机器人的坐标系分为关节坐标系和直角坐标系(笛卡尔坐标系)。坐标系是为了确定机器人的位置和姿态而在机器人或空间上定义的位置指标系统。
1. 机器人关节坐标系
机器人的关节坐标系用来描叙机器人每个独立关节的运动,对于六轴串联型机械臂,关节类型均为转动关节。在关节坐标系下,将机器人末端移动到期望位置,可以依次驱动各关节运动,从而让机器人末端到达指定位置。
我们会规定机器人在关节坐标系下的零点位置,一般情况下,六轴机械臂的零点位置如下图所示,我们也叫这个位置为“门位置”。
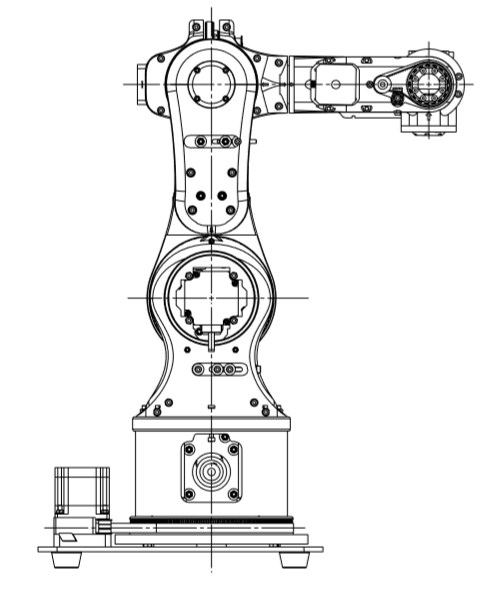
图 1
针对机器人的关节坐标系,我们还需要规定各个关节的转动方向,如下图所示,我们依次描叙了各个关节的正负方向。在关节坐标系下,机器人各个关节的转动方向,必须和下图相符。
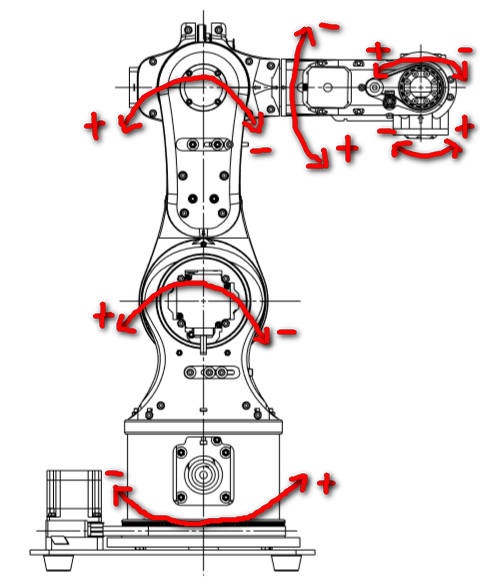
图 2
2. 机器人直角坐标系
目前所说的直角坐标系是机器人的工具坐标系,如下图所示,因为该机器人没有安装执行末端,所以,工具坐标系原点在第六轴末端法兰中心处,红色箭头是X轴,蓝色箭头是Z轴,根据右手定则确定Y轴方向。
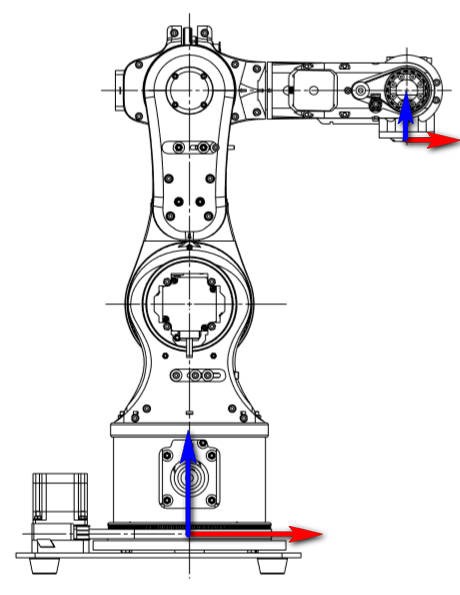
图3
基坐标系所在的位置是定义机器人基座的位置,如上图所示,坐标系原点在第一关节的中心处,红色箭头所示为X轴,蓝色箭头所示为Z轴,根据右手定则,即可确定Y轴的方向。具体如上图旁边那个坐标系所示。
当我们说六轴机械臂位姿时,说的是六轴机械臂末端的位姿,该位姿包括六个参数,分别为X YZ A B C。六轴机械臂末端的位姿是以基坐标系作为参考坐标系的。
X:笛卡尔坐标系的X轴,X轴距离
Y:笛卡尔坐标系的Y轴,Y轴距离
Z:笛卡尔坐标系的Z轴,Z轴距离
A:X-Y-Z固定角坐标系下的偏转角
B:X-Y-Z固定角坐标系下的俯仰角
C:X-Y-Z固定角坐标系下的回转角
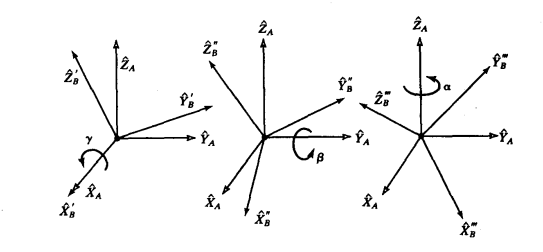
图 4
如上图所示,A对应第一个坐标系中的γ,B对应第二个坐标系中的β,C对应第三个坐标系中的α。
为什么我们需要花费专门的一节来讲解六轴机器人的坐标系和关节?因为我们后续要学习的FK和IK就是以这个为基础的。
FK是已知六轴机械臂在关节坐标系下各个关节转动的角度,然后求解直角坐标系下的XYZABC
IK是已知六轴机械臂在直角坐标系下的XYZABC,然后求解关节坐标系下各个关节转动的角度。

RobotAnno V6+
RobotAnno V6淘宝店二维码
购买RobotAnno V6+六轴机械臂(能够有比较大的优惠)
或者
需要交流六轴机械臂算法
或者
需要六轴机械臂资料或者代码:
联系方式:
QQ:2463778451
微信:
