随机产生两个随机数表示两个城市的位置, 并进行位置交换
int City_i = (rand() % (CITY_NUM - 1)) + 1; // [1, CITY_NUM - 1]起始城市不变异
int City_j = (rand() % (CITY_NUM - 1)) + 1; //
while(City_i == City_j){
City_j = (rand() % (CITY_NUM - 1)) + 1;
}
// 交换城市位置 - 变异
int temp_City = Son_solution[Index_Variation].path[City_i];
Son_solution[Index_Variation].path[City_i] = Son_solution[Index_Variation].path[City_j];
Son_solution[Index_Variation].path[City_j] = temp_City;
}6. 更新种群(精英保留策略):
// 父代 - TSP_Groups[]
// 子代 - Son_solution[]
void Evo_UpdateGroup(Graph G){
TSP_solution tempSolution;
// 先对子代 - Son_solution[] 依据路径长度进行排序 - 降序[按路径从大到小]
for (int i = 0; i < Length_SonSoliton; i++)
{
for (int j = Length_SonSoliton - 1; j > i; j--)
{
if ( Son_solution[i].length_path > Son_solution[j].length_path )
{
tempSolution = Son_solution[i];
Son_solution[i] = Son_solution[j];
Son_solution[j] = tempSolution;
}
}
}
// 更新
for (int i = 0; i < Length_SonSoliton; i++) // 子代 - 按路径从大到小排序
{
for (int j = 0; j < GROUP_NUM; j++) // 父代
{
if ( Son_solution[i].length_path < TSP_Groups[j].length_path )
{
TSP_Groups[j] = Son_solution[i]; // 种群更新
break;
}
}
}
TSP_Evaluate(G);
}7. 以概率的形式计算个体优先级(路径越短概率越高):
// 处理对象:每次新产生的群体, 计算每个个体的概率
// 问题:解决TSP问题, 路径越短概率应该越高
// 方案:对于当前总群, 将所有个体路径取倒数, 然后乘以该总群的总路径得到大于1的值, 然后进行归一化, 取得概率
// 归一化:累加当前所有大于1的个体的伪概率, 得到TempTotal_P, 每个概率再分别除以 TempTotal_P 进行归一化
void Calc_Probablity(Graph G, double total_length){
double TempTotal_P = 0.0;
for (int i = 0; i < GROUP_NUM ;i++)
{
TSP_Groups[i].P_Reproduction = (1.0 / TSP_Groups[i].length_path ) * total_length;
TempTotal_P += TSP_Groups[i].P_Reproduction;
}
for (int i = 0;i < GROUP_NUM; i++)
{
TSP_Groups[i].P_Reproduction = TSP_Groups[i].P_Reproduction / TempTotal_P;
}
}8. 评价函数:
/*
// TSP - 评价函数
// 输入:当前总群 TSP_Groups[] - 包括 每个个体的路径和所需的长度
// 输出:当前总群中, 最优的个体:bestSolution
// 评价方法:路径最短的为最优
*/
void TSP_Evaluate(Graph G){
TSP_solution bsetSolution;
bsetSolution = TSP_Groups[0];
for (int i = 1; i < GROUP_NUM; i++)
{
if (bsetSolution.length_path > TSP_Groups[i].length_path)
{
bsetSolution = TSP_Groups[i];
}
}
}9. 处理冲突:
TSP_solution Handle_Conflict(Graph G, TSP_solution ConflictSolution, int *Detection_Conflict, int *Model_Conflict, int Length_Conflict){
/*
cout<<"[ Handle_Conflict ]"<<endl<<"Detection_Conflict = ";
for (int i = 0;i < Length_Conflict; i++)
{
cout<<Detection_Conflict[i]<<" ";
}
cout<<endl<<"Model_Conflict = ";
for (int i = 0;i < Length_Conflict; i++)
{
cout<<Model_Conflict[i]<<" ";
}
cout<<endl;
cout<<"【存在冲突】基因组为:";
for (int i = 0;i < G.vex_num;i++)
{
cout<<ConflictSolution.path[i]<<" -> ";
}
cout<<ConflictSolution.path[0]<<endl;
*/
for (int i = 0; i <= Length_Conflict; i++)
{
bool flag_FindCity = false;
int index = 0;
// [0, IndexCross_i) 寻找冲突
for (index = 0; index < IndexCross_i; index++)
{
if (Model_Conflict[i] == ConflictSolution.path[index])
{
flag_FindCity = true;
break;
}
}
// 第一段没找到, 找剩余的部分【除了交换的基因段外】
if (!flag_FindCity)
{
// [IndexCross_i + 1, G.vex_num) 寻找冲突
for (index = IndexCross_j + 1; index < G.vex_num; index++)
{
if (Model_Conflict[i] == ConflictSolution.path[index])
{
break;
}
}
}
// 9 8 [1 4 0 3 2] 3 2 0 --> ConflictSolution
// 8 7 [4 5 6 7 1] 9 6 5
// [0 3 2] --> Detection_Conflict
// [4 5 6] --> Model_Conflict
// 解决冲突, index 为当前i冲突的位置, 用Model_Conflict去替换.
// cout<<"index = "<<index<<endl;
ConflictSolution.path[index] = Detection_Conflict[i];
}
if (!Check_path(G, ConflictSolution))
{
cout<<"【error - 冲突未解决......】"<<endl;
}
// cout<<" length_path = "<<ConflictSolution.length_path<<" P_Reproduction = "<<ConflictSolution.P_Reproduction<<endl;
return ConflictSolution;
}10. 计算程序耗时:
#include <ctime>
int main(){
time_t T_begin = clock();
// 耗时程序段
time_t T_end = clock();
double RunningTime = double(T_end - T_begin) / CLOCKS_PER_SEC;
cout<<endl<<"【 程序运行时间 RunningTime = " << RunningTime << " 】"<<endl;
return 0;
}六、测试数据及其运行结果
1. 测试数据:由150个城市组成,(由于数据量太大,以txt的形式共享,点击这里下载)
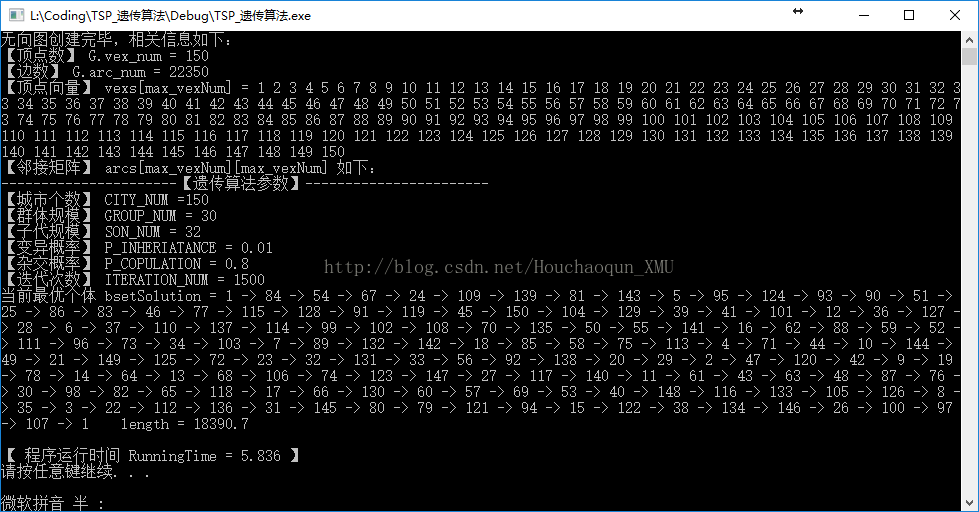
2. 运行结果及其分析:

七、总结
1. 总结:
- 【GA与模拟退火算法的区别】模拟退火是采用单个个体进行优化,解的优化不易陷入局部极小,对整个解空间的覆盖不够,依赖初始参数的设置。遗传算法是一种群体性算法,具有并行性,全局搜索能力极强,局部搜索能力差。参数的选择对算法性能影响很大,并且需要对问题进行编码。
- 【GA与模拟退火算法的相同点】两者均属于概率搜索算法。均需要平衡局部搜索与全局搜索,从而避免过早陷入局部搜索。算法的鲁棒性强,对目标函数及约束函数的形式没有严格要求,不需要其可导、连续等解析性质。两种算法均易于与其它启发式算法相融合。
- 【应用研究领域】函数优化,组合优化,生产调度问题,自动控制,机器人智能控制,图象处理和模式识别。
- 【展望】本文实现较简单的遗传算法,还有许多可以优化的地方,由于时间原因未进一步研究,在此不做详细介绍,有兴趣的同学可以加以改进!
2. 遗传算法相关经验参数:
| 遗传算法相关参数 | 经验值 |
| 总群规模M | 20 -- 100 |
| 交叉概率 | 0.4 -- 0.99 |
| 变异概率 | 0.0001 -- 0.1 |
| 遗传过程的迭代次数 | 100 -- 1000 |
3. 遗传算法的优缺点:(尚待完善,后续补充)
2)收敛性能差
八、程序源码
1. GA.h
#ifndef _GA_H_
#define _GA_H_
#define CITY_NUM 150 // TSP_城市个数
#define GROUP_NUM 30 // 群体规模
#define SON_NUM 32 // 产生儿子的个数 SON_NUM = GROUP_NUM + 2
const double P_INHERIATANCE = 0.01; // 变异概率
const double P_COPULATION = 0.8; // 杂交概率
const int ITERATION_NUM = 1500; // 遗传次数(迭代次数)
const double MAX_INT = 9999999.0;
typedef struct{
int vex_num, arc_num; // 顶点数 边数
int vexs[CITY_NUM]; // 顶点向量
double arcs[CITY_NUM][CITY_NUM]; // 邻接矩阵
}Graph;
typedef struct{
double length_path;
int path[CITY_NUM];
double P_Reproduction;
}TSP_solution;
TSP_solution TSP_Groups[GROUP_NUM]; // 存储群体
TSP_solution Son_solution[SON_NUM]; // 存储杂交后的个体
int Length_SonSoliton = 0; // 遗传产生的孩子的个数
void CreateGraph(Graph &G);
void InitialGroup(Graph G);
double CalculateLength(Graph G,TSP_solution newSolution);
void TSP_Evolution(Graph G); // 模拟生物进化 - 解决TSP问题
int Evo_Select(Graph G); // 选择函数
void Evo_Cross(Graph G, TSP_solution TSP_Father, TSP_solution TSP_Mother); // 杂交函数
void Evo_Variation(Graph G, int Index_Variation); // 变异函数
void Evo_UpdateGroup(Graph G);
void TSP_Evaluate(Graph G); // TSP - 评价函数
int *Get_Conflict(int Conflict_Father[], int Conflict_Mother[], int Length_Cross, int &Length_Conflict); // 返回冲突的数组
TSP_solution Handle_Conflict(Graph G, TSP_solution ConflictSolution, int *Detection_Conflict, int *Model_Conflict, int Length_Conflict); // 解决冲突
void Calc_Probablity(Graph G, double total_length); // 计算概率
bool Check_path(Graph G, TSP_solution CurrentSolution);
void Display(Graph G);
#endif2. GA.cpp
#include <iostream>
#include <fstream>
#include <iomanip> // 本文用于输出对齐
#include <stdlib.h>
#include <ctime>
#include <algorithm>
#include "GA.h"
using namespace std;
int IndexCross_i;
int IndexCross_j;
int main(){
time_t T_begin = clock();
Graph G;
CreateGraph(G);
srand ( unsigned ( time(0) ) );
InitialGroup(G);
TSP_Evolution(G); // 遗传算法
time_t T_end = clock();
double RunningTime = double(T_end - T_begin) / CLOCKS_PER_SEC;
cout<<endl<<"【 程序运行时间 RunningTime = " << RunningTime << " 】"<<endl;
system("pause");
return 0;
}
void CreateGraph(Graph &G){
ifstream read_in;
read_in.open("L:\\Coding\\TSP_遗传算法\\TSP_遗传算法\\city_150.txt");
if (!read_in.is_open())
{
cout<<"文件读取失败."<<endl;
return;
}
read_in >> G.vex_num;
// read_in >> G.arc_num;
G.arc_num = 0;
for (int i = 0;i < G.vex_num; i++)
{
read_in >> G.vexs[i];
}
G.vexs[G.vex_num] = '\0'; // char的结束符.
