一般流程参考
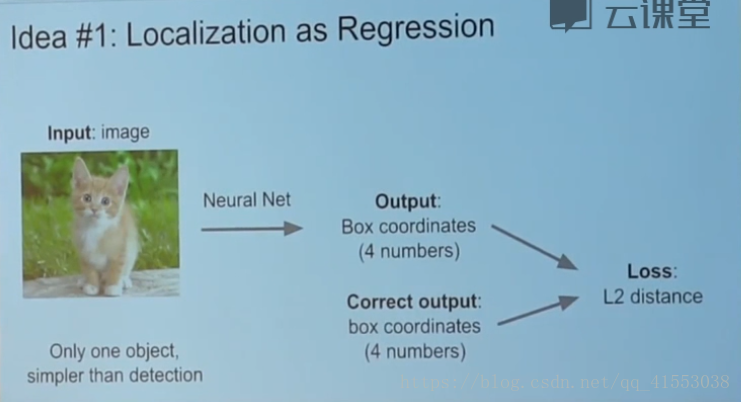
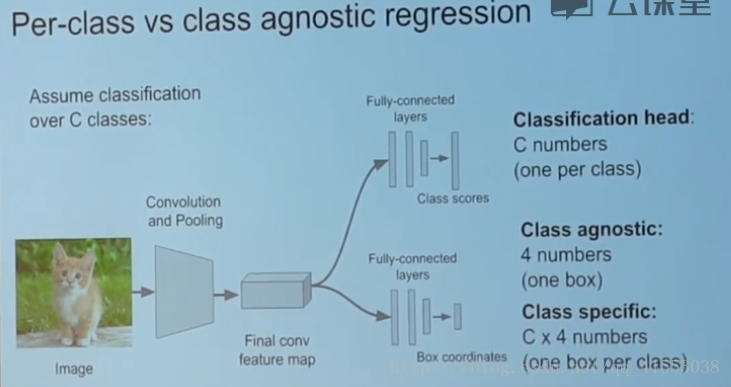
方法一:把定位作为回归问题(很实用可以这样考虑)
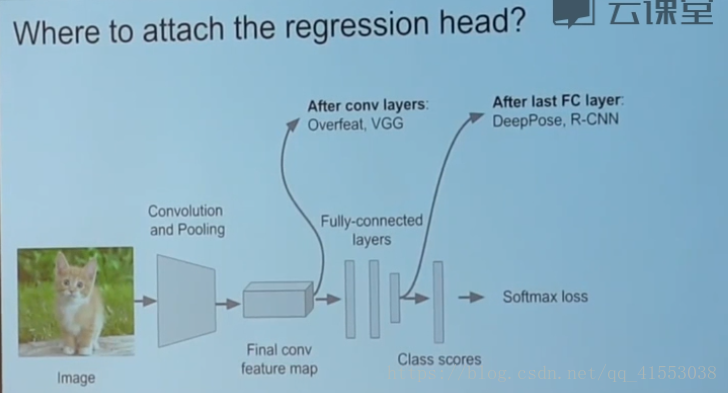
选择防止回归曾的位置,都可以
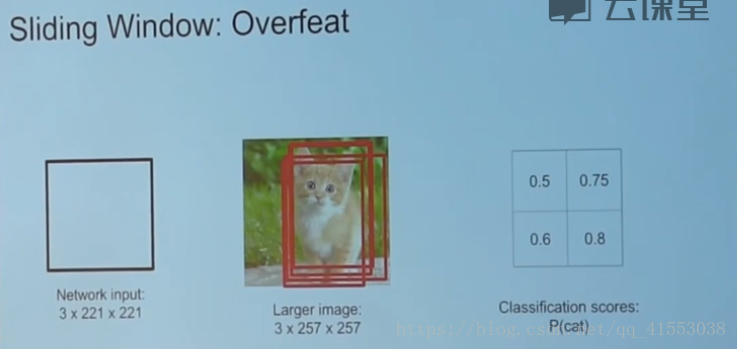
