这篇文章,是分布式学习记录笔记,主要由3位作者的文章组成,
首先感谢他们,
以下记录是来自于http://m.it168.com/detailText.html?id=5001279,我看到比较好,就转记录到自己的博客了,如果有侵权,立马删掉
文章一:Tensorflow分布式原理理解
实现原理
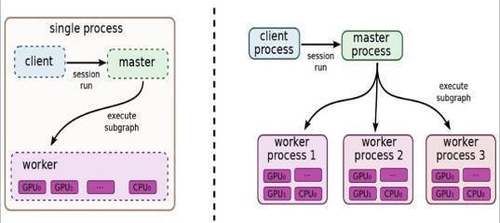
图1.1 TensorFlow单机版本和分布式版本的示例图
TensorFlow计算图的运行机制
客户
客户端基于TensorFlow的编程接口,构造计算图。此时,TensorFlow并未执行任何计算。直至建立会议会话,并以会议为桥梁,建立客户端与后端运行时的通道,将的的Protobuf格式的GraphDef发送至分布式Master。也就是说,当客户对OP结果进行求值时,将触发Distributed Master的计算图的执行过程。如下图所示,Client构建了一个简单计算图。它首先将w与x进行矩阵相乘,再与截距b按位相加,最后更新至第
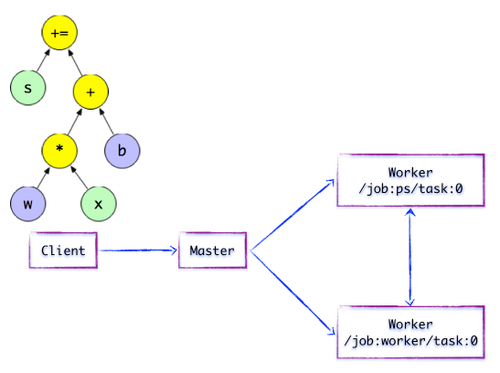
图1.2简单的TensorFlow计算图分布式主
在分布式的运行时环境中,分布式主根据Session.run的撷取参数,从计算图中反向遍历,找到所依赖的最小子图。然后分布式主负责将该子图再次分裂为多个「子图片段“,以便在不同的进程和设备上运行这些”子图片段“。最后,分布式大师将这些图片段派发给工作服务。随后工作服务启动「本地子图」的执行过程.Distributed Master将会缓存「子图片段」,以便后续执行过程重复使用这些「子图片段」,避免重复计算。
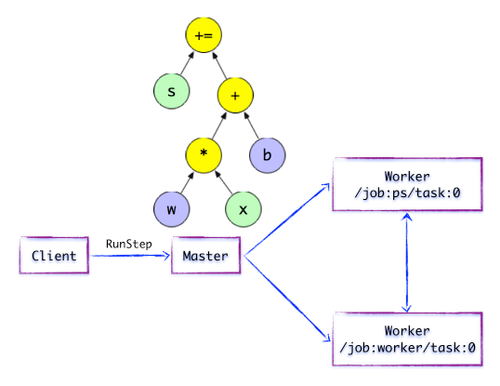
图1.3简单的TensorFlow计算图---开始执行执行图计算
如上图所示,分布式主开始执行计算子图。在执行之前,分布式主实施一系列优化技术,例如“公共表达式消除”,“常量折叠”等。随后,分布式主负责任务集的协同,执行优化后的计算子图。
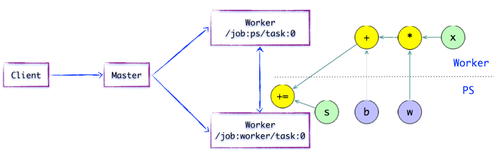
图1.4简单的TensorFlow计算图 - 图片子段子图片段
如上图所示,存在一种合理的“子图片段”划分算法.Distributed Master将模型参数相关的OP进行分组,并放置在PS任务上。其他OP则划分为另外一组,放置在工任务上执行。
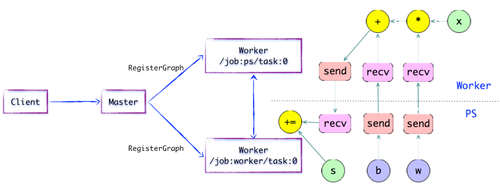
图1.5简单的TensorFlow计算图---插入SEND / RECV节点如上图所示,如果计算图的边被任务节点分割,Distributed Master将负责将该边进行分裂,在两个分布式任务之间插入SEND和RECV节点,实现数据的传递。
随后,分布式大师将“子图片段”派发给相应的任务中执行,在工人服务成为“本地子图”,它负责执行该子图的上的OP。
工人服务
对于每个任务,都将存在相应的工人服务,它主要负责如下3个方面的职责:
处理来自主的请求;
调度OP的内核实现,执行本地子图;
协同任务之间的数据通信。
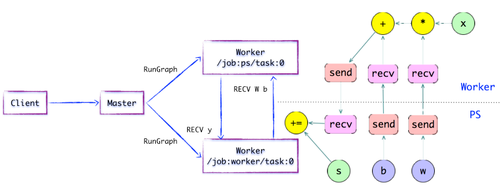
图1.6简单的TensorFlow计算图---执行本地子图
执行本地子图工人服务派发OP到本地设备,执行Kernel的特定。它将尽最大可能地利用多CPU / GPU的处理能力,并发地执行Kernel实现。
另外,TensorFlow根据设备类型,对于设备间的SEND / RECV节点进行特化实现:
使用cudaMemcpyAsync的API实现本地CPU与GPU设备的数据传输;
对于本地的GPU之间则使用端到端的DMA,避免了跨主机CPU昂贵的拷贝过程。
对于任务之间的数据传递,TensorFlow支持多协议,主要包括:
gRPC over TCP
RDMA over Converged Ethernet
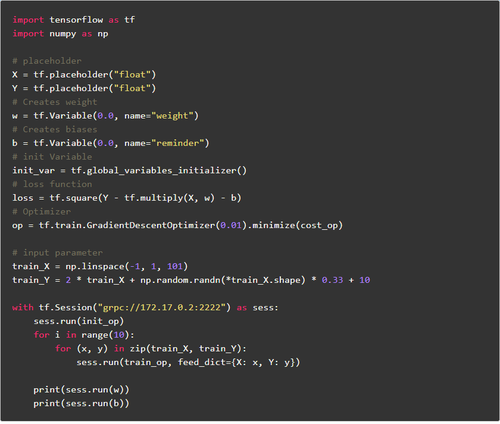
示例代码
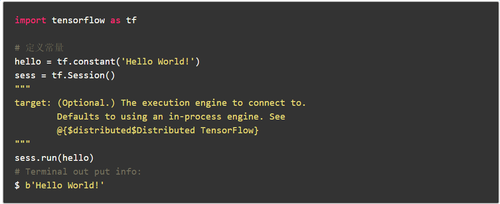
以上简短的代码其实就已经运用到了Tensorflow分布式结构,只不过该分布式的客户端,主,工人都是在本地的同一台机器而已。而多台机器实现分布式只需要指定相应的客户端,主,工人分布在不同的机器上就可以实现了,下面将详细介绍如何在多台机器上实现Tensorflow分布式。
3. Tensorflow分布式之图形复制(图内拷贝)
GRPC
上面提到了Tensorflow的单机模式是将客户端,主,工人都放在同一台机器上,而分布式模式就是将三者分布到多台机器上。这时就需要考虑多台机器之前的通信问题了,在Tensorflow的分布式中常使用的通信协议是GRPC协议,GRPC是谷歌开发的一个开源的RPC(远程过程调用)协议。该协议允许运行于一台计算机的程序调用另一台计算机的子程序,而程序员无需额外地为这个交互作用编程。
图形内复制
Tensorflow训练模型通常需要一些训练参数,训练参数的分发有两种方式:图形内复制,图形间复制其中图形内复制方式的数据分发是在一个节点上,这样的好处是配置简单,其他多机多GPU的计算节点,只要起个连接操作,暴露一个网络接口,等在那里接受任务就好了。但是这样的坏处是训练数据的分发在一个节点上,要把训练数据分发到不同的机器上,严重影响并发训练速度。在大数据训练的情况下,不推荐使用这种模式。
示例代码1自动节点分配策略----简单的贪婪策略代价模型估计
worker_01
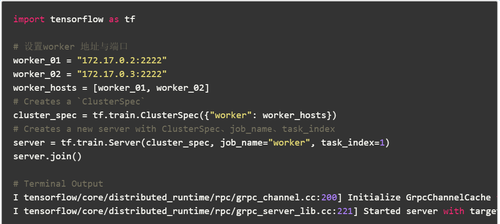
worker_02
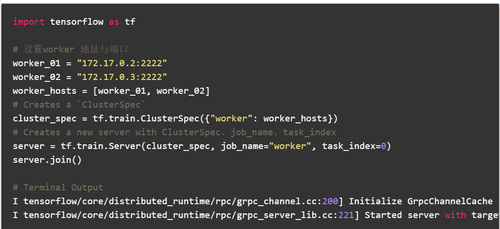
客户
从上面的示例代码中我们可以看出:这里使用了三台机器在训练,一个克林特,两个工人这里可能会有一些问题:问题1.主在哪里问题2.每一个节点的任务怎么分配?对于问题1,在图中复制方式中主其实就是与tf.Session(“grpc://172.17.0.2:2222”)as sess:这句话中指定的目标,也就是说172.17.0.2 :2222这台机器就是主,在运行的时候会在这台机器上打印如下日志:I tensorflow / core / distributed_runtime / master_session.cc:1012]启动主会话254ffd62801d1bee with config:对于问题2,
把计算已经从单机多GPU,已经扩展到了多机多GPU了,这些计算节点暴露出来的网络接口,使用起来就跟本机的一个GPU的使用一样,只要在操作的时候指定tf.device(“ / job:worker / task:n“),就可以向指定GPU一样,把操作指定到一个计算节点上计算,使用起来和多GPU的类似。
示例代码2用户限制的节点分配策略
3. Tensorflow分布式之间图复制(图间拷贝)
下间图形模式,训练的参数保存在参数服务器,数据不用分发,数据分片的保存在各个计算节点,各个计算节点自己算自己的,算完了之后,把要更新的参数告诉参数服务器,参数服务器更新参数。这种模式的优点是不用训练数据的分发了,尤其是在数据量在TB级的时候,节省了大量的时间,所以大数据深度学习还是推荐使用图形间模式。
文章二:Tensorflow分布式原理,部署,实例
以下记录是来自于https://blog.csdn.net/CodeMaster_/article/details/76223835,我看到比较好,就转记录到自己的博客了,如果有侵权,立马删掉
TF的实现分为了单机实现和分布式实现,在分布式实现中,需要实现的是对client,master,worker process不在同一台机器上时的支持。数据量很大的情况下,单机跑深度学习程序,过于耗时,所以需要TensorFlow分布式并行。
该实例是TF的经典入门实例手写字体识别MNIST基于分布式的实现,代码都加了中文注释,更加通俗易懂。
GitHub实例地址:https://github.com/TracyMcgrady6/Distribute_MNIST
欢迎大家star!

Single-Device Execution
构建好图后,使用拓扑算法来决定执行哪一个节点,即对每个节点使用一个计数,值表示所依赖的未完成的节点数目,当一个节点的运算完成时,将依赖该节点的所有节点的计数减一。如果节点的计数为0,将其放入准备队列待执行。
单机多GPU训练
先简单介绍下单机的多GPU训练,然后再介绍分布式的多机多GPU训练。
单机的多GPU训练, tensorflow的官方已经给了一个cifar的例子,已经有比较详细的代码和文档介绍, 这里大致说下多GPU的过程,以便方便引入到多机多GPU的介绍。
单机多GPU的训练过程:
-
假设你的机器上有3个GPU;
-
在单机单GPU的训练中,数据是一个batch一个batch的训练。 在单机多GPU中,数据一次处理3个batch(假设是3个GPU训练), 每个GPU处理一个batch的数据计算。
-
变量,或者说参数,保存在CPU上
-
刚开始的时候数据由CPU分发给3个GPU, 在GPU上完成了计算,得到每个batch要更新的梯度。
-
然后在CPU上收集完了3个GPU上的要更新的梯度, 计算一下平均梯度,然后更新参数。
-
然后继续循环这个过程。
通过这个过程,处理的速度取决于最慢的那个GPU的速度。如果3个GPU的处理速度差不多的话, 处理速度就相当于单机单GPU的速度的3倍减去数据在CPU和GPU之间传输的开销,实际的效率提升看CPU和GPU之间数据的速度和处理数据的大小。
通俗解释
写到这里觉得自己写的还是不同通俗易懂, 下面就打一个更加通俗的比方来解释一下:
老师给小明和小华布置了10000张纸的乘法题并且把所有的乘法的结果加起来, 每张纸上有128道乘法题。 这里一张纸就是一个batch, batch_size就是128. 小明算加法比较快, 小华算乘法比较快,于是小华就负责计算乘法, 小明负责把小华的乘法结果加起来 。 这样小明就是CPU,小华就是GPU.
这样计算的话, 预计小明和小华两个人得要花费一个星期的时间才能完成老师布置的题目。 于是小明就招来2个算乘法也很快的小红和小亮。 于是每次小明就给小华,小红,小亮各分发一张纸,让他们算乘法, 他们三个人算完了之后, 把结果告诉小明, 小明把他们的结果加起来,然后再给他们没人分发一张算乘法的纸,依次循环,知道所有的算完。
这里小明采用的是同步模式,就是每次要等他们三个都算完了之后, 再统一算加法,算完了加法之后,再给他们三个分发纸张。这样速度就取决于他们三个中算乘法算的最慢的那个人, 和分发纸张的速度。
Multi-Device Execution
当系统到了分布式情况下时,事情就变得复杂了很多,还好前述调度用了现有的框架。那么对于TF来说,剩下的事情就是:
决定运算在哪个设备上运行
管理设备之间的数据传递
分布式多机多GPU训练
随着设计的模型越来越复杂,模型参数越来越多,越来越大, 大到什么程度?多到什么程度? 多参数的个数上百亿个, 训练的数据多到按TB级别来衡量。大家知道每次计算一轮,都要计算梯度,更新参数。 当参数的量级上升到百亿量级甚至更大之后, 参数的更新的性能都是问题。 如果是单机16个GPU, 一个step最多也是处理16个batch, 这对于上TB级别的数据来说,不知道要训练到什么时候。于是就有了分布式的深度学习训练方法,或者说框架。
参数服务器
在介绍tensorflow的分布式训练之前,先说下参数服务器的概念。
前面说道, 当你的模型越来越大, 模型的参数越来越多,多到模型参数的更新,一台机器的性能都不够的时候, 很自然的我们就会想到把参数分开放到不同的机器去存储和更新。
因为碰到上面提到的那些问题, 所有参数服务器就被单独拧出来, 于是就有了参数服务器的概念。 参数服务器可以是多台机器组成的集群, 这个就有点类似分布式的存储架构了, 涉及到数据的同步,一致性等等, 一般是key-value的形式,可以理解为一个分布式的key-value内存数据库,然后再加上一些参数更新的操作。 详细的细节可以去google一下, 这里就不详细说了。 反正就是当性能不够的时候,
几百亿的参数分散到不同的机器上去保存和更新,解决参数存储和更新的性能问题。
借用上面的小明算题的例子,小明觉得自己算加法都算不过来了, 于是就叫了10个小明过来一起帮忙算。
gRPC (google remote procedure call)
TensorFlow分布式并行基于gRPC通信框架,其中包括一个master创建Session,还有多个worker负责执行计算图中的任务。
gRPC首先是一个RPC,即远程过程调用,通俗的解释是:假设你在本机上执行一段代码num=add(a,b),它调用了一个过程 call,然后返回了一个值num,你感觉这段代码只是在本机上执行的, 但实际情况是,本机上的add方法是将参数打包发送给服务器,然后服务器运行服务器端的add方法,返回的结果再将数据打包返回给客户端.
结构
Cluster是Job的集合,Job是Task的集合。
即:一个Cluster可以切分多个Job,一个Job指一类特定的任务,每个Job包含多个Task,比如parameter server(ps)、worker,在大多数情况下,一个机器上只运行一个Task.
在分布式深度学习框架中,我们一般把Job划分为Parameter Server和Worker:
- Parameter Job是管理参数的存储和更新工作.
- Worker Job是来运行ops.
如果参数的数量太大,一台机器处理不了,这就要需要多个Tasks.
TF分布式模式
In-graph 模式
将模型的计算图的不同部分放在不同的机器上执行
In-graph模式和单机多GPU模型有点类似。 还是一个小明算加法, 但是算乘法的就可以不止是他们一个教室的小华,小红,小亮了。 可以是其他教师的小张,小李。。。。
In-graph模式, 把计算已经从单机多GPU,已经扩展到了多机多GPU了, 不过数据分发还是在一个节点。 这样的好处是配置简单, 其他多机多GPU的计算节点,只要起个join操作, 暴露一个网络接口,等在那里接受任务就好了。 这些计算节点暴露出来的网络接口,使用起来就跟本机的一个GPU的使用一样, 只要在操作的时候指定tf.device(“/job:worker/task:n”),
就可以向指定GPU一样,把操作指定到一个计算节点上计算,使用起来和多GPU的类似。 但是这样的坏处是训练数据的分发依然在一个节点上, 要把训练数据分发到不同的机器上, 严重影响并发训练速度。在大数据训练的情况下, 不推荐使用这种模式。
Between-graph 模式
数据并行,每台机器使用完全相同的计算图
Between-graph模式下,训练的参数保存在参数服务器, 数据不用分发, 数据分片的保存在各个计算节点, 各个计算节点自己算自己的, 算完了之后, 把要更新的参数告诉参数服务器,参数服务器更新参数。这种模式的优点是不用训练数据的分发了, 尤其是在数据量在TB级的时候, 节省了大量的时间,所以大数据深度学习还是推荐使用Between-graph模式。
同步更新和异步更新
in-graph模式和between-graph模式都支持同步和异步更新。
在同步更新的时候, 每次梯度更新,要等所有分发出去的数据计算完成后,返回回来结果之后,把梯度累加算了均值之后,再更新参数。 这样的好处是loss的下降比较稳定, 但是这个的坏处也很明显, 处理的速度取决于最慢的那个分片计算的时间。
在异步更新的时候, 所有的计算节点,各自算自己的, 更新参数也是自己更新自己计算的结果, 这样的优点就是计算速度快, 计算资源能得到充分利用,但是缺点是loss的下降不稳定, 抖动大。
在数据量小的情况下, 各个节点的计算能力比较均衡的情况下, 推荐使用同步模式;数据量很大,各个机器的计算性能掺差不齐的情况下,推荐使用异步的方式。
实例
tensorflow官方有个分布式tensorflow的文档,但是例子没有完整的代码, 这里写了一个最简单的可以跑起来的例子,供大家参考,这里也傻瓜式给大家解释一下代码,以便更加通俗的理解。
该例子是TF的入门实例手写字体识别MNIST基于分布式的实现,代码都加了中文注释,更加通俗易懂。
执行命令示例
ps 节点执行:
python distributed.py --job_name=ps --task_index=0worker1 节点执行:
python distributed.py --job_name=worker --task_index=0worker2 节点执行:
python distributed.py --job_name=worker --task_index=1运行结果
worker0节点运行结果

worker1节点运行结果

实验代码
# encoding:utf-8
import math
import tempfile
import time
import tensorflow as tf
from tensorflow.examples.tutorials.mnist import input_data
flags = tf.app.flags
IMAGE_PIXELS = 28
# 定义默认训练参数和数据路径
flags.DEFINE_string('data_dir', '/tmp/mnist-data', 'Directory for storing mnist data')
flags.DEFINE_integer('hidden_units', 100, 'Number of units in the hidden layer of the NN')
flags.DEFINE_integer('train_steps', 10000, 'Number of training steps to perform')
flags.DEFINE_integer('batch_size', 100, 'Training batch size ')
flags.DEFINE_float('learning_rate', 0.01, 'Learning rate')
# 定义分布式参数
# 参数服务器parameter server节点
flags.DEFINE_string('ps_hosts', '192.168.32.145:22221', 'Comma-separated list of hostname:port pairs')
# 两个worker节点
flags.DEFINE_string('worker_hosts', '192.168.32.146:22221,192.168.32.160:22221',
'Comma-separated list of hostname:port pairs')
# 设置job name参数
flags.DEFINE_string('job_name', None, 'job name: worker or ps')
# 设置任务的索引
flags.DEFINE_integer('task_index', None, 'Index of task within the job')
# 选择异步并行,同步并行
flags.DEFINE_integer("issync", None, "是否采用分布式的同步模式,1表示同步模式,0表示异步模式")
FLAGS = flags.FLAGS
def main(unused_argv):
mnist = input_data.read_data_sets(FLAGS.data_dir, one_hot=True)
if FLAGS.job_name is None or FLAGS.job_name == '':
raise ValueError('Must specify an explicit job_name !')
else:
print 'job_name : %s' % FLAGS.job_name
if FLAGS.task_index is None or FLAGS.task_index == '':
raise ValueError('Must specify an explicit task_index!')
else:
print 'task_index : %d' % FLAGS.task_index
ps_spec = FLAGS.ps_hosts.split(',')
worker_spec = FLAGS.worker_hosts.split(',')
# 创建集群
num_worker = len(worker_spec)
cluster = tf.train.ClusterSpec({'ps': ps_spec, 'worker': worker_spec})
server = tf.train.Server(cluster, job_name=FLAGS.job_name, task_index=FLAGS.task_index)
if FLAGS.job_name == 'ps':
server.join()
is_chief = (FLAGS.task_index == 0)
# worker_device = '/job:worker/task%d/cpu:0' % FLAGS.task_index
with tf.device(tf.train.replica_device_setter(
cluster=cluster
)):
global_step = tf.Variable(0, name='global_step', trainable=False) # 创建纪录全局训练步数变量
hid_w = tf.Variable(tf.truncated_normal([IMAGE_PIXELS * IMAGE_PIXELS, FLAGS.hidden_units],
stddev=1.0 / IMAGE_PIXELS), name='hid_w')
hid_b = tf.Variable(tf.zeros([FLAGS.hidden_units]), name='hid_b')
sm_w = tf.Variable(tf.truncated_normal([FLAGS.hidden_units, 10],
stddev=1.0 / math.sqrt(FLAGS.hidden_units)), name='sm_w')
sm_b = tf.Variable(tf.zeros([10]), name='sm_b')
x = tf.placeholder(tf.float32, [None, IMAGE_PIXELS * IMAGE_PIXELS])
y_ = tf.placeholder(tf.float32, [None, 10])
hid_lin = tf.nn.xw_plus_b(x, hid_w, hid_b)
hid = tf.nn.relu(hid_lin)
y = tf.nn.softmax(tf.nn.xw_plus_b(hid, sm_w, sm_b))
cross_entropy = -tf.reduce_sum(y_ * tf.log(tf.clip_by_value(y, 1e-10, 1.0)))
opt = tf.train.AdamOptimizer(FLAGS.learning_rate)
train_step = opt.minimize(cross_entropy, global_step=global_step)
# 生成本地的参数初始化操作init_op
init_op = tf.global_variables_initializer()
train_dir = tempfile.mkdtemp()
sv = tf.train.Supervisor(is_chief=is_chief, logdir=train_dir, init_op=init_op, recovery_wait_secs=1,
global_step=global_step)
if is_chief:
print 'Worker %d: Initailizing session...' % FLAGS.task_index
else:
print 'Worker %d: Waiting for session to be initaialized...' % FLAGS.task_index
sess = sv.prepare_or_wait_for_session(server.target)
print 'Worker %d: Session initialization complete.' % FLAGS.task_index
time_begin = time.time()
print 'Traing begins @ %f' % time_begin
local_step = 0
while True:
batch_xs, batch_ys = mnist.train.next_batch(FLAGS.batch_size)
train_feed = {x: batch_xs, y_: batch_ys}
_, step = sess.run([train_step, global_step], feed_dict=train_feed)
local_step += 1
now = time.time()
print '%f: Worker %d: traing step %d dome (global step:%d)' % (now, FLAGS.task_index, local_step, step)
if step >= FLAGS.train_steps:
break
time_end = time.time()
print 'Training ends @ %f' % time_end
train_time = time_end - time_begin
print 'Training elapsed time:%f s' % train_time
val_feed = {x: mnist.validation.images, y_: mnist.validation.labels}
val_xent = sess.run(cross_entropy, feed_dict=val_feed)
print 'After %d training step(s), validation cross entropy = %g' % (FLAGS.train_steps, val_xent)
sess.close()
if __name__ == '__main__':
tf.app.run()
参考:
http://blog.csdn.net/luodongri/article/details/52596780
http://blog.csdn.net/u012436149/article/details/53140869
http://blog.csdn.net/stdcoutzyx/article/details/51645396
TensorFlow实战[黄文坚 唐源 著]
文章三:分布式tensorflow 搭建
以下记录是来自于http://www.hongweipeng.com/index.php/archives/1514/,我看到比较好,就转记录到自己的博客了,如果有侵权,立马删掉
工业中面临的常常是庞大的数据计算量,采用单一的tensorflow不能完全解决问题,需要结合hadoop,kafka,GPU,C++ 来进行加速和搭建系统。官方的whl安装包不能满足系统要求,通过源码编译安装来加快运行速度。
在此前请先搭建hadoop环境,安装bazel,我的环境 Ubuntu18.04,python3,hadoop2.7
一. 编译本地tensorflow安装包
1.clone tensorflow源代码到本地
2.进入 tensorflow目录下目录下 执行 ./configure
3.

需要注意的几点是:指定python3目录,开启jemalloc,hadoop,kafka接口支持(jemalloc用于管理内存分配,如果安装了cuda和MKL加速需要指定目录)
4.运行
bazel build -c opt //tensorflow/tools/pip_package:build_pip_package编译耗时:至少60分钟
5.指定位置生成安装包并安装
bazel-bin/tensorflow/tools/pip_package/build_pip_package /tmp/tensorflow_pkg
pip install /tmp/tensorflow_pkg/tensorflow-1.8.0-cp36-cp36m-linux_x86_64.whl6.分发安装包到其它机器并安装
7.程序使用多块显卡
c = []
for d in ['/device:GPU:2', '/device:GPU:3']:
with tf.device(d):
a = tf.constant([1.0, 2.0, 3.0, 4.0, 5.0, 6.0], shape=[2, 3])
b = tf.constant([1.0, 2.0, 3.0, 4.0, 5.0, 6.0], shape=[3, 2])
c.append(tf.matmul(a, b))
with tf.device('/cpu:0'):
sum = tf.add_n(c)
# 创建一个 session ,并将 log_device_placement 设置为 True。
sess = tf.Session(config=tf.ConfigProto(log_device_placement=True))
# 执行这个操作。
print(sess.run(sum))8.运行分布式tensorflow程序
import argparse
import sys
import tensorflow as tf
FLAGS = None
def main(_):
ps_hosts = FLAGS.ps_hosts.split(",")
worker_hosts = FLAGS.worker_hosts.split(",")
# 从参数服务器和工作主机创建一个集群
cluster = tf.train.ClusterSpec({"ps": ps_hosts, "worker": worker_hosts})
# 创建并启动本地任务的服务器
server = tf.train.Server(cluster,
job_name=FLAGS.job_name,
task_index=FLAGS.task_index)
if FLAGS.job_name == "ps":
server.join()
elif FLAGS.job_name == "worker":
# 默认情况下将操作分配给本地Worker
with tf.device(tf.train.replica_device_setter(
worker_device="/job:worker/task:%d" % FLAGS.task_index,
cluster=cluster)):
# 建立模型...
loss = ...
global_step = tf.contrib.framework.get_or_create_global_step()
train_op = tf.train.AdagradOptimizer(0.01).minimize(
loss, global_step=global_step)
# StopAtStepHook 在运行给定步骤后处理停止
hooks=[tf.train.StopAtStepHook(last_step=1000000)]
# MonitoredTrainingSession 负责会话初始化
# 从检查点恢复,保存到检查点,一旦完成或报错就关闭
with tf.train.MonitoredTrainingSession(master=server.target,
is_chief=(FLAGS.task_index == 0),
checkpoint_dir="/tmp/train_logs",
hooks=hooks) as mon_sess:
while not mon_sess.should_stop():
# 异步运行训练
# mon_sess.run 在被抢占 PS 的情况下处理 AbortedError
mon_sess.run(train_op)
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.register("type", "bool", lambda v: v.lower() == "true")
# 用于定义 tf.train.ClusterSpec 的标志
parser.add_argument(
"--ps_hosts",
type=str,
default="",
help="Comma-separated list of hostname:port pairs"
)
parser.add_argument(
"--worker_hosts",
type=str,
default="",
help="Comma-separated list of hostname:port pairs"
)
parser.add_argument(
"--job_name",
type=str,
default="",
help="One of 'ps', 'worker'"
)
# Flags for defining the tf.train.Server
parser.add_argument(
"--task_index",
type=int,
default=0,
help="Index of task within the job"
)
FLAGS, unparsed = parser.parse_known_args()
tf.app.run(main=main, argv=[sys.argv[0]] + unparsed)在脚本中启动多个训练:
python trainer.py \
--ps_hosts=ps0.xxx.com:2222,ps1.xxx.com:2222 \
--worker_hosts=worker0.xxx.com:2222,worker1.xxx.com:2222 \
--job_name=ps --task_index=0如果在hadoop上运行,数据改为读写HDFS文件路径
filename_queue = tf.train.string_input_producer([
"hdfs://namenode:8020/path/to/file1.csv",
"hdfs://namenode:8020/path/to/file2.csv",
])