转载自:https://blog.csdn.net/heyijia0327/article/details/41654963
在实际应用中,我们可能想发布自己的消息类型,就像众所周知的Twist类型或者航向信息Odometry一样,那么到底如何定制自己想要的消息类型?本文楼主以自己调试过程中监控机器人左右轮速度来进行演示。
文章内容包括:消息的定制和使用,以及使用rqt_plot来绘制曲线,建议大家先阅读官网教程,一些细节事项也可参见这个自定义消息msg。
首先在你的package创建msg文件夹,然后新建一个空白文档,命名为Num.msg,将下面的左右轮速度复制进去,保存。当然你可以按照官网方式在终端里输入指令来执行上的流程。
这里我定义来一个左右轮速度的如下:
-
float32 leftspeed -
float32 rightspeed</span>
如果你想定义为数组类型的,如下:
-
float32[] leftspeed -
float32[] rightspeed
注意这里的数组使用的是无长度限制的,也就是方扩号内没有东西。在使用的时候,不能够直接用数组赋值那样去做,它实际上是一个向量,往里面填充数据应使用c++中vector的push_back、resize之类的函数。详细内容可参看该ros answer,该例程使用push_back填充数据.也可以参见官方教程中laserscan的发布,laserscan消息中的ranges就是这样一个向量,在程序中laserscan是使用的resize先设定容器大小,再往里填充数据的.
36 scan.ranges.resize(num_readings);//使用resize设定激光点的多少 37 scan.intensities.resize(num_readings); 38 for(unsigned int i = 0; i < num_readings; ++i){ 39 scan.ranges[i] = ranges[i]; //再往里面填数据 40 scan.intensities[i] = intensities[i]; 41 }
定义完以后,注意在package.xml文件里添加:
-
<build_depend>message_generation</build_depend> -
<run_depend>message_runtime</run_depend>
如果你之前创建过消息已经有了上面两句就不用再添加了。
然后在 CMakeLists.txt文件的find_packag里添加一些必要的语句,这个参见前面提到的官网教程。
最主要的是在add_message_files里添加上你自定义的消息。
-
## Generate messages in the 'msg' folder -
add_message_files( -
FILES -
Num.msg -
carOdom.msg -
)
如果都完成以后,新开一个终端,输入一下指令,编译一下:
-
cd ~/catkin_ws -
catkin_make
在程序中首先使用下面的语句引进该消息msg类型
from beginner_tutorials.msg import Num #beginner_tutorials 为自己建立的package,放在catkin_ws/src下在程序中使用自己已经定义的消息:
car_speed = Num() #注意 消息的使用car_speed.leftspeed = a car_speed.rightspeed = b
这里贴一个自己的完整程序在下面,这个程序里包含了Lz自己写的串口模块,这里贴出来只是让大家知道怎么调用自定义的msg。
程序如下:
-
#!/usr/bin/env python -
# -*- coding: utf-8 -*- -
import roslib;roslib.load_manifest('beginner_tutorials') -
import rospy -
from beginner_tutorials.msg import Num #beginner_tutorials 为自己建立的package,放在catkin_ws/src下 -
import serial_lisenning as COM_ctr #这是楼主自己写的串口模块,已经封装好,模块里是开线程不断读取串口 -
import glob -
def talker(): -
rec_data = COM_ctr.SerialData( datalen = 2) #启动监听COM 线程 -
allport = glob.glob('/dev/ttyU*') -
port = allport[0] -
baud = 115200 -
openflag = rec_data.open_com(port, baud) -
pub = rospy.Publisher('car_speed', Num) #topic -
rospy.init_node('talker', anonymous=True) -
r = rospy.Rate(1000) # 1000hz -
while not rospy.is_shutdown(): -
all_data = [] -
if rec_data.com_isopen(): -
all_data = rec_data.next() #接收的数据组 -
if all_data != []: -
car_speed = Num() #注意 消息的使用 -
car_speed.leftspeed = all_data[0][0] -
car_speed.rightspeed = all_data[1][0] -
print car_speed.leftspeed, car_speed.rightspeed -
pub.publish(car_speed) -
r.sleep() -
if openflag: -
rec_data.close_lisen_com() -
if __name__ == '__main__': -
try: -
talker() -
except rospy.ROSInterruptException: pass
注意每次新建的py文件都要使用在新的终端中,用下面的命令使程序可执行。
chmod +x your_code.py运行roscore以后,再开一个新的终端,运行:
rosrun beginner_tutorials bluetooth_msg.py然后再在一个新的终端中,运行:
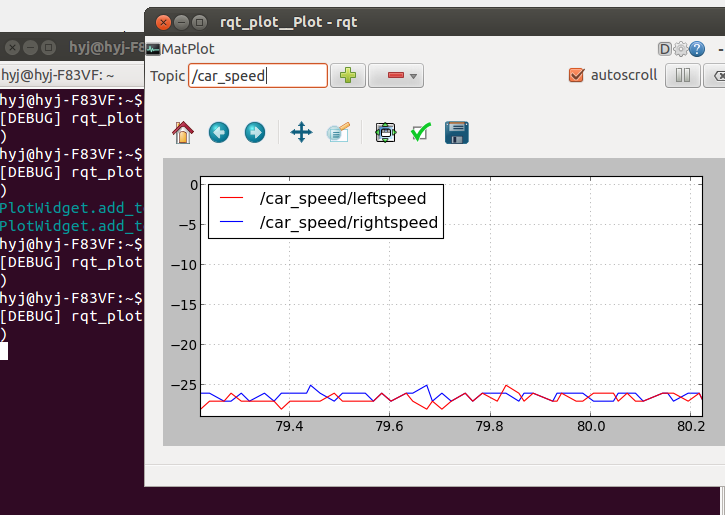
rqt_plot输入我们的topic,就可一使用rqt_plot绘制曲线了。