参考博客地址:https://blog.csdn.net/wengge987/article/details/50619851
参考ROS Wiki:http://wiki.ros.org/roscpp/Overview/Callbacks%20and%20Spinning
参考代码地址:https://github.com/wenglihong/wlh_ros_demo/tree/master/multi_thread_demo
通过给订阅者节点开辟多个线程的方法来接受多个话题消息,确保通信畅通。
以下为三个发布者的代码:
multi_topic_publisher1

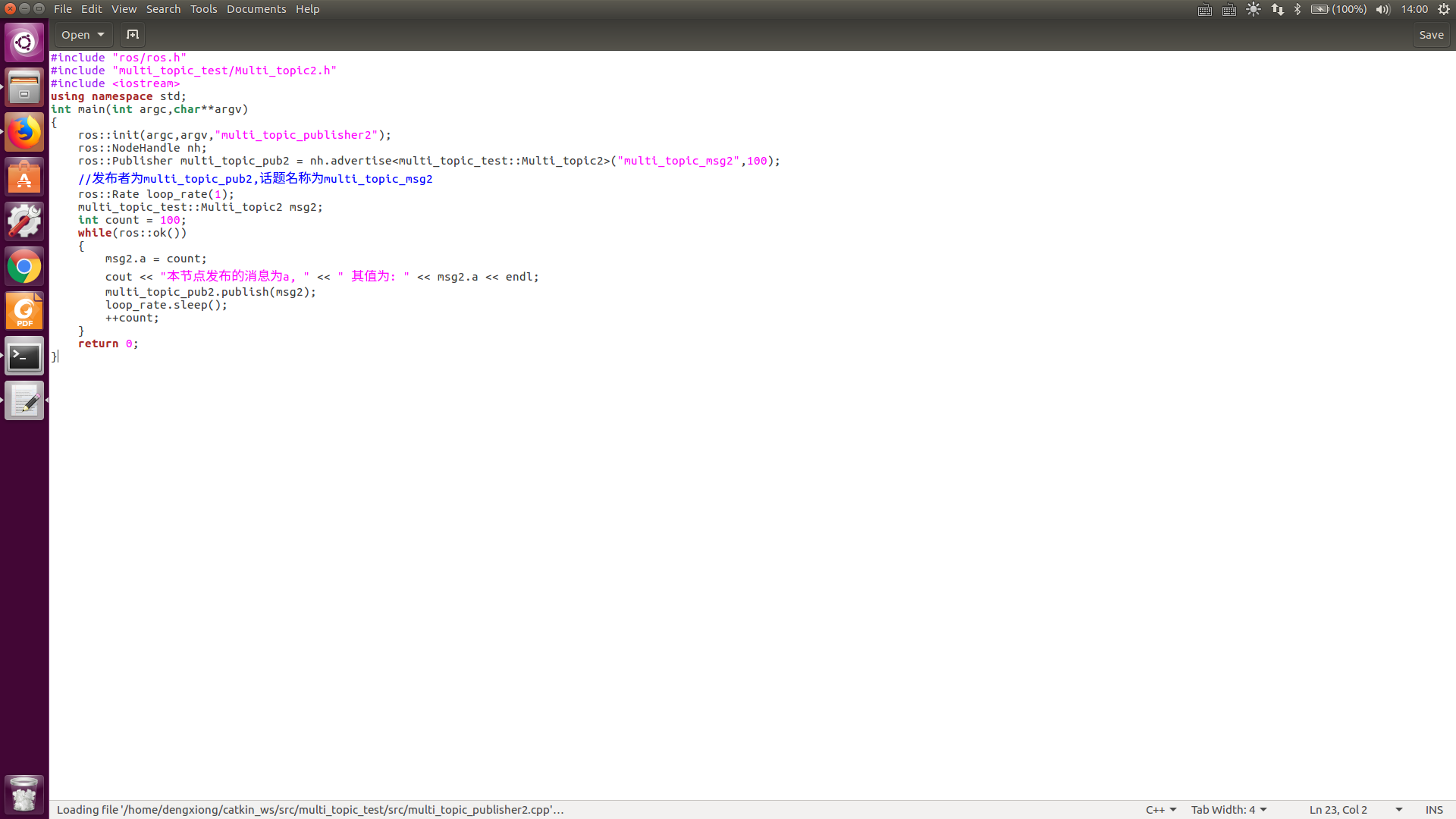
multi_topic_publisher2
