下面简单记录一下我利用ros标定相机参数的过程,Ubuntu 16.04 ,摄像头用的罗技C920
ROSwiki有相机矫正的官方文档,有单目的也有立体相机的教程,建议直接看原文,原汁原味:链接
1、相机标定第一步,准备一张标定板,打印出来下载
标定板为8x6,我用A4纸打印出来为,用直尺量square边长为24.5mm(这个根据自己标定板的大小自己量,大点好),即0.0245m,作为标定输入参数。
2、打开相机
利用usb_cam驱动 ,直接git到电脑上编译就可以运行,没安装的参考ros.wiki.usb_cam
开启roscore,打开相机
roslaunch usb_cam usb_cam-test.launch
//launch文件里面默认设备为/dev/video0,我的外接USB摄像头是/dev/video1)
//如果你没有矫正过的话,你会发现打开相机时会有一条警告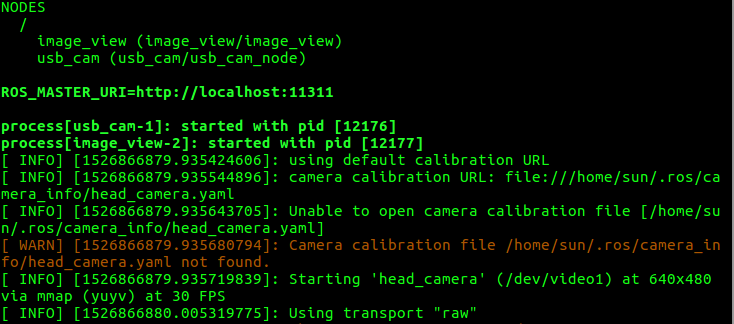
因为相机启动时自动检查矫正文件,而你还没有!哈哈
3、打开矫正窗口
一般来说正常安装ros都是包含了camera_calibration,输入下面命令检查一下
sun@sun-pc:~$ rosdep install camera_calibration
#All required rosdeps installed successfully
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.0245 image:=/usb_cam/image_raw camera:=/usb_cam应该弹出一个display的窗口如下:
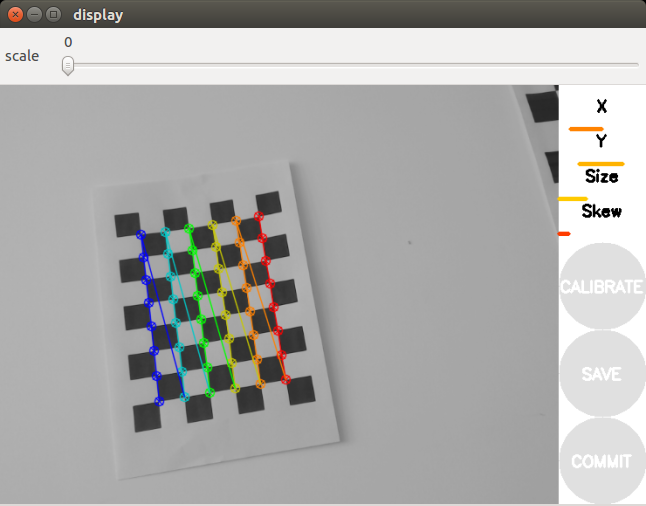
如果没有的话检查你命令输入是否输入正确,例如:8x6,中间不能用 "*" ,是字母 "x",--size,--square前面是两个"-",还要注意你的相机发出的话题是不是usb_cam/image_raw

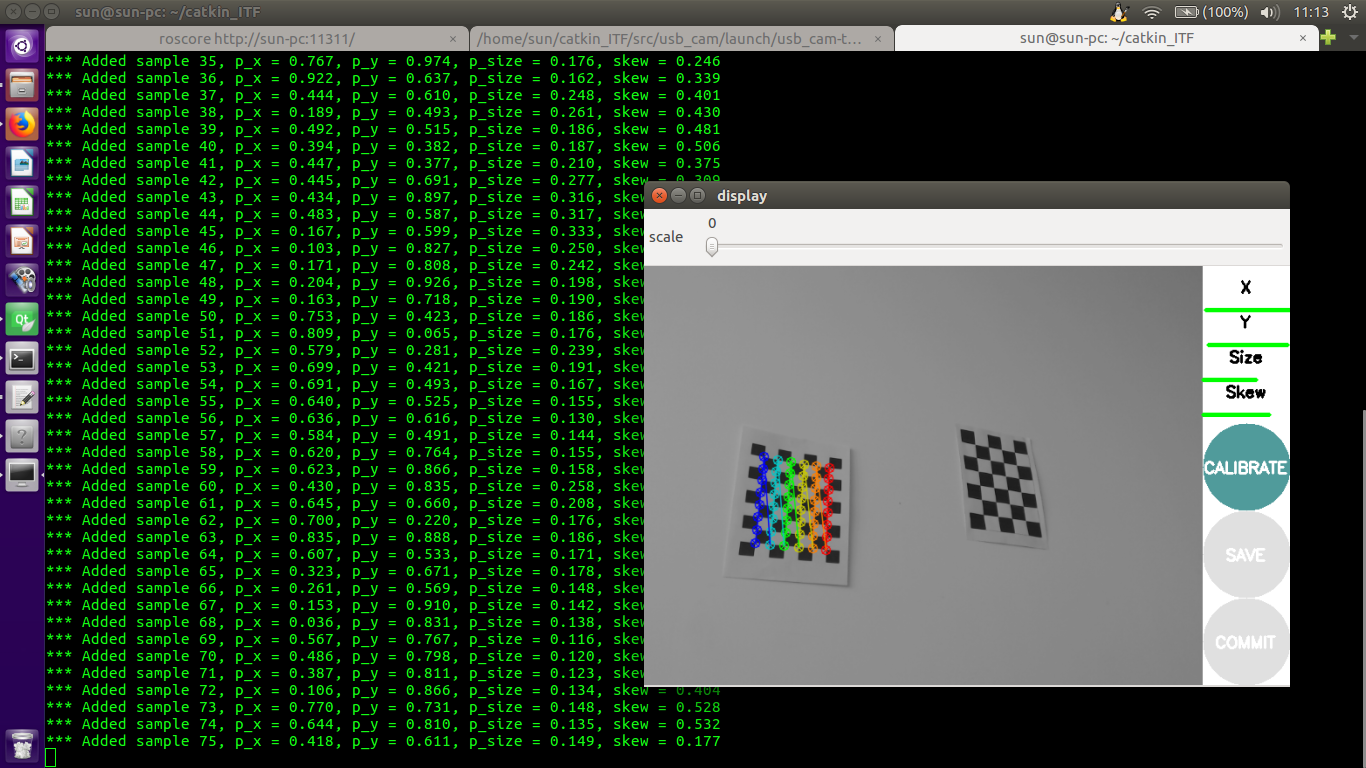
4、采集样本数据
为了得到一个好的标定结果,应该使得标定板尽量出现在摄像头视野的各个位置里:标定板出现在视野中的左边,右边,上边和下边,标定板既有倾斜的,也有水平的,离得近的远的都要有,最好保证所有的进度条都是绿色满格的 。
界面中的x:表示标定板在视野中的左右位置。
y:表示标定板在视野中的上下位置。
size:标定板在占视野的尺寸大小,也可以理解为标定板离摄像头的远近。
skew:标定板在视野上下左右中的倾斜位置。
5、计算矫正参数
点击CALIBRATE按钮,稍等1-2分钟,可以在命令窗中看到标定参数,点击COMMIT将结果保存到电脑路径:/home/sun/.ros/camera_info/head_camera.yaml,再次启动相机时就不会有Camera Calibration文件找不到的警告了。
只需加载校准文件不会纠正图像。 为了矫正图像,请使用image_proc包。
如果没有自动载入矫正文件 ,那么就需要调用下image_proc这个包。两种解决方案1.在启动usb_cam的launch文件下面再加上<node name="image_proc" pkg="image_proc" type="image_proc" ns="usb_cam"/>。2.或者启动usb_cam后,在终端命令窗口加上ROS_NAMESPACE=usb_cam rosrun image_proc image_proc。 来源于参考链接评论!
[image]
width
640
height
480
[narrow_stereo]
camera matrix
644.987121 0.000000 331.735116
0.000000 647.308571 248.505845
0.000000 0.000000 1.000000
distortion
0.248372 -0.436036 -0.008074 -0.000495 0.000000
rectification
1.000000 0.000000 0.000000
0.000000 1.000000 0.000000
0.000000 0.000000 1.000000
projection
669.478394 0.000000 331.064954 0.000000
0.000000 669.226440 245.232233 0.000000
0.000000 0.000000 1.000000 0.000000yaml格式参数:
image_width: 640
image_height: 480
camera_name: head_camera
camera_matrix:
rows: 3
cols: 3
data: [644.9871208555877, 0, 331.7351157700301, 0, 647.3085714349502, 248.5058450461932, 0, 0, 1]
distortion_model: plumb_bob
distortion_coefficients:
rows: 1
cols: 5
data: [0.2483720478627449, -0.4360360704160953, -0.008073532467450732, -0.0004951782308249399, 0]
rectification_matrix:
rows: 3
cols: 3
data: [1, 0, 0, 0, 1, 0, 0, 0, 1]
projection_matrix:
rows: 3
cols: 4
data: [669.4783935546875, 0, 331.064954159061, 0, 0, 669.2264404296875, 245.2322330954958, 0, 0, 0, 1, 0]camera_matrix规定了摄像头的 内部参数矩阵
distortion_model指定了 畸变模型
distortion_coefficients指定畸变模型的系数
rectification_matrix为矫正矩阵,一般为单位阵
projection_matrix为外部世界坐标到像平面的投影矩阵 参考链接