for (int i = 0; i < G.vex_num;i++)
{
for (int j = 0; j < G.vex_num; j++)
{
read_in >> G.arcs[i][j];
// calculate the arc_num
if (G.arcs[i][j] > 0)
{
G.arc_num++;
}
}
}
// display
cout<<"无向图创建完毕,相关信息如下:"<<endl;
cout<<"【顶点数】 G.vex_num = "<<G.vex_num<<endl;
cout<<"【边数】 G.arc_num = "<<G.arc_num<<endl;
cout<<"【顶点向量】 vexs[max_vexNum] = ";
for (int i = 0; i < G.vex_num; i++)
{
cout << G.vexs[i] << " ";
}
}
void InitialGroup(Graph G){
cout<<"----------------------【遗传算法参数】-----------------------"<<endl;
cout<<"【城市个数】 CITY_NUM ="<< CITY_NUM <<endl;
cout<<"【群体规模】 GROUP_NUM = "<< GROUP_NUM <<endl;
cout<<"【子代规模】 SON_NUM = "<< SON_NUM <<endl;
cout<<"【变异概率】 P_INHERIATANCE = "<< P_INHERIATANCE <<endl;
cout<<"【杂交概率】 P_COPULATION = "<< P_COPULATION <<endl;
cout<<"【迭代次数】 ITERATION_NUM = "<< ITERATION_NUM <<endl;
double total_length = 0.0;
for(int i = 0;i < GROUP_NUM; i++){
for (int j = 0;j < G.vex_num; j++)
{
TSP_Groups[i].path[j] = G.vexs[j];
}
random_shuffle(TSP_Groups[i].path + 1, TSP_Groups[i].path + G.vex_num);
if (Check_path(G, TSP_Groups[i]))
{
TSP_Groups[i].length_path = CalculateLength(G, TSP_Groups[i]);
total_length += TSP_Groups[i].length_path;
}else{
cout<<"【error!城市路径产生重复城市!】"<<endl;
TSP_Groups[i].length_path = MAX_INT;
TSP_Groups[i].P_Reproduction = 0;
}
}
Calc_Probablity(G, total_length);
TSP_Evaluate(G);
}
// 处理对象:每次新产生的群体, 计算每个个体的概率
// 问题:解决TSP问题, 路径越短概率应该越高
// 方案:对于当前总群, 将所有个体路径取倒数, 然后乘以该总群的总路径得到大于1的值, 然后进行归一化, 取得概率
// 归一化:累加当前所有大于1的个体的伪概率, 得到TempTotal_P, 每个概率再分别除以 TempTotal_P 进行归一化
void Calc_Probablity(Graph G, double total_length){
double TempTotal_P = 0.0;
for (int i = 0; i < GROUP_NUM ;i++)
{
TSP_Groups[i].P_Reproduction = (1.0 / TSP_Groups[i].length_path ) * total_length;
TempTotal_P += TSP_Groups[i].P_Reproduction;
}
for (int i = 0;i < GROUP_NUM; i++)
{
TSP_Groups[i].P_Reproduction = TSP_Groups[i].P_Reproduction / TempTotal_P;
}
}
void TSP_Evolution(Graph G){
/* */
int iter = 0;
while(iter < ITERATION_NUM){
// cout<<"***********************【第次"<<(iter + 1)<<"迭代】*************************"<<endl;
// 1. 选择
int Father_index = Evo_Select(G);
int Mother_index = Evo_Select(G);
while (Mother_index == Father_index)
{
// 防止Father和Mother都是同一个个体 -> 自交( 父母为同一个个体时, 母亲重新选择, 直到父母为不同的个体为止 )
// cout<<"Warning!【Father_index = Mother_index】"<<endl;
Mother_index = Evo_Select(G);
}
// TSP_Groups[]为当前总群
TSP_solution Father = TSP_Groups[Father_index];
TSP_solution Mother = TSP_Groups[Mother_index];
// 2. 交叉, 存储在全局变脸 Son_solution[] 数组 - 通过M次杂交, 产生2M个新个体, 2M >= GROUP_NUM
int M = GROUP_NUM - GROUP_NUM/2;
Length_SonSoliton = 0; // 遗传产生的个体个数, 置零重新累加
while(M){
double Is_COPULATION = ((rand()%100 + 0.0) / 100);
if (Is_COPULATION > P_COPULATION)
{
// cout<<"[ 这两个染色体不进行杂交 ]Is_COPULATION = "<<Is_COPULATION<<endl;
}else{
// 杂交, 将结果存储于遗传个体总群,全局变量Son_solution[]
Evo_Cross(G, Father, Mother);
M--;
}
}
// 3. 变异:针对 Son_solution[]
double total_length = 0.0; // 更新新个体的概率
for (int IndexVariation = 0;IndexVariation < Length_SonSoliton; IndexVariation++)
{
double RateVariation = float(rand()%100) / 100;
// 产生的随机数小于变异概率 则该个体进行变异
if (RateVariation < P_INHERIATANCE)
{
Evo_Variation(G, IndexVariation);
}
// 经过变异处理后 重新计算路径值
if (!Check_path(G, Son_solution[IndexVariation]))
{
cout<<"【Error! 路径有重复!】"<<endl;
}
// 产生新个体, 计算新路径和新概率
Son_solution[IndexVariation].length_path = CalculateLength(G, Son_solution[IndexVariation]);
total_length += Son_solution[IndexVariation].length_path;
}
Calc_Probablity(G, total_length);
/*
cout<<"【遗传产生的子代个体如下...】"<<endl;
for (int i = 0; i < Length_SonSoliton; i++)
{
for (int j = 0;j < G.vex_num;j++)
{
cout<<Son_solution[i].path[j]<<" -> ";
}
cout<<Son_solution[i].path[0]<<" length_path = "<<Son_solution[i].length_path<<" P_Reproduction = "<<Son_solution[i].P_Reproduction<<endl;
}
*/
// 4. 更新群体
// 参与对象:父代 + 遗传的子代
Evo_UpdateGroup(G);
iter++;
}
}
// 选择
/*
输入:当前总群
输出:按照一个评价, 随机从当前总群筛选出杂交对象, 本程序每次返回一个个体
选择方案:比例选择规则, [轮盘赌选择]
机制:反映在对父代种群中每一个体所赋予的允许繁殖概率及其从2M个中间个体中如何选择子代种群的机制上!
*/
/*
[轮盘赌选择] - 轮盘赌选择是从染色体群体中选择一些成员的方法,被选中的机率和它们的适应性分数成比例,染色体的适应性分数愈高,被选中的概率也愈多.