multi_topic_publisher3

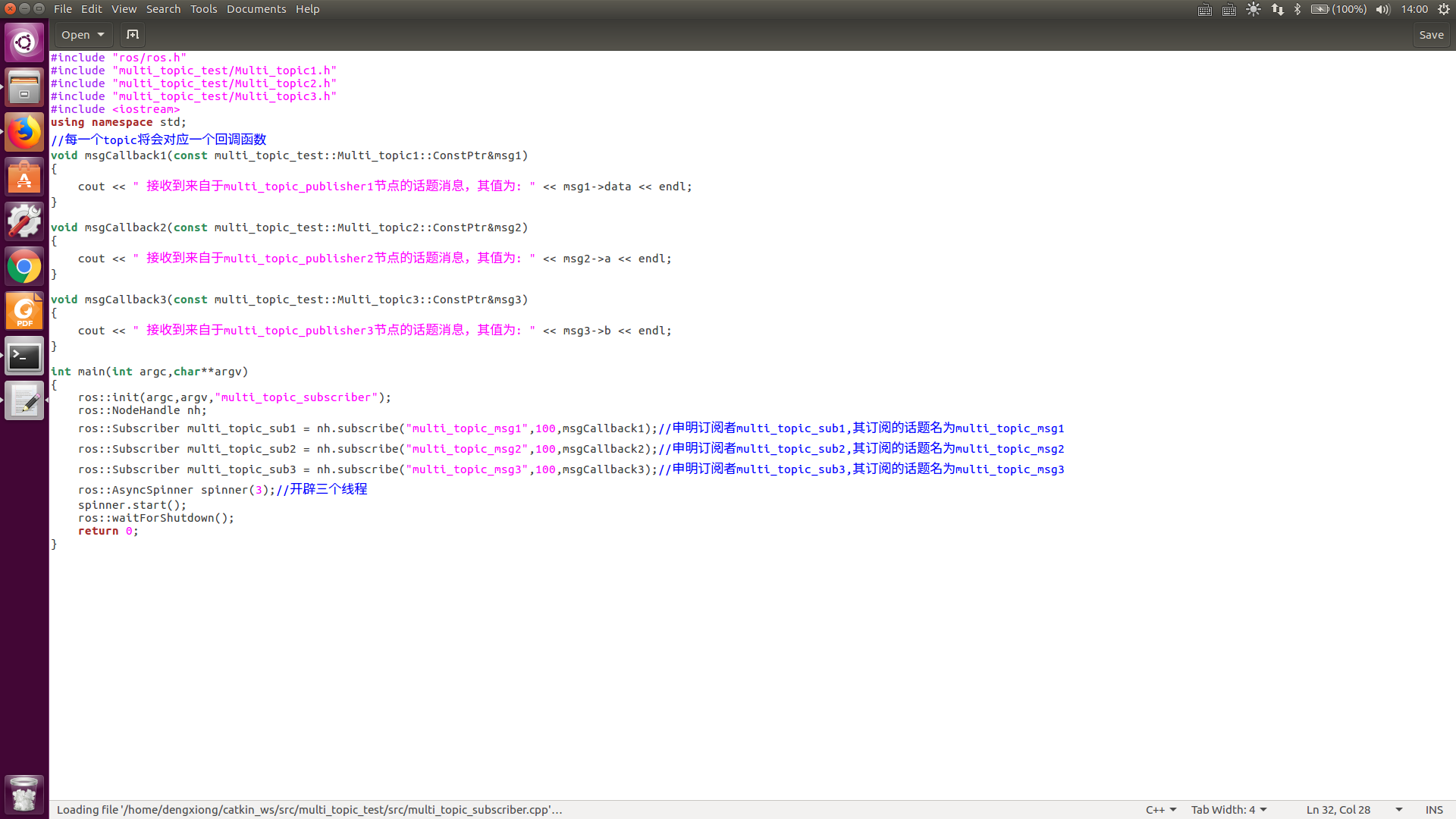
multi_topic_subscriber
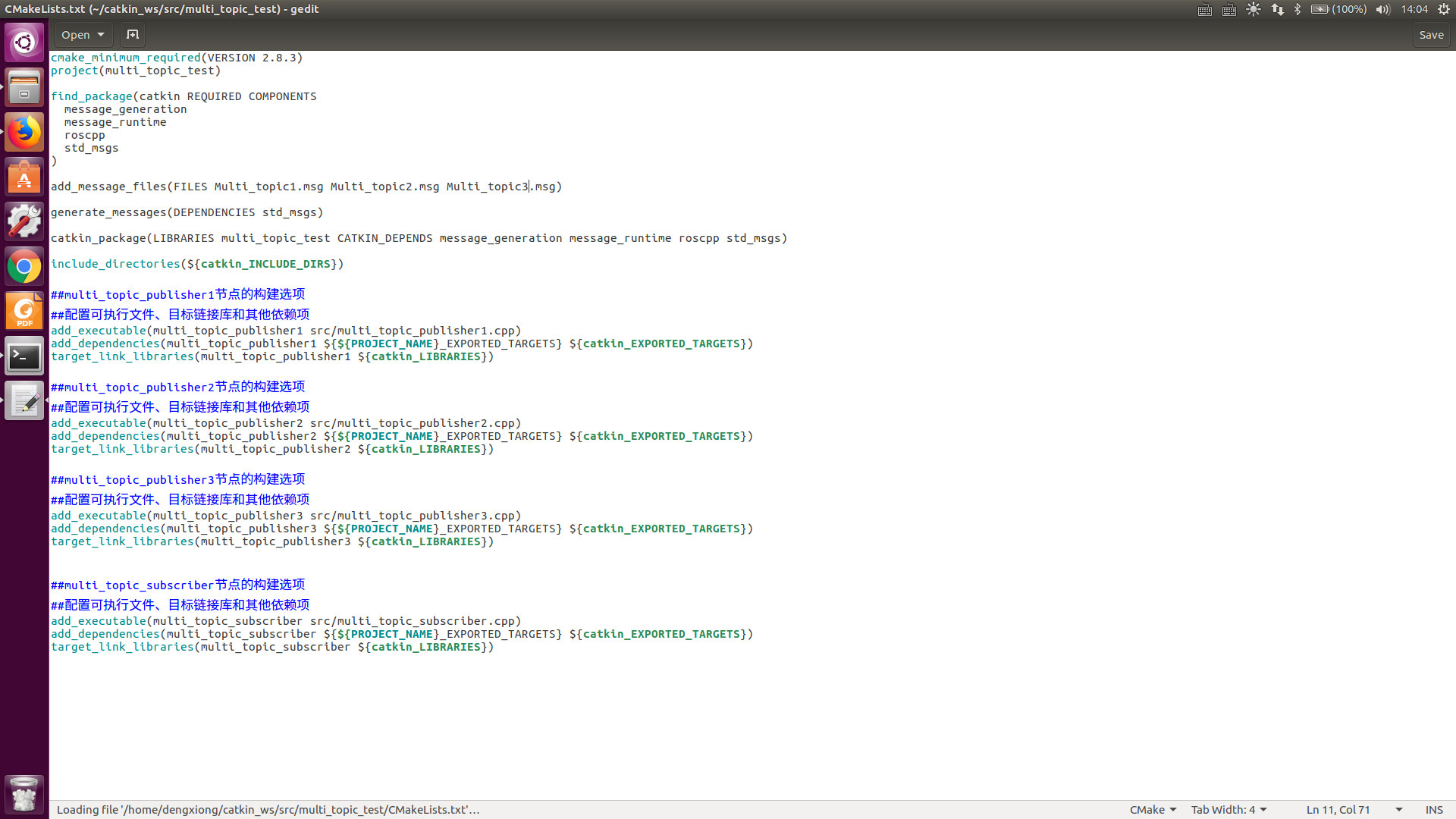
功能包的CMakeLists.txt文件为:
最后运行结果给个图:
