理论
在计算机视觉估计中,从n个3D到2D点对应的相机姿势是基本且易于理解的问题。 该问题的最一般版本需要估计姿势的六个自由度和五个校准参数:焦距,主点,纵横比和歪斜。 使用众所周知的直接线性变换(DLT)算法,可以建立至少6个对应关系。 但是,对问题进行了若干简化,这些简化成为提高DLT准确性的不同算法的广泛列表。
最常见的简化是假设已知的校准参数,即所谓的Perspective- * n * -Point问题:
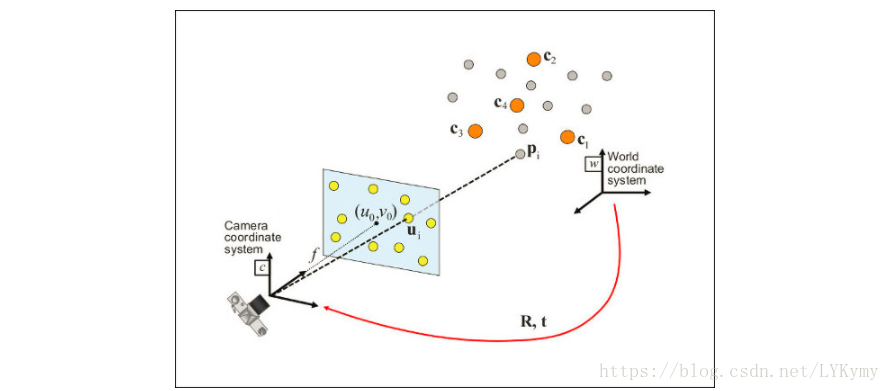
问题公式:给定在世界参考系中表示的3D点pi与其在图像上的2D投影ui之间的一组对应关系,我们寻求检索相机的姿势(R和t)w.r.t. 世界和焦距f。
OpenCV提供了四种不同的方法来解决返回R和t的Perspective- * n * -Point问题。 使用以下公式可以将3D点投影到图像平面:

代码
您可以在OpenCV源库的samples / cpp / tutorial_code / calib3d / real_time_pose_estimation /文件夹中找到本教程的源代码。
本教程包含两个主要程序:
注册模型
- 该应用程序专用于没有要检测的对象的3D纹理模型。 您可以使用此程序创建自己的纹理3D模型。 此程序仅适用于平面对象,如果要对具有复杂形状的对象建模,则应使用复杂的软件来创建它。
- 应用程序需要要注册的对象的输入图像及其3D网格。 我们还必须提供用于拍摄输入图像的相机的固有参数。 需要使用绝对路径或应用程序工作目录中的相对路径指定所有文件。 如果未指定任何文件,程序将尝试打开提供的默认参数。
- 应用程序开始从输入图像中提取ORB特征和描述符,然后使用网格和Möller-Trumbore交集算法计算找到的特征的3D坐标。 最后,3D点和描述符存储在具有YAML格式的文件中的不同列表中,每个行是不同的点。
模型检测
- 该应用的目的是在给定其3D纹理模型的情况下实时估计对象姿势。
- 应用程序开始以YAML文件格式加载3D纹理模型,其结构与模型注册程序中说明的结构相同。 从场景中,检测并提取ORB特征和描述符。 然后,使用cv :: FlannBasedMatcher和cv :: flann :: GenericIndex来进行场景描述符和模型描述符之间的匹配。 使用找到的匹配以及cv :: solvePnPRansac函数,计算摄像机的R和t。 最后,应用KalmanFilter以拒绝不良姿势。
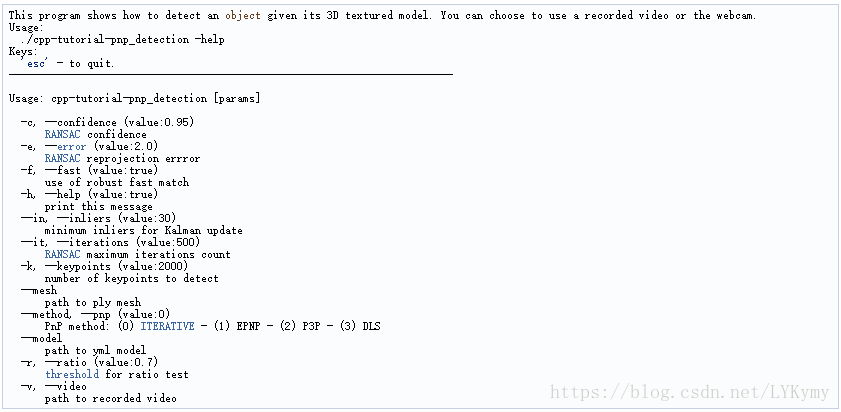
- 如果您使用示例编译OpenCV,可以在opencv / build / bin / cpp-tutorial-pnp_detection`中找到它。 然后,您可以运行该应用程序并更改一些参数:
解释
- 读取3D纹理对象模型和对象网格。
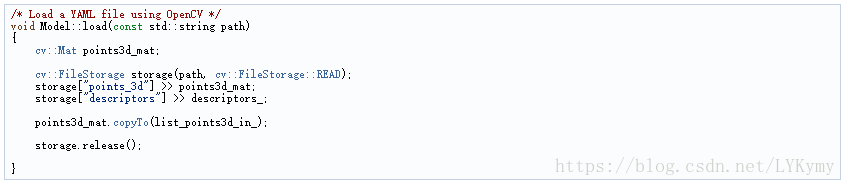
- 为了加载纹理模型,我实现了类Model,它具有函数load(),它打开一个YAML文件,并使用相应的描述符获取存储的3D点。 您可以在samples / cpp / tutorial_code / calib3d / real_time_pose_estimation / Data / cookies_ORB.yml中找到3D纹理模型的示例。
- 在主程序中,模型加载如下:
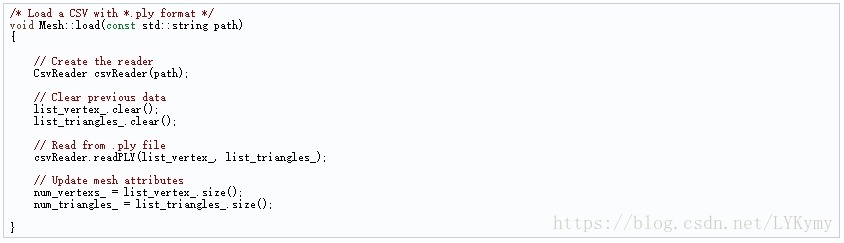
- 为了读取模型网格,我实现了一个类Mesh,它具有一个函数load(),它打开一个* .ply文件并存储对象的3D点以及组合三角形。 您可以在samples / cpp / tutorial_code / calib3d / real_time_pose_estimation / Data / box.ply中找到模型网格的示例。
- 在主程序中,网格加载如下:
- 您还可以加载不同的模型和网格:
- 从相机或视频中获取输入。