1. 随机产生一个概率 selection_P
2. [概率分布函数]声明变量 distribution_P = 0, 对于每个个体, 依次累加个体的概率到distribution_P上, 判断当前随机概率selection_P是否小于distribution_P, 若是则中该染色体, 结束循环
*/
int Evo_Select(Graph G){
double selection_P = ((rand()%100 + 0.0) / 100);
// cout<<"selection_P = "<<selection_P<<endl;
double distribution_P = 0.0;
for (int i = 0; i < GROUP_NUM; i++)
{
distribution_P += TSP_Groups[i].P_Reproduction;
if (selection_P < distribution_P)
{
return i;
}
}
cout<<"【ERROR!】Evo_Select() 轮盘赌选择有误..."<<endl;
return 0;
}
// 交叉
/*
输入:[TSP_Father , TSP_Mother]两个个体作为父母, 进行杂交
输出:通过杂交产生新个体(遗传算法产生2个新个体, 演化算法产生1个新个体)
杂交方案:[父子混合选择][自然选择 - 父母不参与竞争]
-- [演化策略]所使用的杂交算子是从两个个体生成一个个体的操作
-- [遗传算法]生成两个新个体。常见的“中间杂交”(intermediate crossover)及“随机杂交”(random crossover)等!
*/
/*
TSP_杂交具体方法:
1. 随机选取两个交叉点i和j,记为 Father_Cross 和 Mother_Cross
2. 将两交叉点中间的基因段互换
3. 分别对Father和Mother的路径进行冲突处理:
-- 以Father为例, 保持Father_Cross基因段不变, 基因段以外的部分与Father_Cross基因段冲突的城市, 用Father_Cross和Mother_Cross对应的位置去互换, 直到没有冲突.
-- 冲突城市的确定: Father_Cross 和 Mother_Cross去补集,存放于数组 Conflict[] 中.
*/
void Evo_Cross(Graph G, TSP_solution TSP_Father, TSP_solution TSP_Mother){
// 杂交过程:随机产生杂交的位置, 保证 IndexCross_i < IndexCross_j【全局变量】
IndexCross_i = rand() % (CITY_NUM - 1) + 1; // 不能取到起始城市
IndexCross_j = rand() % (CITY_NUM - 1) + 1; //
if (IndexCross_i > IndexCross_j)
{
int temp = IndexCross_i;
IndexCross_i = IndexCross_j;
IndexCross_j = temp;
}
if (IndexCross_j == CITY_NUM || IndexCross_i == 0)
{
cout<<"[ 杂交过程的随机数产生有问题... ]"<<endl;
}
// 杂交基因段
int Father_Cross[CITY_NUM]; // 父亲遗传基因段
int Mother_Cross[CITY_NUM]; // 母亲遗传基因段
int Length_Cross = 0; // 杂交的个数
for (int i = IndexCross_i;i <= IndexCross_j; i++)
{
Father_Cross[Length_Cross] = TSP_Father.path[i];
Mother_Cross[Length_Cross] = TSP_Mother.path[i];
Length_Cross++;
}
// 开始杂交 - 处理 TSP_Father:找到Father_Cross[]中会产生冲突的城市
int *Conflict_Father; // 存储冲突的位置
int *Conflict_Mother;
int Length_Conflict = 0; // 冲突的个数
Conflict_Father = Get_Conflict(Father_Cross, Mother_Cross, Length_Cross, Length_Conflict);
Conflict_Mother = Get_Conflict(Mother_Cross, Father_Cross, Length_Cross, Length_Conflict);
// Father and Mother 交换基因段
int city_temp;
for (int i = IndexCross_i; i <= IndexCross_j; i++)
{
city_temp = TSP_Father.path[i];
TSP_Father.path[i] = TSP_Mother.path[i];
TSP_Mother.path[i] = city_temp;
}
// 开始杂交 - 处理 TSP_Mother, 其中Length_Conflict会在函数Get_Conflict()中改变并保存
TSP_solution Descendant_ONE = Handle_Conflict(G, TSP_Father, Conflict_Father, Conflict_Mother, Length_Conflict); // 解决 TSP_Father 的冲突
TSP_solution Descendant_TWO = Handle_Conflict(G, TSP_Mother, Conflict_Mother, Conflict_Father, Length_Conflict); // 解决 TSP_Mother 的冲突
Son_solution[Length_SonSoliton++] = Descendant_ONE;
Son_solution[Length_SonSoliton++] = Descendant_TWO;
}
TSP_solution Handle_Conflict(Graph G, TSP_solution ConflictSolution, int *Detection_Conflict, int *Model_Conflict, int Length_Conflict){
for (int i = 0; i <= Length_Conflict; i++)
{
bool flag_FindCity = false;
int index = 0;
// [0, IndexCross_i) 寻找冲突
for (index = 0; index < IndexCross_i; index++)
{
if (Model_Conflict[i] == ConflictSolution.path[index])
{
flag_FindCity = true;
break;
}
}
// 第一段没找到, 找剩余的部分【除了交换的基因段外】
if (!flag_FindCity)
{
// [IndexCross_i + 1, G.vex_num) 寻找冲突
for (index = IndexCross_j + 1; index < G.vex_num; index++)
{
if (Model_Conflict[i] == ConflictSolution.path[index])
{
break;
}
}
}
// 9 8 [1 4 0 3 2] 3 2 0 --> ConflictSolution
// 8 7 [4 5 6 7 1] 9 6 5
// [0 3 2] --> Detection_Conflict
// [4 5 6] --> Model_Conflict
// 解决冲突, index 为当前i冲突的位置, 用Model_Conflict去替换.
// cout<<"index = "<<index<<endl;
ConflictSolution.path[index] = Detection_Conflict[i];
}
/*
cout<<endl<<"【解决冲突】基因组为:";
for (int i = 0;i < G.vex_num;i++)
{
cout<<ConflictSolution.path[i]<<" -> ";
}
cout<<ConflictSolution.path[0]<<endl;
// 重新计算新路径的长度
// CalculateLength(G, ConflictSolution);
*/
if (!Check_path(G, ConflictSolution))
{
cout<<"【error - 冲突未解决......】"<<endl;
}
// cout<<" length_path = "<<ConflictSolution.length_path<<" P_Reproduction = "<<ConflictSolution.P_Reproduction<<endl;
return ConflictSolution;
}
int *Get_Conflict(int Detection_Cross[], int Model_Cross[], int Length_Cross, int &Length_Conflict){
// 同时存在于 Father_Cross 和 Mother_Cross 为不冲突的城市, 反之是冲突的城市.
// Detection_Cross[]:表示当前搜索的个体, 即找冲突的对象
// Model_Cross[]:
// int Conflict[CITY_NUM];
int *Conflict = new int[CITY_NUM];
Length_Conflict = 0;
for (int i = 0; i < Length_Cross; i++)
{
bool flag_Conflict = true; // 判断是否属于冲突
for (int j = 0; j < Length_Cross; j++)
{
if (Detection_Cross[i] == Model_Cross[j])
{
// 结束第二层循环
j = Length_Cross;
flag_Conflict = false; // 该城市不属于冲突
}
}
if (flag_Conflict)
{
Conflict[Length_Conflict] = Detection_Cross[i];
Length_Conflict++;
}
}
return Conflict;
}
// 变异
/*
输入:杂交得到的所有个体(大于总群规模)
输出:通过变异策略, 以一定的变异概率(确定变异个数)随机选择个体进行变异
变异策略:随机交换染色体的片段, TSP - 随机交换两个城市的位置
*/
void Evo_Variation(Graph G, int Index_Variation){
// 随机产生两个随机数表示两个城市的位置, 并进行位置交换
int City_i = (rand() % (CITY_NUM - 1)) + 1; // [1, CITY_NUM - 1]起始城市不变异
int City_j = (rand() % (CITY_NUM - 1)) + 1; //
while(City_i == City_j){
City_j = (rand() % (CITY_NUM - 1)) + 1;
}
// 交换城市位置 - 变异
int temp_City = Son_solution[Index_Variation].path[City_i];
Son_solution[Index_Variation].path[City_i] = Son_solution[Index_Variation].path[City_j];
Son_solution[Index_Variation].path[City_j] = temp_City;
}
// 父代 - TSP_Groups[]
// 子代 - Son_solution[]
void Evo_UpdateGroup(Graph G){
TSP_solution tempSolution;
// 先对子代 - Son_solution[] 依据路径长度进行排序 - 降序[按路径从大到小]
for (int i = 0; i < Length_SonSoliton; i++)
{
for (int j = Length_SonSoliton - 1; j > i; j--)
{
if ( Son_solution[i].length_path > Son_solution[j].length_path )
{
tempSolution = Son_solution[i];
Son_solution[i] = Son_solution[j];
Son_solution[j] = tempSolution;
}
}
}
/*
cout<<"【冒泡排序后...】"<<endl;
for (int i = 0; i < Length_SonSoliton; i++)
{
cout<<"length_path = "<<Son_solution[i].length_path<<endl;
}
*/
// 更新
for (int i = 0; i < Length_SonSoliton; i++) // 子代 - 按路径从大到小排序
{
for (int j = 0; j < GROUP_NUM; j++) // 父代
{
if ( Son_solution[i].length_path < TSP_Groups[j].length_path )
{
TSP_Groups[j] = Son_solution[i]; // 种群更新
break;
}
}
}
TSP_Evaluate(G);
}
double CalculateLength(Graph G, TSP_solution newSolution){
double _length = 0;
for (int i = 0; i < G.vex_num - 1; i++)
{
int _startCity = newSolution.path[i] - 1; // 路径下标是从 1 开始存储
int _endCity = newSolution.path[i+1] - 1;
if (G.arcs[_startCity][_endCity] == -1)
{
return MAX_INT;
}
else{
_length += G.arcs[_startCity][_endCity];
}
}
// 判断该路径是否能回到起始城市
if (G.arcs[newSolution.path[G.vex_num - 1]][newSolution.path[0] - 1] == -1)
{
return MAX_INT;
}
else{
_length += G.arcs[newSolution.path[G.vex_num - 1] - 1][newSolution.path[0] - 1];
// cout<<"_length = "<<_length<<endl;
return _length;
}
}
bool Check_path(Graph G, TSP_solution CurrentSolution){
for (int i = 0; i < G.vex_num;i++)
{
for (int j = i + 1; j < G.vex_num; j++)
{
if (CurrentSolution.path[i] == CurrentSolution.path[j])
{
return false;
}
}
}
return true;
}
/*
// TSP - 评价函数
// 输入:当前总群 TSP_Groups[] - 包括 每个个体的路径和所需的长度
// 输出:当前总群中, 最优的个体:bestSolution
// 评价方法:路径最短的为最优
*/
void TSP_Evaluate(Graph G){
TSP_solution bsetSolution;
bsetSolution = TSP_Groups[0];
for (int i = 1; i < GROUP_NUM; i++)
{
if (bsetSolution.length_path > TSP_Groups[i].length_path)
{
bsetSolution = TSP_Groups[i];
}
}
cout<<"当前最优个体 bsetSolution = ";
for (int i = 0;i < G.vex_num;i++)
{
cout<<bsetSolution.path[i]<<" -> ";
}
cout<<bsetSolution.path[0]<<" length = "<<bsetSolution.length_path<<endl;
}九、参考文献
- 胡妙娟,胡春,钱锋,遗传算法中选择策略的分析
- 本文相关代码以及数据:http://download.csdn.net/detail/houchaoqun_xmu/9740071
- 白话讲解遗传算法 (Genetic Algorithm):http://blog.chinaunix.net/uid-27105712-id-3886077.html
- Study on Fuzzy Classifier Based on Genetic Algorithm Optimization
- Feature Selection Based on Hybridization of Genetic Algorithm and Particle Swarm Optimization
- A genetic algorithm-based learning approach to understand customer satisfaction with OTA websites
- Boolean regulatory network reconstruction using literature based knowledge with a genetic algorithm optimization method