我的新博客:http://ryuzhihao.cc/
已经快一个月没有写新文章了。其实这段时间我写了很多小程序,但是一直在忙保研的事情就没有时间写文章。一次无尽的9月(at涼宮ハルヒ)。现在终于一切事情都结束了,重新开始填坑。
最近出于一些其他的用途,整理并实现了Alpha shapes,所以拿出来分享一下。首先,这篇博客以及我的程序,是根据Francois Belair写的文章而完成的,原文链接:Alpha Shape Applet。
这里贴一下在下面提供的一个测试程序的下载链接:
http://download.csdn.net/download/mahabharata_/10001135
一、什么是Alpha Shapes?
Alpha Shapes是从离散的空间点集(point sets)中抽象出其直观形状的一种方法,简言之,从一堆无序的点中获取大致的轮廓。
首先,还是先贴出我的实现结果。
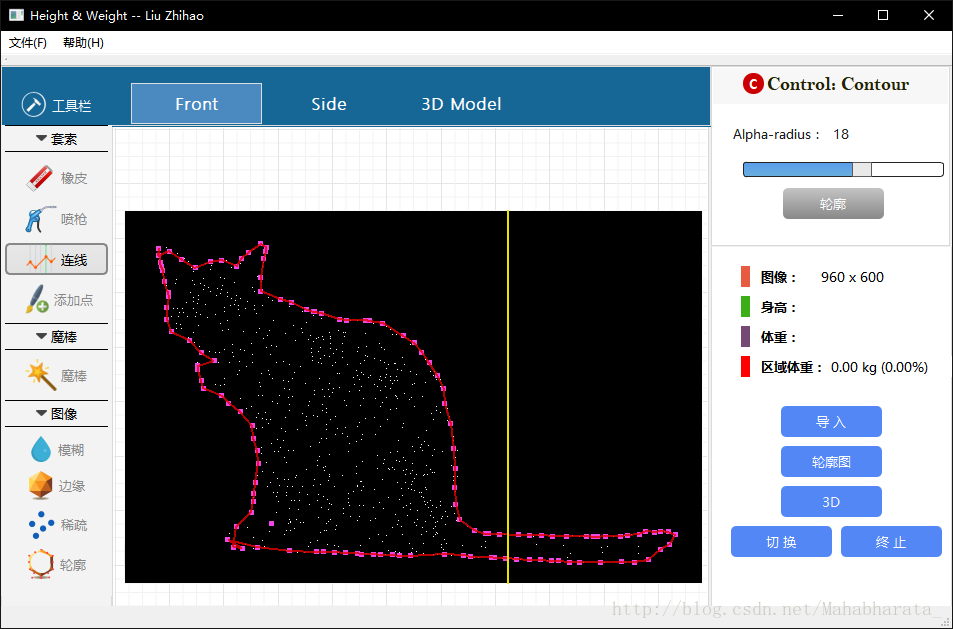
(1)我的某个使用Alpha Shapes形状检测的程序:

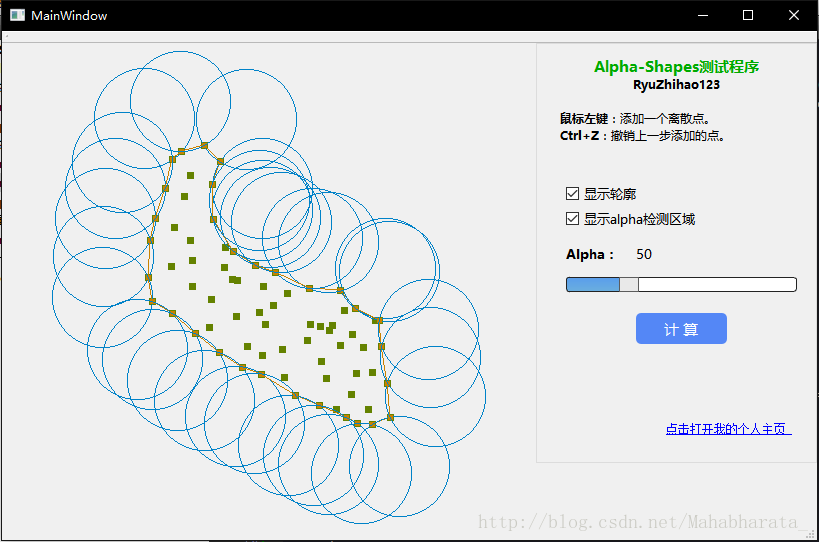
(二)专门为Alpha Shapes 设计的一个测试程序
下图程序的下载链接在文章开头已经给出。
二、Alpha Shapes算法流程
(一)单阈值Alpha Shapes算法的轮廓提取
这是最简单的一种Alpha Shapes的实现。在一个有限离散点集S中,有n个点构成,这n个点可以组成n*(n-1)条线段,我们可以通过如下的方法判断哪条线段是在边界线上的线段:在点集S内,过任意两点P1、P2绘制半径为alpha的圆(显然,在给定半径时,过确定的两点的圆应该有两个),如果这个圆内没有其他点,则认为点P1、P2是边界点,其连线P1P2即为边界线段。
如果粗暴的去求解,其时间复杂度为O(n^3)。但由于对称性,这种方法的复杂度可降低至O(n^2*log2n)。当然中间还可以通过一些其他的约束条件去减少计算次数,具体的计算流程如下:
第1步:遍历每条边P1-P2。
第2步:如果边P1-P2的长度大于直径2*Alpha,则跳过(因为无法找到过这两个点的圆)。
第3步:根据简单的几何知识,求出两个圆的圆心C1、C2。
(3.1) 边P1-P2的方向向量v1 =p1-p2,且设v1为(x,y),同时边p1p2的中点坐标mid=0.5*(p1+p2)。
(3.2) 我们可以根据向量垂直时点积为0的性质,求出边P1-P2的垂直向量v2(设v2坐标为(a,b),则ax+by=0)。
(3.3) 设边P1-P2的长度为len,求出圆心到边P1-P2的距离dist = sqrt( alpha^2 - 0.25*len^2);
(3.4) 圆心C1 =mid+dist*v2;圆心C2 =mid-dist*v2;
第4步:两个圆中有一个圆内部不包含点集S中的其他任何点,则边P1-P2即为边界。
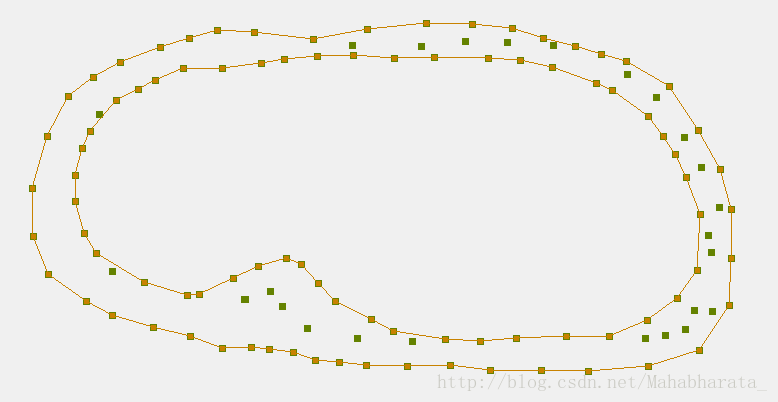
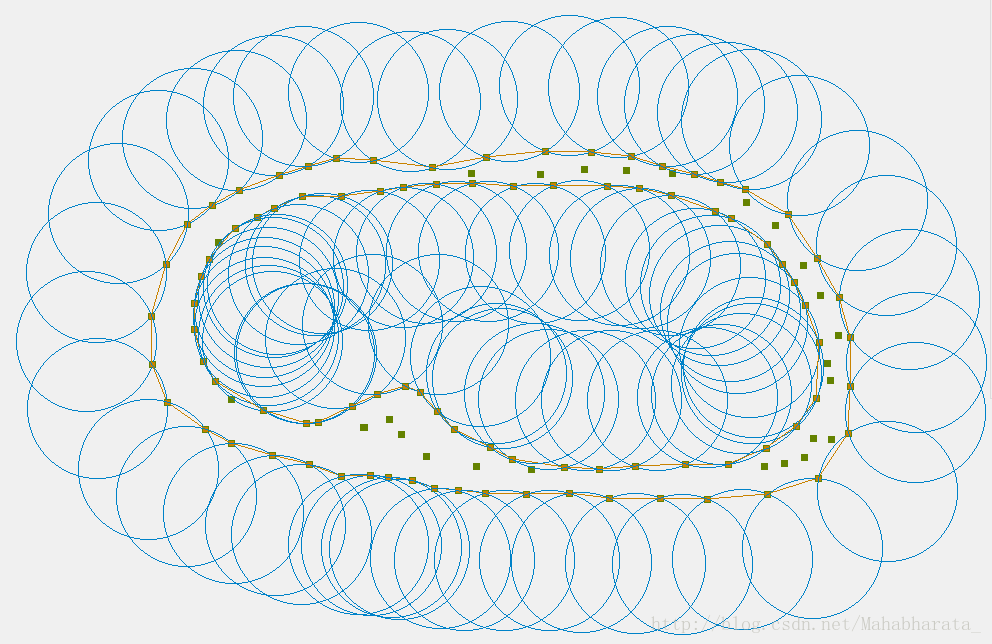
实现结果如下图:分别是轮廓的检测结果、Alpha检测圆:
求解alpha shapes轮廓的代码如下:
struct Edge
{
vec2 a;
vec2 b;
}
vector<vec2> m_points; // 点集S
vector<Edge> m_edges; // 边
void PointSet::AlphaShapes()
{
m_edges.clear();
for(int i=0; i<m_points.size(); i++)
{
// k从i+1开始,减少重复计算
for(int k=i+1; k<m_points.size(); k++)
{
// 跳过距离大于直径的情况
if(m_points[i].distanceToPoint(m_points[k])>2*m_radius)
continue;
// 两个圆心
QVector2D c1,c2;
// 线段中点
QVector2D center = 0.5*(m_points[i]+m_points[k]);
// 方向向量 d = (x,y)
QVector2D dir = m_points[i] - m_points[k];
// 垂直向量 n = (a,b) a*dir.x+b*dir.y = 0; a = -(b*dir.y/dir.x)
QVector2D normal;
normal.setY(5); // 因为未知数有两个,随便给y附一个值5。
if(dir.x() != 0)
normal.setX(-(normal.y()*dir.y())/dir.x());
else // 如果方向平行于y轴
{
normal.setX(1);
normal.setY(0);
}
normal.normalize(); // 法向量单位化
float len = sqrt(m_radius*m_radius-(0.25*dir.length()*dir.length()));
c1 = center + len*normal;
c2 = center - len*normal;
// b1、b2记录是否在圆C1、C2中找到其他点。
bool b1 = false, b2 = false;
for(int m=0; m<m_points.size(); m++)
{
if( m == i || m == k)
continue;
if(b1!=true && m_points[m].distanceToPoint(c1) < m_radius)
b1 = true;
if(b2!=true && m_points[m].distanceToPoint(c2) < m_radius)
b2 = true;
// 如果都有内部点,不必再继续检查了
if(b1 == true && b2 == true)
break;
}
Edge edge;
if(b1!=true || b2!=true)
{
edge.a = m_points[i];
edge.b = m_points[k];
m_edges.push_back(edge);
}
}
}
}
(二)改进的单阈值Alpha Shapes轮廓提取:
为了减少计算量。我们可以先采取先建立三角网,再从三角网的外边界开始判断,其流程如下:
第1步:根据点集S建立Delaunay三角网。
第2步:若三角形中某条边的长度大于2*alpha,则删除该三角形(不符合条件)。
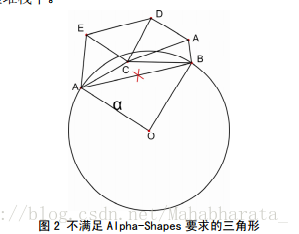
第3步:对三角形的每条边进行判断:若过某条边的两点且半径为alpha的圆包含其他点,则删除该三角形。如下图所示,当前要判断的三角形为△ABC,要判断的边为边A-B,因为半径为alpha且过AB两点的圆包含点C,则从三角网中删除△ABC。
第4步:在第2-3步提到的不符合Alpha shapes要求的三角形后所得到的三角网上求出三角网的边缘。该边缘即为点集S的边缘线。