机器人调试过程中通过手动方式JOG机器人是一个必不可少的工作,可是在JOG的时候机器人真的懂你吗?(或者说你真的懂机器人吗?)是否在很多种情况下你让机器人往东走,机器人却往西走,线性运动模式下还好说,反正只控制一个坐标方向,如果正方向不对,换负方向就好了。但是一到了重定位运动模式,很多小伙伴就不得不得乱试一通,由于不知道自己接下来机器人运动的结果是否是自己想要的,本来点快校好了,为了防止方向错误撞坏东西,而不得不把机器人摇离目标点,先通过重定位模式把TCP的姿态调试准确,再通过线性运动模式慢慢靠近目标点。如果姿态还有问题,就得再重复上述过程,其实这样是比较浪费时间的。其实有这种现象大多是因为小伙伴对机器人的不同坐标系组合的作用的结果没有真正了解所导致的。那么这一次,我们就一起来看一下不同坐标系在机器人运动中的作用原理,进而学会真正控制机器人,让机器人往北它就往北,重定位时让机器人往哪儿转它就往哪儿转。
首先来看一下在ABB机器人中我们可以使用的几种坐标系。在机器人的手动操纵界面中,我们可以看到机器人的坐标系种类一共有四种。分别是大地坐标、基座标、工具坐标、工件坐标。

基座标
基坐标系位于机器人基座底部,无须单独定义。每一个机器人的基座标方向都是统一的。如果你习惯直接使用基座标进行编程(当然这个习惯不是一个好习惯)的话,即使面对一个新的机器人,当新机器人的坐标系模式也为基座标时,就会发现一切的JOG操作时那么的熟悉。
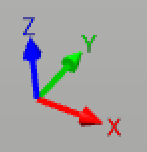
机器人基座标的定义规则如下图所示:

工件坐标系
工件坐标系的位置与现场应用中工件的实际位置有关,同一个工件采用不同的工件坐标系定义方法所得出的坐标系也可能不同。工件坐标系可以定义工件相对于大地坐标系(或其它坐标系)的位置。一个机器人可以定义多个工件坐标系,从而方便表示不同的工件,或者是同一工件在不同位置的若干副本。使用根据现场实际情况而建立的工件坐标系进行编程有很多优点。比如现有工件的工作表面与机器人基座标没有特定关系,那么想要沿着工件表面进行JOG操作,或者使用Offset如果使用基座标进行编程就会比较困难。而如果在进行编程操作前先根据该工件建立适用于该工件特点的工件坐标,那么后续的一些关于位置的一些操作就会变得简单许多。
工件座标的定义效果如下图所示:

A:大地坐标(或基座标)
B:工件坐标1
C:工件坐标2
大地坐标
大地坐标系可以定义多个机器人单元或者多个其它坐标系之间的位置关系。一般在多机器人或多外轴的机器人工作单元会用到。大地坐标系的位置默认与机器人的基座标位置重合。

如上图所示,两个机器人各有一个基座标,基座标A与基座标C方向是不同的,这样就会导致控制起来非常困难。但是如果同时使用大地坐标系B来进行控制,那么两个机器人的运动控制方式就是相同的了。
工具坐标
工具坐标系将工具中心点设为坐标系原点。工具坐标系可以定义工具的位置与方向。执行程序时,机器人就是将TCP移至编程位置。所以,如果更改了工具(或者工具坐标系),机器人的实际运动位置将随之更改。所有机器人在手腕处都有一个预定义工具坐标系(tool0),新工具坐标系的位置都是基于tool0偏移得到的。不同应用场景的工具坐标系定义要求可能会不同,比如常见的两种焊枪的工具坐标系的定义结果就不同,如下图所示:

四种坐标系的含义简单了解了,接下来我们接着看一下,在JOG过程中如何灵活正确选择上述的几种坐标系,并根据坐标系方向与我们想让机器人运行的方向判断示教器摇杆的使用方向。
首先了解几个概念:
我们自己所选择的坐标系模式在机器人重启后会自动重置为默认值;
线性运动的默认坐标系是基座标,当然我们可以在切换成别的坐标;
重定位运动默认的坐标系是使用工具坐标,当然我们可以在切换成别的坐标;
线性运动是使TCP沿着所选坐标系的坐标轴运动,TCP位置改变而姿态不变。X轴加TCP位置朝着X轴正向移动,X轴减TCP位置朝着X轴负方向移动。其它坐标系轴亦然。
重定位运动是使TCP绕着所选坐标系的坐标轴运动,TCP的位置不变而姿态改变。X轴加TCP朝着X轴正方向绕着X轴做顺时针旋转,X轴减TCP朝着X轴正方向绕着X轴做逆时针旋转。其它坐标系轴亦然;
下面来几个动图感受一下。要注意观察动图中的坐标系指向。无论是基座标、工件坐标、工具坐标都是红色代表X轴、绿色代表Y轴、紫色代表Z轴,箭头的方向(离开原点的方向)代表相应坐标系轴的正方向。
使用基座标线性运动
使用工具坐标线性运动
使用工具坐标重定位运动
使用基座标重定位运动

重定位运动不一定非得使用工具坐标,如果对于基座标或者工件坐标更熟悉使用后者进行重定位运动效率会更高些;同样线性运动运动也可以使用工具坐标。具体使用哪种坐标还是要根据自己的熟悉程度与现场实际工艺要求来选择。
好了,这次的分享就到这里了,如果本文对你有帮助或者启发,那就动动你可爱的小手点下在看或者转发到朋友圈吧,让它帮助启发更多的人。
文章首发自动化生产之家