- 要检测是必要的捕获视频。 通过传递它在机器中的绝对路径来完成加载录制的视频。 为了测试应用程序,您可以在samples / cpp / tutorial_code / calib3d / real_time_pose_estimation / Data / box.mp4中找到录制的视频。
- 然后算法是每帧计算帧:
- 您还可以加载不同的录制视频:
- 从场景中提取ORB特征和描述符。
- 下一步是检测场景特征并提取它的描述符。 为此,我实现了一个RobustMatcher类,它具有关键点检测和特征提取功能。 您可以在samples / cpp / tutorial_code / calib3d / real_time_pose_estimation / src / RobusMatcher.cpp中找到它。 在您的RobusMatch对象中,您可以使用OpenCV的任何2D特征检测器。 在这种情况下,我使用了cv :: ORB功能,因为它基于cv :: FAST来检测关键点,而cv :: xfeatures2d :: BriefDescriptorExtractor来提取描述符,这意味着它对于旋转来说是快速且健壮的。 您可以在文档中找到有关ORB的更多详细信息。
- 以下代码是如何实例化和设置功能检测器和描述符提取器:
- 使用Flann匹配器将场景描述符与模型描述符匹配。
- 这是我们检测算法的第一步。 主要思想是将场景描述符与我们的模型描述符进行匹配,以便将所找到的特征的3D坐标知道到当前场景中。
- 首先,我们必须设置我们想要使用的匹配器。 在这种情况下使用cv :: FlannBasedMatcher匹配器,它在计算成本方面比cv :: BFMatcher匹配器更快,因为我们增加了训练的特征收集。 然后,对于FlannBased匹配器,创建的索引是Multi-Probe LSH:由于ORB描述符而导致的高维相似性搜索的高效索引是二进制的。
- 您可以调整LSH和搜索参数以提高匹配效率:
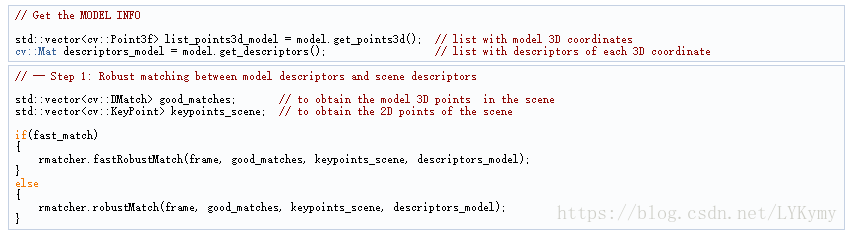
- 其次,我们必须使用robustMatch()或fastRobustMatch()函数来调用匹配器。 使用这两个函数的不同之处在于其计算成本。 第一种方法在过滤良好匹配时速度较慢但更稳健,因为使用了两个比率测试和一个对称测试。 相比之下,第二种方法更快但不太稳健,因为只对比赛应用单一比率测试。以下代码是获取模型3D点及其描述符,然后在主程序中调用匹配器:
- 以下代码对应于属于RobustMatcher类的robustMatch()函数。 此函数使用给定图像来检测关键点并提取描述符,使用给定模型描述符的两个最近邻提取描述符进行匹配,反之亦然。 然后,将比率测试应用于两个方向匹配,以便去除这些匹配,其中第一和第二最佳匹配之间的距离比大于给定阈值。 最后,应用对称性测试以便去除非对称匹配。
- 在匹配过滤之后,我们必须使用获得的DMatches向量从找到的场景关键点和我们的3D模型中减去2D和3D对应关系。 有关cv :: DMatch的更多信息,请查看文档。
- 您还可以更改比率测试阈值,要检测的关键点数量以及是否使用强健匹配器:
- 使用PnP + Ransac进行姿势估计。
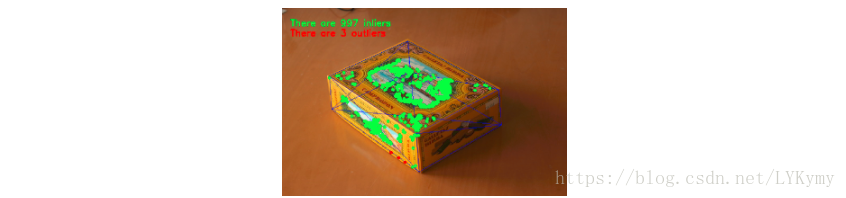
- 一旦使用2D和3D对应,我们必须应用PnP算法来估计相机姿势。 我们必须使用cv :: solvePnPRansac而不是cv :: solvePnP的原因是,在匹配之后,并非所有找到的对应关系都是正确的,并且如同不同,存在错误的对应关系或者也称为异常值。 随机样本共识或Ransac是一种非确定性迭代方法,其根据观察到的数据估计数学模型的参数,随着迭代次数的增加产生近似结果。 在对Ransac进行应用之后,将消除所有异常值,然后以一定的概率估计相机姿态以获得良好的解决方案。
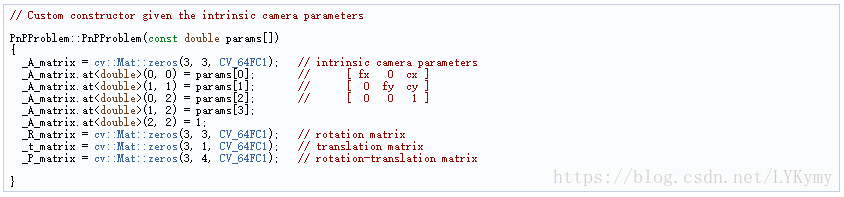
- 对于相机姿势估计,我实现了一个类PnPProblem。 该类有4个属性:给定的校准矩阵,旋转矩阵,平移矩阵和旋转平移矩阵。 您用于估计姿势的相机的固有校准参数是必要的。 为了获得参数,您可以使用方形棋盘和使用OpenCV教程的相机校准来检查相机校准。
