本文暂定为记录,目前写了一个订阅话题的节点
–2015.10.13
一、首先建一个包
我的工作空间catkin_ws事先建好了,路径是/home/siat/catkin_ws
然后运行以下命令在src文件夹下建立test包
$ cd ~/catkin_ws/src
$ catkin_create_pkg test roscpp注意在包的名字后加上一些基本的依赖,比如roscpp和rospy这样就可以直接调用C++和python节点了,这将会在CMakeLists.txt中出现
find_package(catkin REQUIRED COMPONENTS roscpp)注意如果没有加依赖,而是直接运行
$ catkin_create_pkg test来创建包的,在CMakeLists.txt中是这样的
find_package(catkin REQUIRED)在后面编译C++节点的时候将会提示“对各种ros类下的函数未定义的引用”
二、编写节点文件
ROS里每个节点都是一个执行文件,如果用C++来写的话就是.cpp文件编译生成的可执行文件,而Python就是.py文件。
在~/catkin_ws/src/test/src下新建一个test1.cpp文件作为测试节点,如下
/*test1.cpp
*创建时间:2015.10.13
* 作者:张京林
*/
#include "ros/ros.h"
#include "std_msgs/String.h"
#include <sstream>
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("I heard odom:[%s]",msg->data.c_str());
std::cout<<" chatterCallback run"<<std::endl;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "test1");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("talker",1000,chatterCallback);
std::cout<<" for test1"<<std::endl;
ros::spin();
return 0;
}三、编写CMakeLists.txt文件
这里仅仅在自动生成的CMakeLists.txt文件后面加了以下两句话,并没有额外添加什么依赖
add_executable(test1 src/test1.cpp)
target_link_libraries(test1 ${catkin_LIBRARIES})上面第一句是生成可执行文件的,注意第二句不要漏掉,否则会报错说是里面的init,chatterCallback等函数未定义
四、编译
$ cd ~/catkin_ws
$ catkin_make --pkg test执行编译完成后运行该节点就行了
$ rosrun test test1test1节点订阅了“talker”话题,我们可以找一个节点来测试一下,就拿官网编写节点的教程里的一个talker节点吧。这个节点名字叫talker但是它发布的话题是“chatter”(见代码73行),所以我把这个talker.cpp文件保存到~/catkin_ws/src/test/src下面作为test包下的一个节点,还要修改代码第73行:
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000);
改为
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("talker", 1000);然后在CMakeLists.txt后面加入两句:
add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})最后我的CMakeLists.txt长这样:
cmake_minimum_required(VERSION 2.8.3)
project(test)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS roscpp)
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES test
# CATKIN_DEPENDS other_catkin_pkg
# DEPENDS system_lib
)
add_executable(test1 src/test1.cpp)
target_link_libraries(test1 ${catkin_LIBRARIES})
add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})就行了,重新编译一下test包:
$ cd ~/catkin_ws
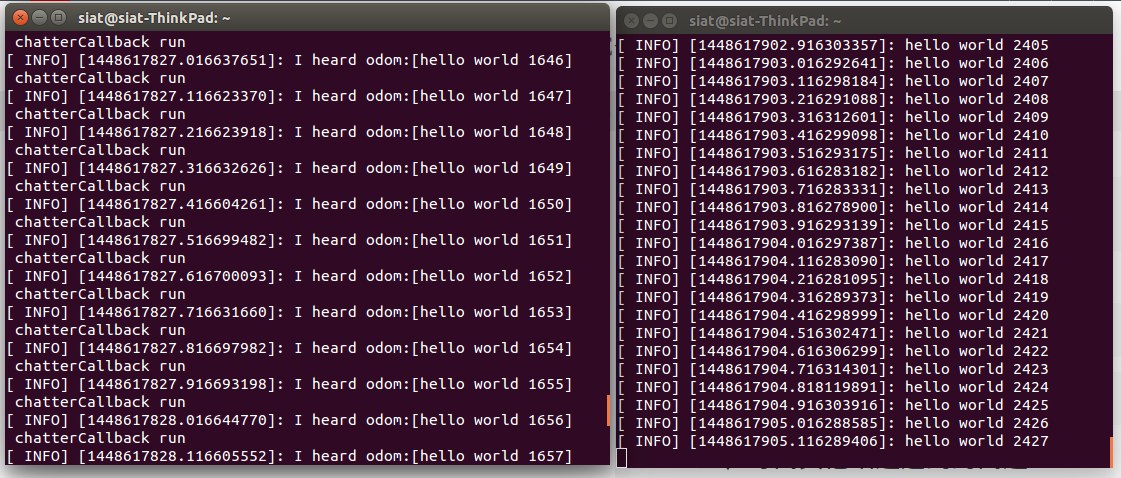
$ catkin_make --pkg test分别开两个终端运行这两个节点:
$ rosrun test talker$ rosrun test test1如图:
五、订阅其他话题遇到的问题
现在我知道消息订阅节点的大体框架了,现在我想订阅其他节点该怎么改写这段程序呢?
假设我要订阅的节点是turtlesim包下面的turtlesim_node节点发布的话题turtle1/pose,那么我该如何做?
(1)首先运行roscore和turtlesim_node,查看话题信息
$ roscore$ rosrun turtlesim turtlesim_node查看话题/turtle1/pose的类型
$ rostopic type /turtle1/pose结果如下:
turtlesim/pose继续运行如下命令查看话题类型turtlesim/pose的详细信息
$ rosmsg show /turtle1/pose结果如下:
float32 x
float32 y
float32 theta
float32 linear_velocity
float32 angular_velocity(2)其次查看相应的头文件
查看http://docs.ros.org/api/turtlesim/html/index-msg.html中的Wiki page for turtlesim,转到http://wiki.ros.org/turtlesim页面,发现节点列表里有如下内容:
2.1.2 Published Topics
turtleX/pose (turtlesim/Pose)
The x, y, theta, linear velocity, and angular velocity of turtleX.
进入turtlesim/Pose链接后有如下内容:
turtlesim/Pose Message
File: turtlesim/Pose.msg
Raw Message Definition
float32 x
float32 y
float32 theta
float32 linear_velocity
float32 angular_velocity
Compact Message Definition
float32 x
float32 y
float32 theta
float32 linear_velocity
float32 angular_velocity
autogenerated on Sun, 20 Sep 2015 23:15:36所以要使用该话题的内容需要包含turtlesim/Pose.h头文件
所以在文件包含的时候加入语句:
#include "turtlesim/Pose.h"注:ROS各种API查询
http://docs.ros.org/indigo/api/
http://docs.ros.org/api/
(3)编写回调函数
因为float32 x表明话题内容中的数据类型有float32类型,这是包内自己定义的类型,接收这些数据需要用到C++中的float类型变量,这个不需要额外添加头文件包含;
在opt/ros/indigo/中查找turtlesim文件夹,找到其中的Pose.h,发现如下语句:
typedef boost::shared_ptr< ::turtlesim::Pose const> PoseConstPtr;故而在回调函数的参数列表中消息类型应该写const turtlesim::PoseConstPtr&
注:turtlesim/Pose.h是turtlesim/Pose.msg自动生成的头文件,这类由.msg生成的消息头文件一般名字都不变,后缀为.h
且许多消息类型格式都是[包名]::[消息文件名][ConstPtr]&
比如:const turtlesim::PoseConstPtr&、
const geometry_msgs::TwistConstPtr&等
回调函数如下:
void chatterCallback_pose(const turtlesim::PoseConstPtr& msg)
{
float x, y, theta;
x=msg->x;
y=msg->y;
theta=msg->theta;
ROS_INFO("I heard pose x:[%f] y:[%f] z:[%f]",x, y, theta);
}这样就可以取出话题/turtle1/pose中的数据x,y,theta用来运算了,以下是主要文件代码:
test1.cpp
/*test1.cpp
*创建时间:2015.10.13
* 作者:张京林
*/
#include "ros/ros.h"
#include "std_msgs/String.h"
#include "turtlesim/Pose.h"
//#include <sstream>
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("I heard odom:[%s]",msg->data.c_str());
std::cout<<" chatterCallback run"<<std::endl;
}
void chatterCallback_pose(const turtlesim::PoseConstPtr& msg)
{
float x, y, theta;
x=msg->x;
y=msg->y;
theta=msg->theta;
ROS_INFO("I heard pose x:[%f] y:[%f] z:[%f]",x, y, theta);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "test1");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("turtle1/pose",1000,chatterCallback_pose);
//std::cout<<" for test1"<<std::endl;
ros::spin();
return 0;
}
CMakeLists.txt文件不用再做修改了,还是前面说的在自动生成的文件末尾加两句话用来生成节点test1的可执行文件:
add_executable(test1 src/test1.cpp)
target_link_libraries(test1 ${catkin_LIBRARIES})查看前面是否依赖了roscpp,如果没有,在REQUIRED后面加上 COMPONENTS roscpp
find_package(catkin REQUIRED COMPONENTS roscpp)修改完后编译这个包:
$ cd catkin_ws
$ catkin_make --pkg test(4)运行消息订阅节点
先运行turtlesim包中的turtlesim_node节点:
$ rosrun turtlesim turtlesim_node显示/turtle1/pose话题:
$ rostopic echo /turtle1/pose得到如下结果:
x: 5.544444561
y: 5.544444561
theta: 0.0
linear_velocity: 0.0
angular_velocity: 0.0
---再运行test包中的test1节点:
$ rosrun test test1结果如下:
[ INFO] [1444898679.863117000]: I heard pose x:[5.544445] y:[5.544445] z:[0.000000]