大家好,我是飞鸽。上了研究生后听到师兄讲到李群、李代数,一脸的懵逼,他说“我面试搞无人机的如果不知道这个肯定不要”。于是乎,我在图书馆查询了相关书籍,可只有一些英文的书籍,借来一看更是懵逼。
随着研一的流转,渐渐的看到一些英文的无人机的控制文章里有些关于SO(3), SE(3),沿着文章的思路,以及在网上的资料寻找,渐渐对李群,李代数有了了解,这里将所学、所知略微总结下。
先来张整体的从CSDN截的图:
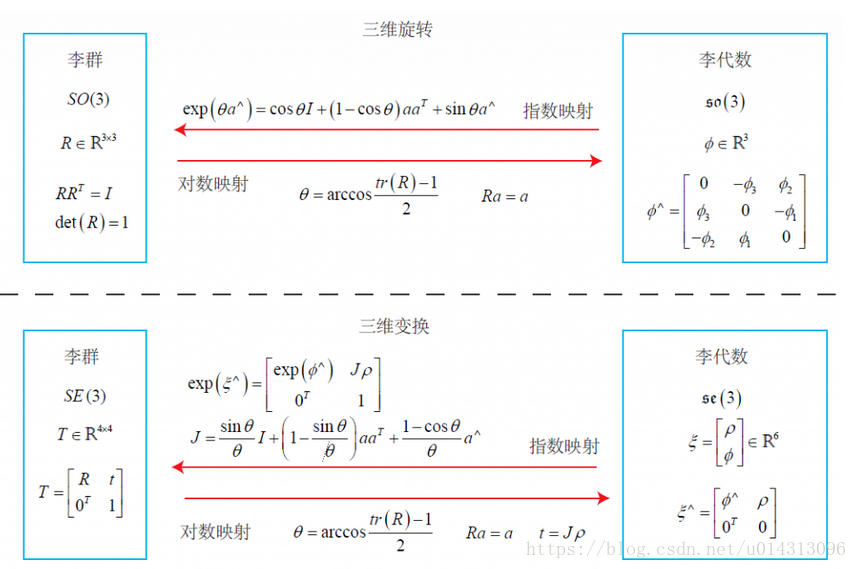
该图(网址https://blog.csdn.net/luohuiwu/article/details/80719146)展示了我所认知的李群、李代数抽象概念。这里,进一步解说下:SO(3)是旋转群,相当于刚体仅作空间转动的姿态几何;SE(3)是运动群,包括转动和平动两部分,上式中t代表位置(x,y,z)一般用p来表示。
关于指数映射的推导,该链接中有讲解:https://blog.csdn.net/wangjie86821/article/details/79665368
群,是一种集合加上一种运算的代数结构,主要满足有:封闭性、结合律、幺元、逆等性质。而李群,则是指具有连续光滑性质的群。
李代数相当于李群的导数,即角速度(速度)与角度(位置)的关系,代表了一旋转向量与矩阵的对应关系。其中方向余弦矩阵属于SO(3)。李群与李代数之间的转换存在指数与对数的映射关系,具体为何如此映射,以及是否有角度限制的条件(是否只满足小角度或是<180度之类的条件)目前还没有找到答案。其中指数映射和惯性导航中的罗德里格斯公式相似。
其中,中文书籍中有提到相关知识的有《复杂曲面数字化制造的几何学理论和方法》和《视觉SLAM十四讲》中的相关章节。
使用李代数的一大动机是用来进行优化,因为在从空间点到观测数据的转换时,总会有噪音的存在,优化机器人的位姿使得噪声最小 。相关讲解网址:https://blog.csdn.net/hansry/article/details/74905673
方向余弦矩阵(SO(3))相比与欧拉角有很多优点 ,欧拉角具有旋转顺序,即称z-y-x欧拉角,且非正交。而方向余弦矩阵也是由三次旋转代表的矩阵相乘得到,同样不同矩阵相乘顺序得到不同的方向余弦矩阵,但使用SO(3)的姿态控制可以使旋转路径更加光滑,路径更高效优化,这其中有些抽象的几何原理有待用时间去领会。
关于该理论讲解的不错的网址:https://blog.csdn.net/ipatient/article/details/50555366
文章出处,请关注微信公众号:欣飞鸽(寓意:开心飞翔,灵动如鸽!),共同学习无人机技术开发~