- 以下代码是如何在主程序中声明PnPProblem类:
- 以下代码是PnP Problem类如何初始化其属性:
- OpenCV提供四种PnP方法:ITERATIVE,EPNP,P3P和DLS。 根据应用类型,估算方法将有所不同。 在我们想要进行实时应用的情况下,更合适的方法是EPNP和P3P,因为它在寻找最优解时比ITERATIVE和DLS更快。 然而,EPNP和P3P在平面表面前不是特别坚固,并且有时姿势估计似乎具有镜面效果。 因此,在本教程中使用的是ITERATIVE方法,因为要检测的对象具有平面。
- OpenCV Ransac实现要求您提供三个参数:停止算法之前的最大迭代次数,观察点和计算点之间的最大允许距离,将其视为内部,以及获得良好结果的置信度。 您可以调整这些参数以提高算法性能。 增加迭代次数可以获得更准确的解决方案,但需要更多时间才能找到解决方案。 增加重投影错误会缩短计算时间,但您的解决方案将不准确。 降低您的算法的信心会更快,但获得的解决方案将是不准确的。
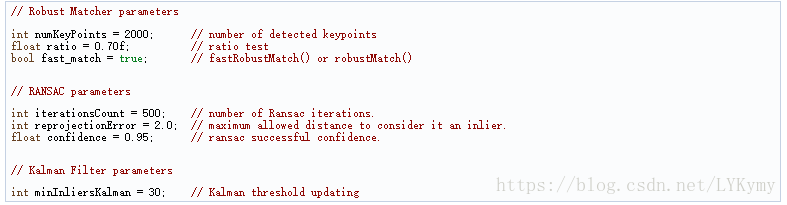
- 以下参数适用于此应用程序:
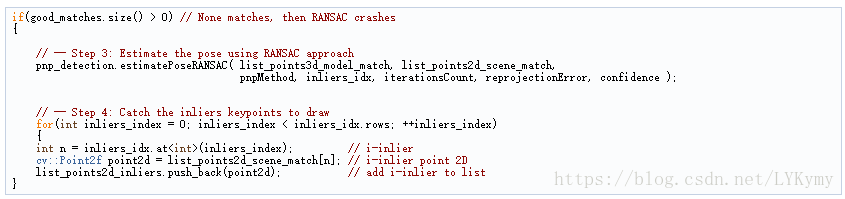
- 以下代码对应于属于PnPProblem类的estimatePoseRANSAC()函数。 该函数在给定一组2D / 3D对应关系,所需的PnP方法,输出内容容器和Ransac参数的情况下估计旋转和平移矩阵:
- 在下面的代码中是主算法的第3步和第4步。 第一个是调用上面的函数,第二个是从Ransac获取输出内部矢量来获取2D场景点以用于绘图目的。 如代码中所示,如果我们有匹配,我们必须确保应用Ransac,在另一种情况下,由于任何OpenCV错误,函数cv :: solvePnPRansac崩溃。
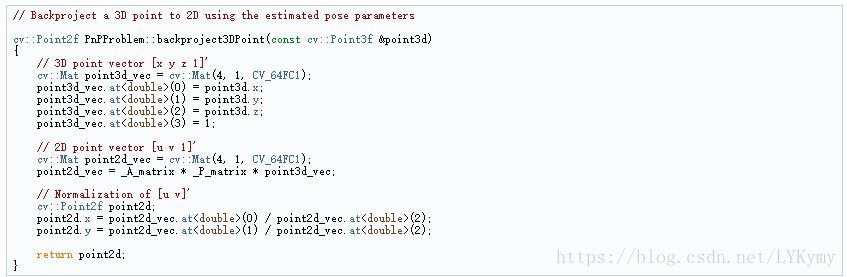
- 以下代码对应于属于PnPProblem类的backproject3DPoint()函数。 该函数将在世界参考系中表示的给定3D点反投影到2D图像上:
- 上述函数用于计算对象Mesh的所有3D点以显示对象的姿势。
- 您还可以更改RANSAC参数和PnP方法:
- 线性卡尔曼滤波器用于不良姿态拒绝。
- 在计算机视觉或机器人领域中常见的是,在应用检测或跟踪技术之后,由于一些传感器错误而获得不良结果。 为了避免在本教程中的这些错误检测,解释了如何实现线性卡尔曼滤波器。 在检测到给定数量的内点之后将应用卡尔曼滤波器。
- 在本教程中,它使用基于线性卡尔曼滤波器的cv :: KalmanFilter的OpenCV实现来进行位置和方向跟踪,以设置动态和测量模型。
- 首先,我们必须定义我们的状态向量,它将具有18个状态:位置数据(x,y,z)及其一阶和二阶导数(速度和加速度),然后以三个欧拉角的形式添加旋转(滚动, 俯仰,下颚)及其一阶和二阶导数(角速度和加速度)
- 其次,我们必须定义测量数量为6:从R和t我们可以提取(x,y,z)和(ψ,θ,φ)。 此外,我们必须定义要应用于系统的控制操作的数量,在这种情况下将为零。 最后,我们必须定义测量之间的差分时间,在这种情况下是1 / T,其中T是视频的帧速率。
- 以下代码对应于卡尔曼滤波器初始化。 首先,设置过程噪声,测量噪声和误差协方差矩阵。 其次,设置转移矩阵,即动态模型,最后设置测量矩阵,即测量模型。
- 您可以调整过程和测量噪声,以提高卡尔曼滤波器的性能。 随着测量噪声的降低,在不良测量之前对算法敏感的会更快收敛。
-
void initKalmanFilter(cv::KalmanFilter &KF, int nStates, int nMeasurements, int nInputs, double dt) { KF.init(nStates, nMeasurements, nInputs, CV_64F); // init Kalman Filter cv::setIdentity(KF.processNoiseCov, cv::Scalar::all(1e-5)); // set process noise cv::setIdentity(KF.measurementNoiseCov, cv::Scalar::all(1e-4)); // set measurement noise cv::setIdentity(KF.errorCovPost, cv::Scalar::all(1)); // error covariance /* DYNAMIC MODEL */ // [1 0 0 dt 0 0 dt2 0 0 0 0 0 0 0 0 0 0 0] // [0 1 0 0 dt 0 0 dt2 0 0 0 0 0 0 0 0 0 0] // [0 0 1 0 0 dt 0 0 dt2 0 0 0 0 0 0 0 0 0] // [0 0 0 1 0 0 dt 0 0 0 0 0 0 0 0 0 0 0] // [0 0 0 0 1 0 0 dt 0 0 0 0 0 0 0 0 0 0] // [0 0 0 0 0 1 0 0 dt 0 0 0 0 0 0 0 0 0] // [0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0] // [0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0] // [0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0] // [0 0 0 0 0 0 0 0 0 1 0 0 dt 0 0 dt2 0 0] // [0 0 0 0 0 0 0 0 0 0 1 0 0 dt 0 0 dt2 0] // [0 0 0 0 0 0 0 0 0 0 0 1 0 0 dt 0 0 dt2] // [0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 dt 0 0] // [0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 dt 0] // [0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 dt] // [0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0] // [0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0] // [0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1] // position KF.transitionMatrix.at<double>(0,3) = dt; KF.transitionMatrix.at<double>(1,4) = dt; KF.transitionMatrix.at<double>(2,5) = dt; KF.transitionMatrix.at<double>(3,6) = dt; KF.transitionMatrix.at<double>(4,7) = dt; KF.transitionMatrix.at<double>(5,8) = dt; KF.transitionMatrix.at<double>(0,6) = 0.5*pow(dt,2); KF.transitionMatrix.at<double>(1,7) = 0.5*pow(dt,2); KF.transitionMatrix.at<double>(2,8) = 0.5*pow(dt,2); // orientation KF.transitionMatrix.at<double>(9,12) = dt; KF.transitionMatrix.at<double>(10,13) = dt; KF.transitionMatrix.at<double>(11,14) = dt; KF.transitionMatrix.at<double>(12,15) = dt; KF.transitionMatrix.at<double>(13,16) = dt; KF.transitionMatrix.at<double>(14,17) = dt; KF.transitionMatrix.at<double>(9,15) = 0.5*pow(dt,2); KF.transitionMatrix.at<double>(10,16) = 0.5*pow(dt,2); KF.transitionMatrix.at<double>(11,17) = 0.5*pow(dt,2); /* MEASUREMENT MODEL */ // [1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0] // [0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0] // [0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0] // [0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0] // [0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0] // [0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0] KF.measurementMatrix.at<double>(0,0) = 1; // x KF.measurementMatrix.at<double>(1,1) = 1; // y KF.measurementMatrix.at<double>(2,2) = 1; // z KF.measurementMatrix.at<double>(3,9) = 1; // roll KF.measurementMatrix.at<double>(4,10) = 1; // pitch KF.measurementMatrix.at<double>(5,11) = 1; // yaw }在下面的代码中是主算法的第5步。 当获得的Ransac之后的内部数量超过阈值时,填充测量矩阵,然后更新卡尔曼滤波器:
-
// -- Step 5: Kalman Filter // GOOD MEASUREMENT if( inliers_idx.rows >= minInliersKalman ) { // Get the measured translation cv::Mat translation_measured(3, 1, CV_64F); translation_measured = pnp_detection.get_t_matrix(); // Get the measured rotation cv::Mat rotation_measured(3, 3, CV_64F); rotation_measured = pnp_detection.get_R_matrix(); // fill the measurements vector fillMeasurements(measurements, translation_measured, rotation_measured); } // Instantiate estimated translation and rotation cv::Mat translation_estimated(3, 1, CV_64F); cv::Mat rotation_estimated(3, 3, CV_64F); // update the Kalman filter with good measurements updateKalmanFilter( KF, measurements, translation_estimated, rotation_estimated);以下代码对应于fillMeasurements()函数,该函数将测量的旋转矩阵转换为欧拉角,并将测量矩阵与测量的平移向量一起填充:
void fillMeasurements( cv::Mat &measurements, const cv::Mat &translation_measured, const cv::Mat &rotation_measured) { // Convert rotation matrix to euler angles cv::Mat measured_eulers(3, 1, CV_64F); measured_eulers = rot2euler(rotation_measured); // Set measurement to predict measurements.at<double>(0) = translation_measured.at<double>(0); // x measurements.at<double>(1) = translation_measured.at<double>(1); // y measurements.at<double>(2) = translation_measured.at<double>(2); // z measurements.at<double>(3) = measured_eulers.at<double>(0); // roll measurements.at<double>(4) = measured_eulers.at<double>(1); // pitch measurements.at<double>(5) = measured_eulers.at<double>(2); // yaw } -
以下代码对应于updateKalmanFilter()函数,该函数更新卡尔曼滤波器并设置估计的旋转矩阵和平移向量。 估计的旋转矩阵来自估计的欧拉角到旋转矩阵。
void updateKalmanFilter( cv::KalmanFilter &KF, cv::Mat &measurement, cv::Mat &translation_estimated, cv::Mat &rotation_estimated ) { // First predict, to update the internal statePre variable cv::Mat prediction = KF.predict(); // The "correct" phase that is going to use the predicted value and our measurement cv::Mat estimated = KF.correct(measurement); // Estimated translation translation_estimated.at<double>(0) = estimated.at<double>(0); translation_estimated.at<double>(1) = estimated.at<double>(1); translation_estimated.at<double>(2) = estimated.at<double>(2); // Estimated euler angles cv::Mat eulers_estimated(3, 1, CV_64F); eulers_estimated.at<double>(0) = estimated.at<double>(9); eulers_estimated.at<double>(1) = estimated.at<double>(10); eulers_estimated.at<double>(2) = estimated.at<double>(11); // Convert estimated quaternion to rotation matrix rotation_estimated = euler2rot(eulers_estimated); } -
第6步设置估计的旋转平移矩阵:
-
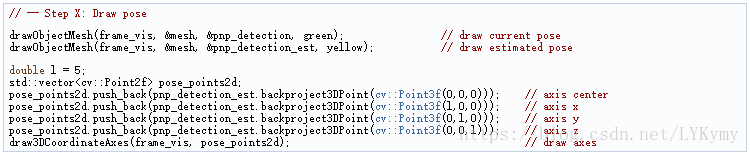
最后一步和可选步骤是绘制找到的姿势。 为此,我实现了一个函数来绘制所有网格3D点和一个额外的参考轴:
-
您还可以修改最小内点来更新卡尔曼滤波器:










效果
以下视频是使用以下参数的解释检测算法实时进行姿势估计的结果: