最短路径:一个图里有很多边,每条边有权值,两点之间的权值最小的路径。
负权回路:一个环(某点出发走了一圈还回到原点)里的权值和为负数(环里的每个权值可正可负,但和为负)。
首先,存在负权回路的图里没有最短路,因为只要一直走这个回路就可以达到无限短。所以以下算法都是基于无负权回路的前提下。
算法验证:用HDU 2544 最短路提交能对就认为代码正确。
Floyd-Warshall
- 适用范围:无负权回路即可,边权可正可负,运行一次算法即可求得任意两点间最短路
- 时间复杂度:O(n^3)
定义dp[i][j]:i到j的最短路径,则在初始化dp的原图数据后,核心代码就这么短
void floyd() {
for (int k = 1; k <= n; ++k) {
for (int i = 1; i <= n; ++i) {
for (int j = 1; j <= n; ++j) {
dp[i][j] = min(dp[i][j], dp[i][k] + dp[k][j]);
}
}
}
}
千万别以为k代表的是除i,j外的第三个点,要这么以为的话代码中的k循环应该在最里面, 即对每对(i,j)选择一个第三点k中转,但这样结果是错的。那k代表什么?往下看。
原理
打开算法导论(英文版)第693页看看,我知道你不想看英文,所以看下面的个人理解和翻译。
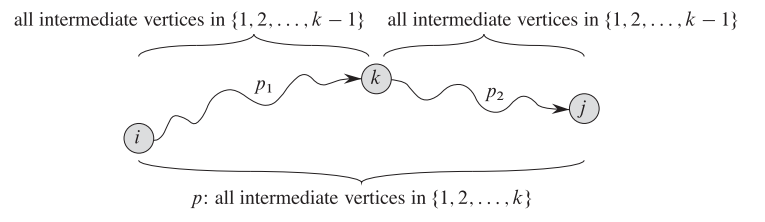
假定结点集V为{1,2..n},对于 (i, j) 这条路,我们考虑它中途经过一些结点的所有情况(这些结点都取自集合{1,2,..k}),然后定义路径p为所有情况里的最短路径(即我们要找的答案路径)。那么关于k的p的关系有两种:
- k不在 最短路径p 里,即p里的点都是{1,2,..k-1}的点,则显然(i, j)经过{1,2,..k}的最短路 和 经过{1,2,..k-1}的最短路是一样的。
- k在 最短路径p 里,则p里的点都是{1,2,..k}的点,那我们可以把p分为(i,k)和(k,j),这两条分出来路径的只含{1,2,..k-1},因为p是最短路径,而k又在p里,所以(i,k)和(k,j)都是相对于(i,j)的最短路径 【此处算导没给证明,我们先假定自己认可这个结论】
根据上面的两种情况我们就可以得出递推式子

注意k是集合大小,不是经过的点个数,k=0的时候是不经过任何中间点的情况,k>=1表示经过{1,2..k}这个集合里的点集。没看懂式子的话再看下那两种情况,看懂的话我们发现需要三维数组才能表示这种
,但在式子中我们的(k)其实只用在递推上,所以在上面代码中我们把k循环放在最外面就可以确保在计算
前 dp[i][j]存的是
,同理
和
也是一样。这点也就类似背包的二维压成一维。
实现
- dp数组对于不存在的边初始化为无穷大,但直接用INT_MAX的话在
dp[i][k] + dp[k][j]的时候溢出,所以精确来说设置 为比全部路径的最大值大一点就行,如10条最大1000的边则设置为10*1000+1,但为写代码方便就用0x3f3f3f3f(大概10亿)比较适合。 - dp[i][i]初始化为0,即使就做题而言可能不会WA。
#include <string.h>
#include <iostream>
using namespace std;
const int maxn = 105;
const int inf = 0x3f3f3f3f;
int n,m;
int dp[maxn][maxn];
void floyd() {
for (int k = 1; k <= n; ++k) {
for (int i = 1; i <= n; ++i) {
for (int j = 1; j <= n; ++j) {
dp[i][j] = min(dp[i][j], dp[i][k] + dp[k][j]);
}
}
}
}
int main(){
int a,b,c;
while(cin>>n>>m,n||m){
memset(dp,inf,sizeof(dp));
for (int i = 1; i <= n; ++i){
dp[i][i] = 0; //不是必要
}
for (int i = 1; i <= m; ++i){
cin>>a>>b>>c;
dp[a][b] = dp[b][a] = c;
}
floyd();
cout<<dp[1][n]<<endl;
}
return 0;
}Dijkstra
通俗翻译为迪杰斯特拉算法
- 适用范围:无负权回路,边权必须非负,单源最短路
- 时间复杂度:优化前O(
)
简单粗暴的原理
更新:2018-02-21
求t 点到s点的距离,假设距离s点最近的点p1距离为L,那么这个点一定是最短的,因为不可能有比直达最近的点还近的路,那么选它没错。
然后把s和点p1看成一个点S’,再同理选距离S’最近的点(其实这里实际求的是距离最开始的源点s),就这样一直重复操作贪心下去即可。
其中在选了p1之后我们要更新所有p1点相邻点到s点的最短距离,因为选p1点那么可能经过p1点到s点比原本的点直接到s点更近。
注意求点距离的时候求的是距离源点s最近,不是距离集合S’最近,距离集合S’最近就是最小生成树Prim算法了。
过程
数组dis[u]表示u到s点的最短距离。
我们一直找点u = min{ dis[k] , k点未访问 },这个点就是最短路上的点,然后根据其他点v跟u点的关系去更新下dis[v],不断重复找和更新即可。
dis[s]=0将源点加入最短路,然后循环n-1次每次找出一个最短路上的点,找的方法是直接找出剩下的点中dis[ ]最小的那个点u,u点就是最短路上的点,然后看看其他点v到s点的距离会不会因为这个u点的加入而改变,即若dis[v] > dis[u] + distance[u][v] 则更新dis[v]为 dis[u] + distance[u][v]。
实现
最基础的实现是邻接矩阵(二维数组),然后在找最小的dis[]部分可以用优先队列/最小堆优化查找速度。
#include <cstring>
#include <iostream>
using namespace std;
const int maxn = 105;
const int inf = 0x3f3f3f3f;
int dis[maxn];
bool vis[maxn];
int map_dis[maxn][maxn];
int n,m;
int dijkstra(int s, int t) {
memset(vis, false, sizeof(vis));
for (int i = 1; i <= n; ++i) { //初始化各点到s点的距离
dis[i] = map_dis[s][i];
}
dis[s] = 0, vis[s] = true;
for (int i = 0; i < n - 1; ++i) { //除s点外找n-1个点
int u, tmin = inf;
for (int j = 1; j <= n; ++j){ //找min{dis[]}
if(!vis[j] && dis[j] < tmin){
tmin = dis[j];
u = j;
}
}
// if(tmin == inf) return -1; //无最短路
vis[u] = true; //进入T集合
for (int v = 1; v <= n; ++v){ //更新相邻点
if(!vis[v] && dis[u] + map_dis[u][v] < dis[v]){
dis[v] = dis[u] + map_dis[u][v];
}
}
}
return dis[t];
}
int main() {
int a, b, c;
while (cin >> n >> m, n || m) {
memset(map_dis,inf,sizeof(map_dis));
for (int i = 1; i <= m; ++i) {
cin >> a >> b >> c;
map_dis[a][b] = map_dis[b][a] = c;
}
cout << dijkstra(1,n) << endl;
}
return 0;
}Spfa
Shortest Path Faster Algorithm,是国内原创算法,作者:西南交通大学段凡丁。
- 适用范围:边权可正可负,单源最短路,还可以判断图中有无负权回路
- 时间复杂度:O(kE),k非常数,一般认为是所有点的平均入列次数且k一般小于等于2
原理
算法思路很简单,将源点加入队列,然后不断从队列中弹出顶点u,遍历u的邻接点v进行松弛更新(若dis[v] < dis[u] + distance[u][v] 则更新dis[v]为dis[u] + distance[u]),更新后如果v点不在队列里则进入队列。
证明
每次将点放入队尾,都是经过松弛操作达到的。换言之,每次的优化将会有某个点v的最短路径估计值dis[v]变小。所以算法的执行会使dis越来越小。由于我们假定图中不存在负权回路,所以每个结点都有最短路径值。因此,算法不会无限执行下去,随着d值的逐渐变小,直到到达最短路径值时,算法结束,这时的最短路径估计值就是对应结点的最短路径值。(证毕)
实现
算法思路本身是队列,不过也可以用栈。
队列方案判断负权环:如果某点进入队列的次数 > n次。
栈方案判断负权环:如果某点进入栈的次数 >= 2,栈方法判负环比较高效。
#include <cstdio>
#include <cstring>
#include <string>
#include <stack>
#include <queue>
#include <iostream>
#include <algorithm>
using namespace std;
const int maxn = 105;
const int maxm = 10000;
const int inf = 0x3f3f3f3f;
int inq[maxn], head[maxn], dis[maxn]; //inq[u]==1:u在队列里
struct Edge{
int v, w, next;
} edge[maxm * 2];
int cnt;
void add_edge(int u, int v, int w){ //邻接表前插法
edge[cnt].v = v; edge[cnt].w = w; edge[cnt].next = head[u]; head[u] = cnt++;
}
void init(int n){
cnt = 0;
memset(head, -1, sizeof(head));
memset(inq, 0, sizeof(inq));
memset(dis, inf, sizeof(dis));
}
int spfa(int s, int t){
queue<int>q;
q.push(s);
dis[s] = 0;
inq[s] = 1;
while (!q.empty()){
int u = q.front(); q.pop();
inq[u] = 0;
for (int i = head[u]; i != -1; i = edge[i].next) {
int v = edge[i].v;
int w = edge[i].w;
if (dis[v] > dis[u] + w){
dis[v] = dis[u] + w;
if (!inq[v]){
inq[v] = 1;
q.push(v);
}
}
}
}
return dis[t];
}
int main() {
int n, m, a, b, c;
while (cin >> n >> m, n || m) {
init(n);
for (int i = 0; i < m; ++i) {
cin >> a >> b >> c;
add_edge(a, b, c);
add_edge(b, a, c);
}
cout << spfa(1, n) << endl;
}
return 0;
}队列式判断负权环
bool spfa(int s, int t){
queue<int>q;
q.push(s);
dis[s] = 0;
inq[s] = 1;
times[s]++;
while (!q.empty()){
int u = q.front(); q.pop();
inq[u] = 0;
for (int i = head[u]; i != -1; i = edge[i].next) {
int v = edge[i].v;
int w = edge[i].w;
if (dis[v] > dis[u] + w){
dis[v] = dis[u] + w;
if (!inq[v]){
inq[v] = 1;
q.push(v);
times[v]++;
if(times[v] > n){
return false;
}
}
}
}
}
return true;
}Bellman-Ford
- 适用范围:边权可正可负,单源最短路,还可以判断图中有无负权回路
- 时间复杂度:O(VE),巨慢
Dijkstra算法以贪心法选取未被处理的具有最小权值的节点,然后对其的出边进行松弛操作;而Bellman-Ford简单地对所有边进行松弛操作
BELLMAN-FORD(G, w, s)
1 INITIALIZE-SINGLE-SOURCE(G, s)
2 for i ← 1 to |V[G]| - 1
3 do for each edge (u, v) ∈ E[G]
4 do RELAX(u, v, w)
5 for each edge (u, v) ∈ E[G]
6 do if d[v] d[u] + w(u, v)
7 then return FALSE
8 return TRUE因为效率实在是很低,就不多介绍了