1 找轮廓findContours
findContours有两个接口,区别在于需不需要输出hierarchy层次结构(可用于分析轮廓间关系,一般比较少用到)。
直接找最外层轮廓RETR_EXTERNAL,结果输出全部轮廓点CHAIN_APPROX_NONE
vector<vector<Point>> contours;
findContours(edges_D,contours,RETR_EXTERNAL,CHAIN_APPROX_NONE); 2 轮廓大小排序
找完轮廓后,绝大部分需求就是再获取最大轮廓,简单的可以按照轮廓周长或轮廓面积来排序。
排序函数直接用std库:
std::sort(contours.begin(),contours.end(),ContoursSortFun);
需要另外声明排序规则函数ContoursSortFun
按轮廓周长(轮廓点数量)排序:
static inline bool ContoursSortFun(vector<cv::Point> contour1,vector<cv::Point> contour2)
{
return (contour1.size() > contour2.size());
}
按轮廓面积排序:
static inline bool ContoursSortFun(vector<cv::Point> contour1,vector<cv::Point> contour2)
{
return (cv::contourArea(contour1) > cv::contourArea(contour2));
}
完续后,contours中第一个元素contours[0]即是最大轮廓.
3 绘制最大轮廓
Mat Img(edges_D.size(),CV_8UC3,Scalar(0));
drawContours(Img,contours,0,Scalar(255,0,0),-1);
drawContours中第3个参数为0说明绘制第一个轮廓;最后一个参数-1代表绘制时填充轮廓,若大于0则指轮廓厚度。
4 一个例程
下边用效果图对比一下findContours函数中各参数取不同值时,向量contours和hierarchy的内容如何变化,有何异同。
主体程序如下:
#include "core/core.hpp"
#include "highgui/highgui.hpp"
#include "imgproc/imgproc.hpp"
#include "iostream"
using namespace std;
using namespace cv;
int main(int argc,char *argv[])
{
Mat imageSource=imread(argv[1],0);
imshow("Source Image",imageSource);
Mat image;
GaussianBlur(imageSource,image,Size(3,3),0);
Canny(image,image,100,250);
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
findContours(image,contours,hierarchy,RETR_TREE,CHAIN_APPROX_SIMPLE,Point());
Mat imageContours=Mat::zeros(image.size(),CV_8UC1);
Mat Contours=Mat::zeros(image.size(),CV_8UC1); //绘制
for(int i=0;i<contours.size();i++)
{
//contours[i]代表的是第i个轮廓,contours[i].size()代表的是第i个轮廓上所有的像素点数
for(int j=0;j<contours[i].size();j++)
{
//绘制出contours向量内所有的像素点
Point P=Point(contours[i][j].x,contours[i][j].y);
Contours.at<uchar>(P)=255;
}
//输出hierarchy向量内容
char ch[256];
sprintf(ch,"%d",i);
string str=ch;
cout<<"向量hierarchy的第" <<str<<" 个元素内容为:"<<endl<<hierarchy[i]<<endl<<endl;
//绘制轮廓
drawContours(imageContours,contours,i,Scalar(255),1,8,hierarchy);
}
imshow("Contours Image",imageContours); //轮廓
imshow("Point of Contours",Contours); //向量contours内保存的所有轮廓点集
waitKey(0);
return 0;
}
程序中所用原始图像如下:

通过调整第四个参数mode——轮廓的检索模式、第五个参数method——轮廓的近似方式和不同的偏移量Point(),就可以得到以下效果。
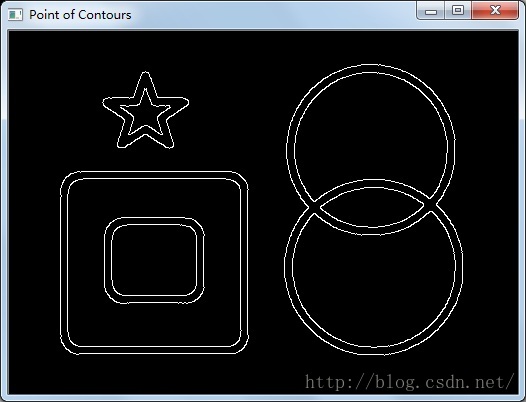
一、mode取值“CV_RETR_EXTERNAL”,method取值“CV_CHAIN_APPROX_NONE”,即只检测最外层轮廓,并且保存轮廓上所有点:
轮廓:
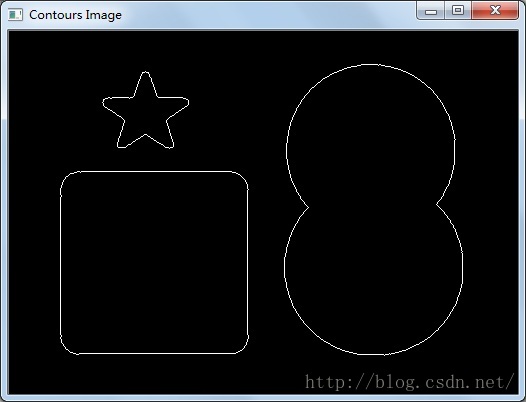
只有最外层的轮廓被检测到,内层的轮廓被忽略
contours向量内所有点集:
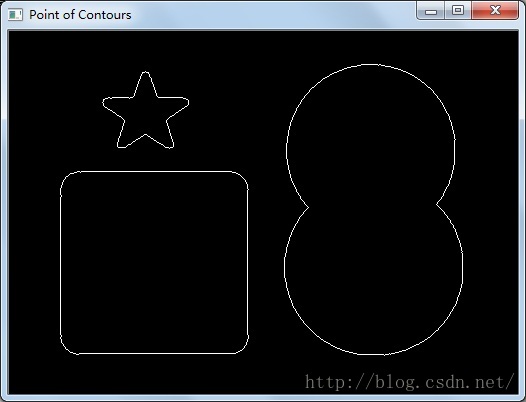
保存了所有轮廓上的所有点,图像表现跟轮廓一致
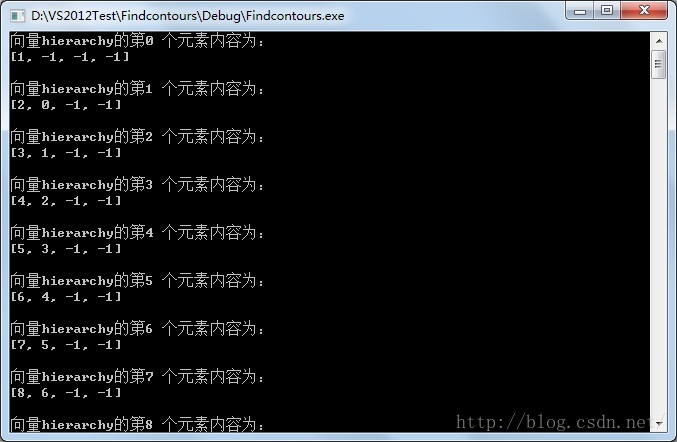
hierarchy向量:
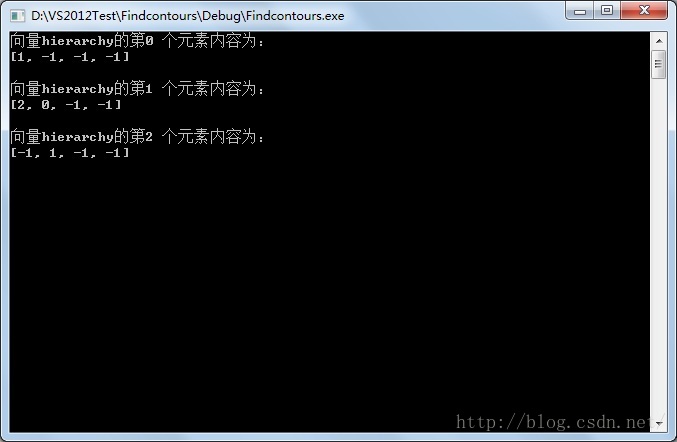
重温一下hierarchy向量————向量中每个元素的4个整形分别对应当前轮廓的后一个轮廓、前一个轮廓、父轮廓、内
嵌轮廓的索引编号。
本次参数配置下,hierarchy向量内有3个元素,分别对应于3个轮廓。以第2个轮廓(对应向量内第1个元素)为例,
内容为[2,0,-1,-1], “2”表示当前轮廓的后一个轮廓的编号为2,“0”表示当前轮廓的前一个轮廓编号为0,其后2
个“-1”表示为空,因为只有最外层轮廓这一个等级,所以不存在父轮廓和内嵌轮廓。
二、 mode取值“CV_RETR_LIST”,method取值“CV_CHAIN_APPROX_SIMPLE”,即检测所有轮廓,但各轮廓之间彼此独立,不建立等级关系,并且仅保存轮廓上拐点信息:
检测到的轮廓跟上文“一”中是一致的,不再显示。
contours向量内所有点集:
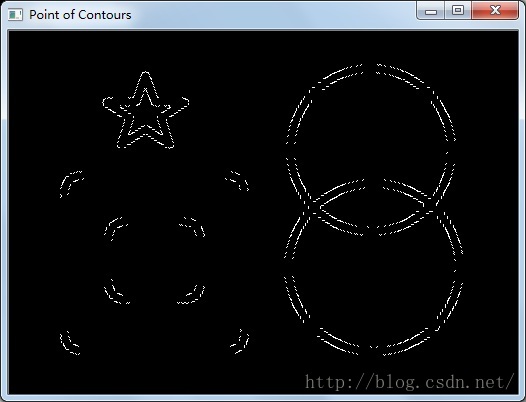
contours向量中所有的拐点信息得到了保留,但是拐点与拐点之间直线段的部分省略掉了。
hierarchy向量(截取一部分):
本次参数配置下,检测出了较多轮廓。第1、第2个整形值分别指向上一个和下一个轮廓编号,由于本次配置mode取
值“RETR_LIST”,各轮廓间各自独立,不建立等级关系,所以第3、第4个整形参数为空,设为值-1。
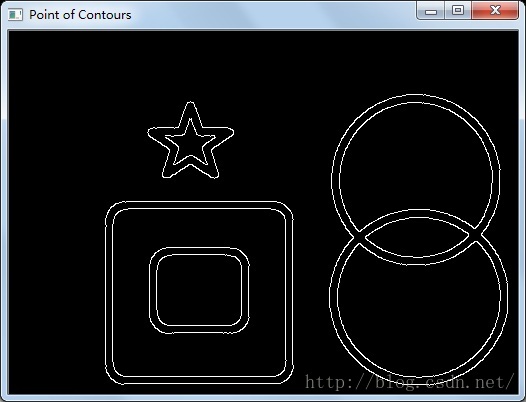
三、mode取值“CV_RETR_TREE”,method取值“CV_CHAIN_APPROX_NONE”,即检测所有轮廓,轮廓间建立外层、内层的等级关系,并且保存轮廓上所有点。
contours向量内所有点集:
所有内外层轮廓都被检测到,contours点集组成的图形跟轮廓表现一致。
hierarchy向量(截取一部分)
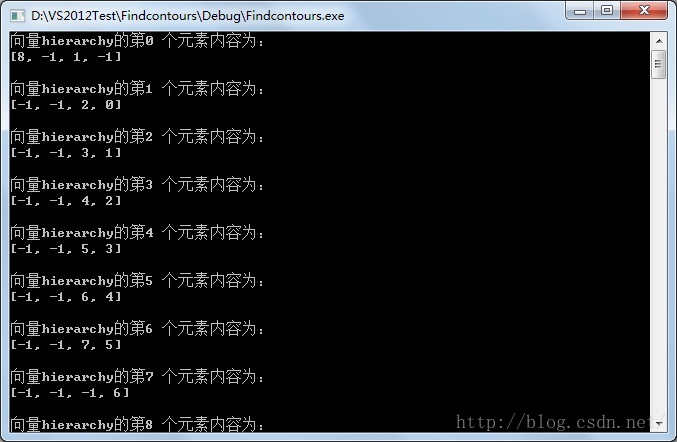
本次参数配置要求检测所有轮廓,每个轮廓都被划分等级,最外围、第一内围、第二内围等等,所以除第1个最后一
个轮廓外,其他轮廓都具有不为-1的第3、第4个整形参数,分别指向当前轮廓的父轮廓、内嵌轮廓索引编号。
四、Point()偏移量设置
使用三中的参数配置,设置偏移量Point为Point(45,30)。
此时轮廓图像为:
可以看到轮廓图像整体向右下角有一个偏转,偏转量就是设置的(45,30)。
这个偏移量的设置不能过大或过小(负方向上的过小),若图像上任一点加上该偏移量后超出图像边界,程序会内存
溢出报错。
findContours函数的各参数就探讨到此,其他参数配置的情况大同小异。值得关注一下的是绘制轮廓的函数
drawContours中最后一个参数是一个Point类型的offset,这个offset跟findContours函数中的offset含义一致,设置之
后所绘制的轮廓是原始轮廓上所有像素点加上该偏移量offset后的效果。
当所分析图像是另外一个图像的ROI的时候,这个offset偏移量就可以大显身手了。通过加减这个偏移量,就可以把
ROI图像的检测结果投影到原始图像对应位置上。
findContours函数参数说明及相关函数
findContours函数,这个函数的原型为:
void findContours(InputOutputArray image, OutputArrayOfArrays contours, OutputArray hierar-
chy, int mode, int method, Point offset=Point())- 1
- 2
参数说明
输入图像image必须为一个2值单通道图像
contours参数为检测的轮廓数组,每一个轮廓用一个point类型的vector表示;
hiararchy参数和轮廓个数相同,每个轮廓contours[ i ]对应4个hierarchy元素hierarchy[ i ][ 0 ] ~hierarchy[ i ][ 3 ],分别表示后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓的索引编号,如果没有对应项,该值设置为负数。
mode表示轮廓的检索模式
CV_RETR_EXTERNAL表示只检测外轮廓
CV_RETR_LIST检测的轮廓不建立等级关系
CV_RETR_CCOMP建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层。
CV_RETR_TREE建立一个等级树结构的轮廓。具体参考contours.c这个demo
method为轮廓的近似办法
CV_CHAIN_APPROX_NONE存储所有的轮廓点,相邻的两个点的像素位置差不超过1,即max(abs(x1-x2),abs(y2-y1))==1
CV_CHAIN_APPROX_SIMPLE压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息
CV_CHAIN_APPROX_TC89_L1,CV_CHAIN_APPROX_TC89_KCOS使用teh-Chinl chain 近似算法
offset表示代表轮廓点的偏移量,可以设置为任意值。对ROI图像中找出的轮廓,并要在整个图像中进行分析时,这个参数还是很有用的。
findContours后会对输入的2值图像改变,所以如果不想改变该2值图像,需创建新mat来存放,findContours后的轮廓信息contours可能过于复杂不平滑,可以用approxPolyDP函数对该多边形曲线做适当近似;
contourArea函数可以得到当前轮廓包含区域的大小,方便轮廓的筛选
findContours经常与drawContours配合使用,用来将轮廓绘制出来。其中第一个参数image表示目标图像,第二个参数contours表示输入的轮廓组,每一组轮廓由点vector构成,第三个参数contourIdx指明画第几个轮廓,如果该参数为负值,则画全部轮廓,第四个参数color为轮廓的颜色,第五个参数thickness为轮廓的线宽,如果为负值或CV_FILLED表示填充轮廓内部,第六个参数lineType为线型,第七个参数为轮廓结构信息,第八个参数为maxLevel
得到了复杂轮廓往往不适合特征的检测,这里再介绍一个点集凸包络的提取函数convexHull,输入参数就可以是contours组中的一个轮廓,返回外凸包络的点集
还可以得到轮廓的外包络矩形,使用函数boundingRect,如果想得到旋转的外包络矩形,使用函数minAreaRect,返回值为RotatedRect;也可以得到轮廓的外包络圆,对应的函数为minEnclosingCircle;想得到轮廓的外包络椭圆,对应的函数为fitEllipse,返回值也是RotatedRect,可以用ellipse函数画出对应的椭圆;
如果想根据多边形的轮廓信息得到多边形的多阶矩,可以使用类moments,这个类可以得到多边形和光栅形状的3阶以内的所有矩,类内有变量m00,m10,m01,m20,m11,m02,m30,m21,m12,m03,比如多边形的质心为 x = m10 / m00,y = m01 / m00。
如果想获得一点与多边形封闭轮廓的信息,可以调用pointPolygonTest函数,这个函数返回值为该点距离轮廓最近边界的距离,为正值为在轮廓内部,负值为在轮廓外部,0表示在边界上。
OpenCV中findContours轮廓提取一个边缘只对应的一个轮廓
众所周知,图像查找轮廓可以用findContours函数解决,但是不知道大家发现一个问题没有,有时候输入图像,得到的结果会出现图像中一条边缘有查找到两个轮廓。当然只提取最外轮廓是不会出现重复情况,但设置提取所有轮廓会出现两个轮廓,对于利用得到的轮廓进一步处理带来不必要的麻烦。现在网上很多讲解findContours()函数都是讲解参数的,当真的用到这个函数会发现跟自己的结果并不如意。下面我就以我有限的感悟谈一下如何利用findContours()得到一条边缘得到对应的一个轮廓,当然不会去修改这个函数的代码。
findContours()函数参数讲解
- 输入image;
- 输出contours,是二维向量的Point。如:vector< vector>contours;
- hierarchy;每个轮廓的信息,后面要用到这些重要信息。
- mode;轮廓检索模式,网上很多参数说明。
- method;轮廓的近似办法。
- offset;我没用过,直接默认参数。
提取一个边缘只对应的一个轮廓
这里说一下mode这个参数。
RETR_EXTERNAL:表示只检测最外层轮廓,意思是图像中独立的个体只检测最外层轮廓,包含在里面的轮廓不会提取出来。
RETR_LIST:提取所有轮廓,并放置在list中,不建立等级关系。意思就是提取出来的轮廓之间是没有联系的。
RETR_CCOMP:提取所有轮廓,并且将其组织为双边结构。意思就是第一层为它的外围轮廓,第二层为内围轮廓,利用这个参数可以筛选出来一个独立边缘只对应一个轮廓。
RETR_TREE:提取所有轮廓,并且重新建立网状轮廓结构。它体现出来的轮廓联系很紧密,比如说一个轮廓在另外一个轮廓的里面,轮廓里面又包含轮廓。
对了,在参数method中有个标识符–CV_CHAIN_CODE,是生成Freeman码的,但是OpenCV提供的C++接口好像不好提取,还没有深究,C接口的代码我有,网上荡的,在百度知道搜的,那不缺大神哦。
前面讲了那么多,进入正题吧。其实所有的轮廓关系在参数hierarchy中体现,大家可以调试看看那里面的值。hierarchy[i][0]–hierarchy[i][3]依次表示轮廓的后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓,如果没有对应项,设置为-1。
我们要得到一个边缘只对应的一个轮廓,需要在mode参数设置为RETR_CCOMP,表示双层结构,利用hierarchy中的信息筛选出轮廓。
如下图,其实只有四个轮廓,但查找出来了七个轮廓。
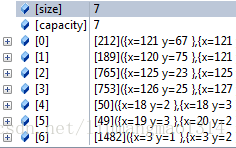
hierarchy信息中对应的 值
| 元素 | 值 |
|---|---|
| hierarchy[ 0] | 2,-1,1,-1 |
| hierarchy[ 1] | -1,-1,-1,0 |
| hierarchy[ 2] | 4,0,3,-1 |
| hierarchy[ 3] | -1,-1,-1,2 |
| hierarchy[ 4] | 6,2,5,-1 |
| hierarchy[ 5] | -1,-1,-1,4 |
| hierarchy[ 6] | -1,4,-1,-1 |
由上表可以发现,每个hierarchy[i][0]对应的值指示下一个轮廓,注意,这里下一个轮廓指的是另外的轮廓,不是同一个边缘的另外一个轮廓。所以我们利用这个信息可以筛选出一个边缘的一条轮廓,分别是0->2->4->6四条轮廓。
贴一下代码:
vector<int>Index;
for(int i=0;i<contours.size();i++)
{
if(hierarchy[i][0]==-1)
{
break;
}
Index.push_back(i);
}- 输出的结果Index为(0,2,4,6)。