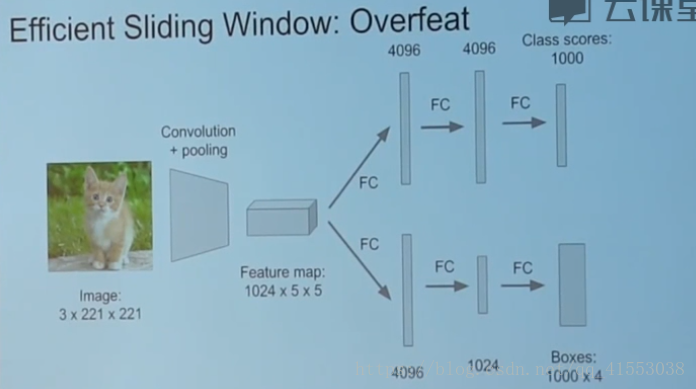
法二:滑动窗法,如overfeat网络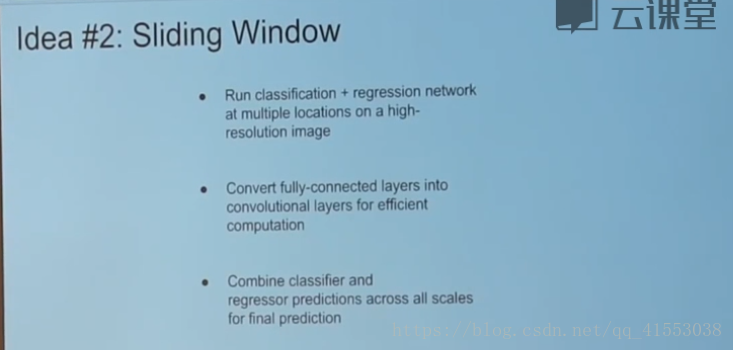
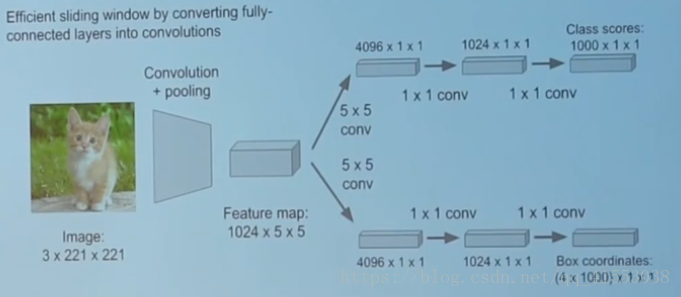
加速(高效)窗口法:不把4096看作向量,而是看作feature map特征映射,
那么只剩下卷积和池化操作
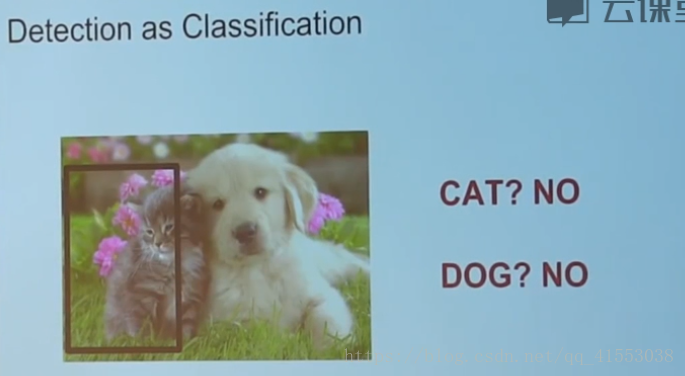
(分类方法)的目标检测
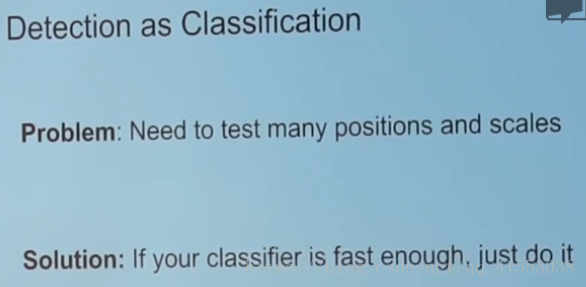
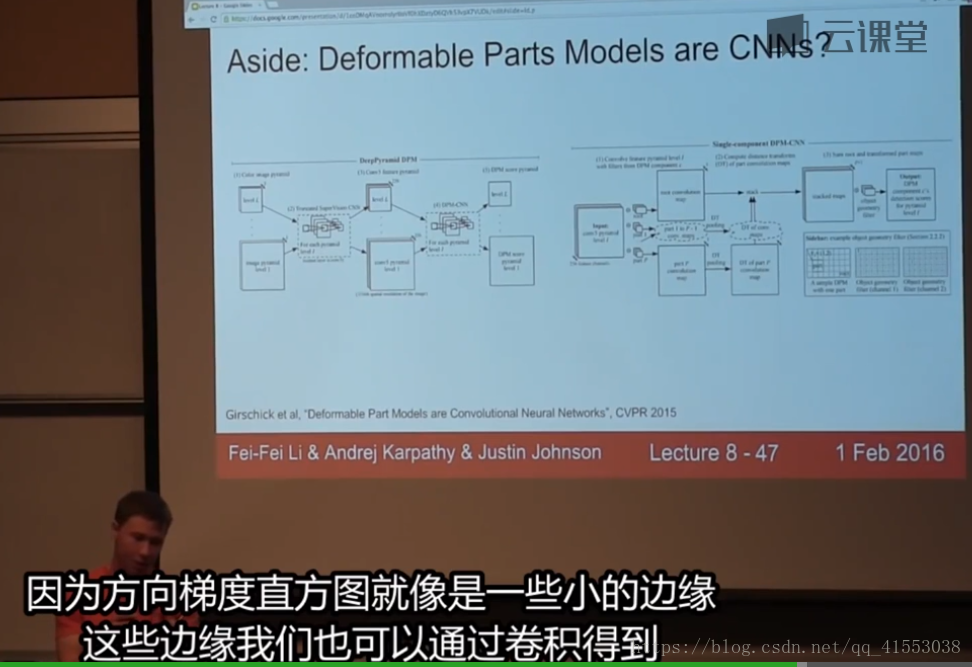
之前的方法有(histogram of oriented gradients)方向梯度直方图HOG目标检测,Deformable Parts Model(DPM深度学习前身,对任何尺度,任何长宽比,任何位置进行预处理,速度很快)
dfm也是一种深度学习
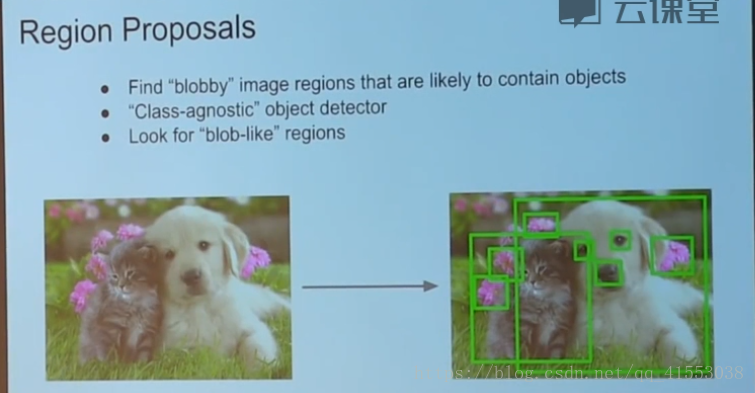
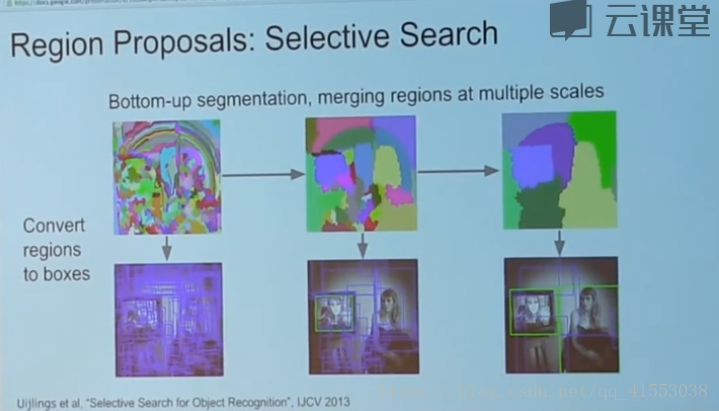
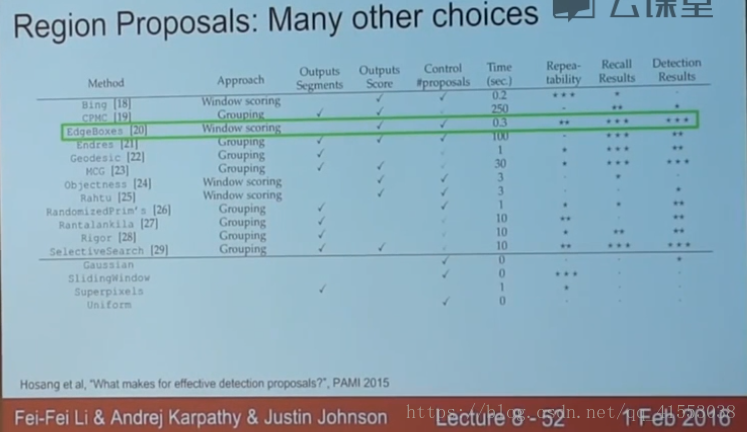
Region proposals区域对象目标检测器
如ssd
其他检测方法EDGEBOXES就很好
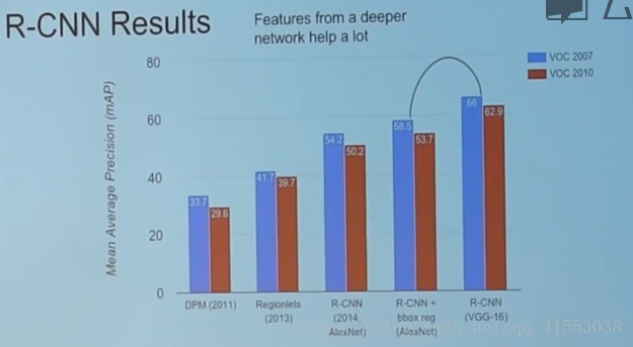
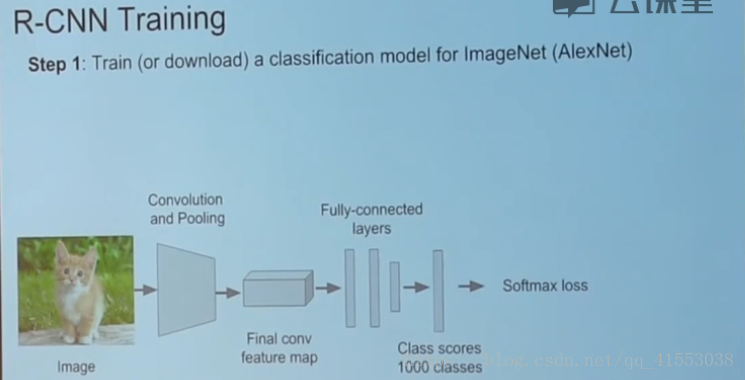
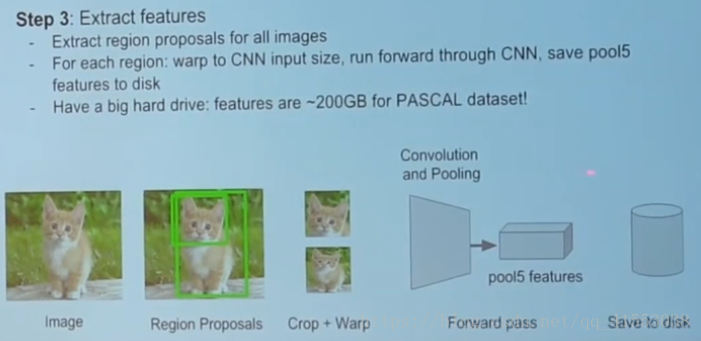
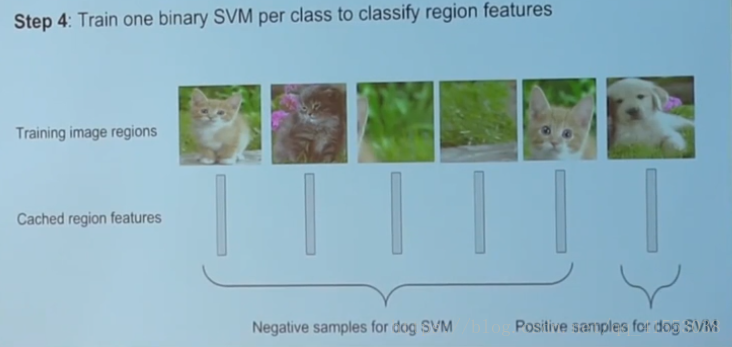
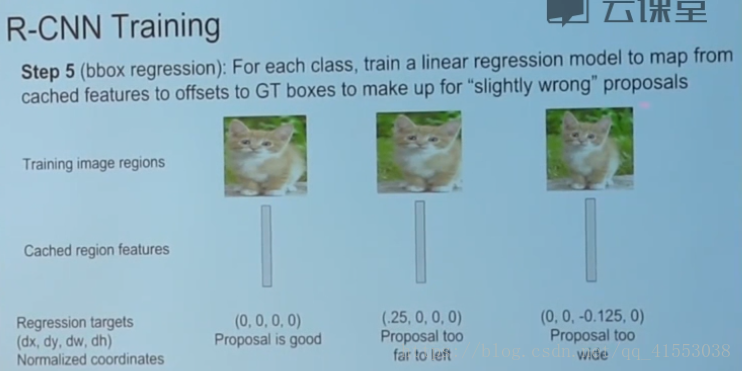
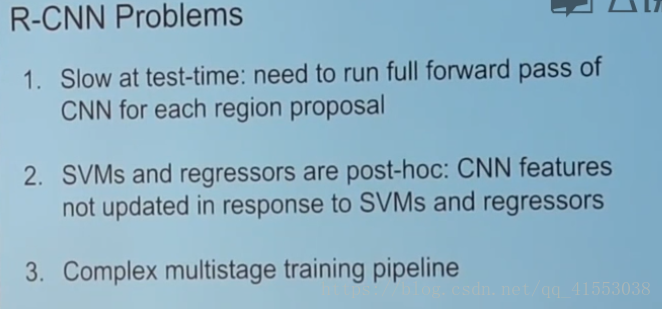
R-CNN
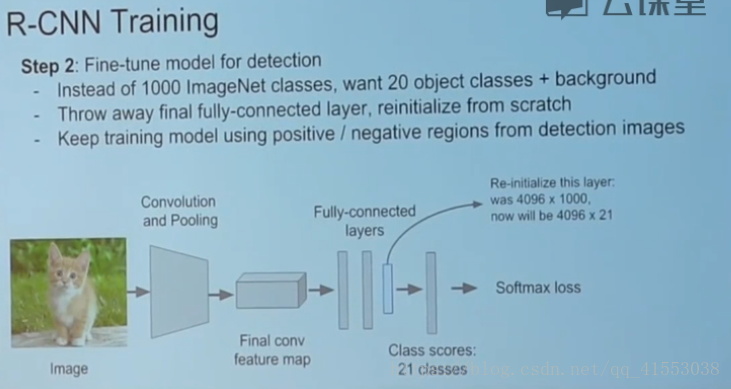
训练过程
针对你的对象类别,在最后加几层
硬盘需求量很大
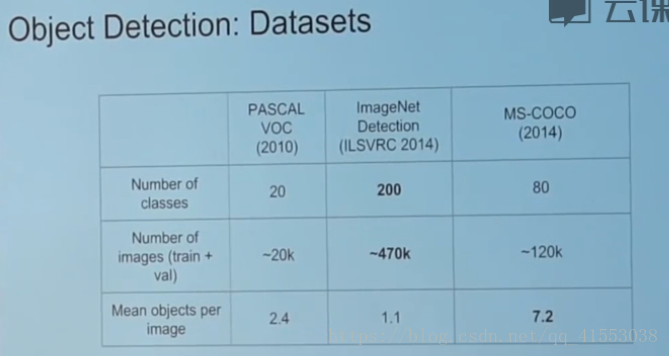
mAP评估


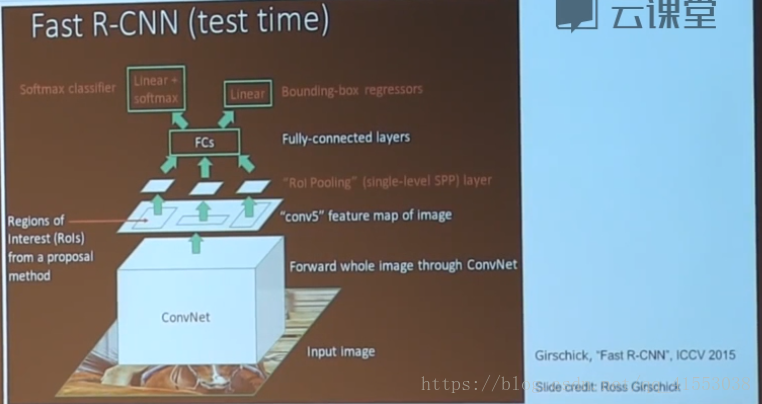
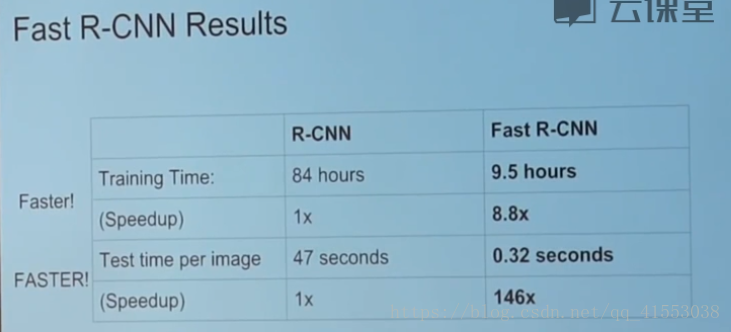
Fast RCNN
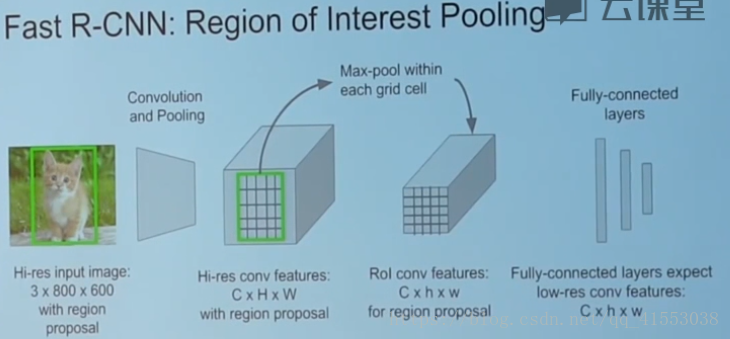
共享不同目标框的卷积特征的计算解决了这个问题
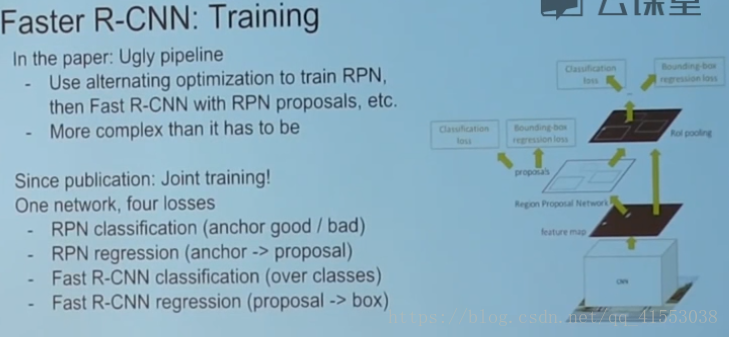
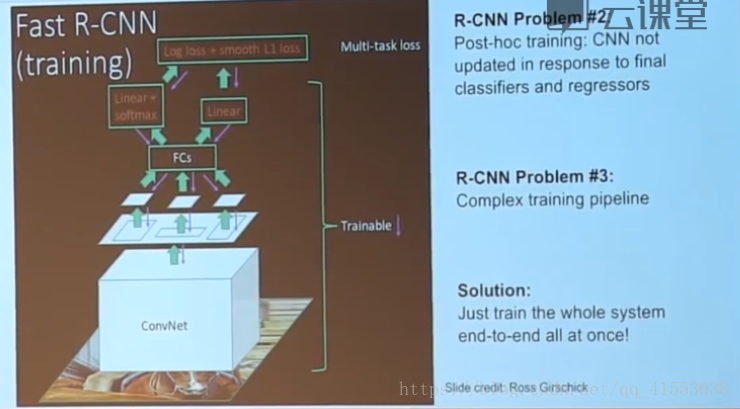
同时训练所有部分
max pooling用BP算法
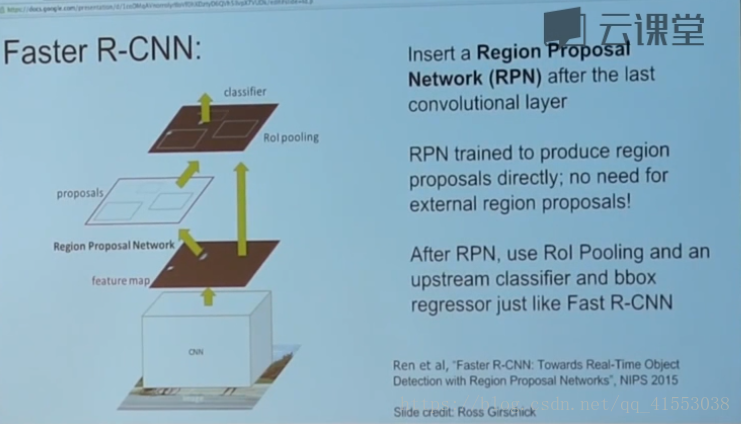
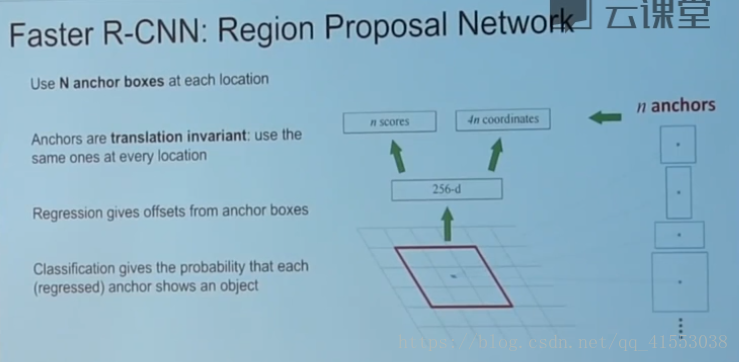
faster RCNN使用RPN区域推荐网络