无人机目标识别技术
1. 几个相近的概念
图像分割、目标识别、模式识别、目标跟踪
图像分割:根据图像的像素统计特征来对图像进行分割,使得不同类的的图像分开。
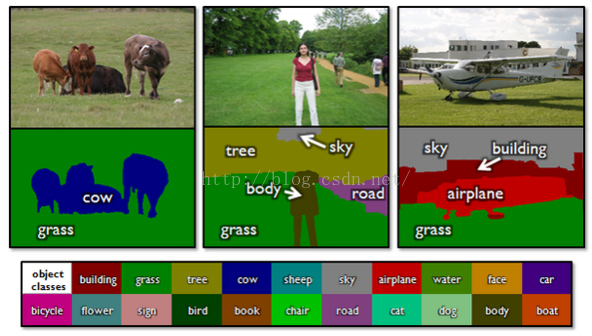
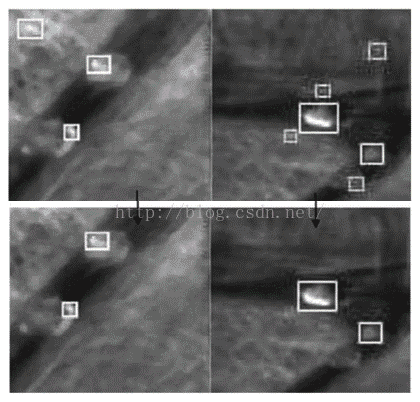
目标识别:范围广一点,所有的检测目标方法,都可以叫做目标识别;
模式识别:当我们采用特定的模式或模板来进行识别处理时;

目标跟踪:则是根据检测的目标进行进一步的跟踪,实现监测目标作用。

2. 目标识别
基于分割(阈值判断)、基于分类器、基于特征点、帧间差法、背景差分法
2.1基于分割方法
2.1.1基于传统阈值法的图像分割
所谓“阈”就是一个领域或一个系统的界限,其数值称为阈值,使用阈值进行图像分割是一种区域分割技术,对物体与背景有较强对比的图像的分割特别有效。该方法计算简单,而且总能用封闭且连通的边界,定义不相交的区域。
阈值分割的基本原理:选取一个或多个处于灰度图像范围之中的灰度阈值,然后将图像中各个像素的灰度值与阈值比较,并根据比较的结果将图像中的对应像素分成两类或多类,从而把图像划分成互不重叠的区域集合,达成图像分割的目的。
灰度直方图峰谷法
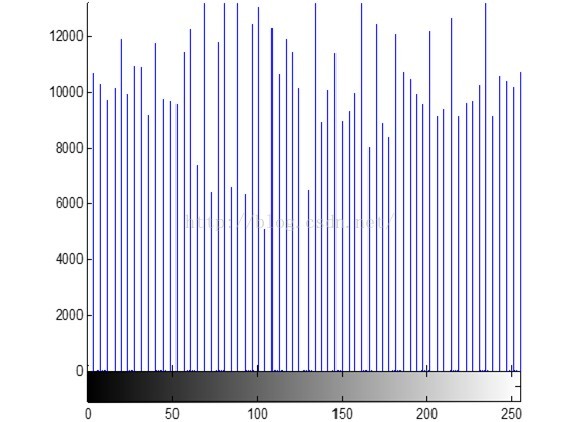
在一些简单的图像中,对目标物的灰度分布较有规律,背景和各个目标物在图像的灰度直方图中各自形成一个波峰,即区域和波峰一一对应。由于每个波峰间形成一个波谷,因为选择双峰间的波谷处所对应的灰度值为阈值,即可将两个区域分离。
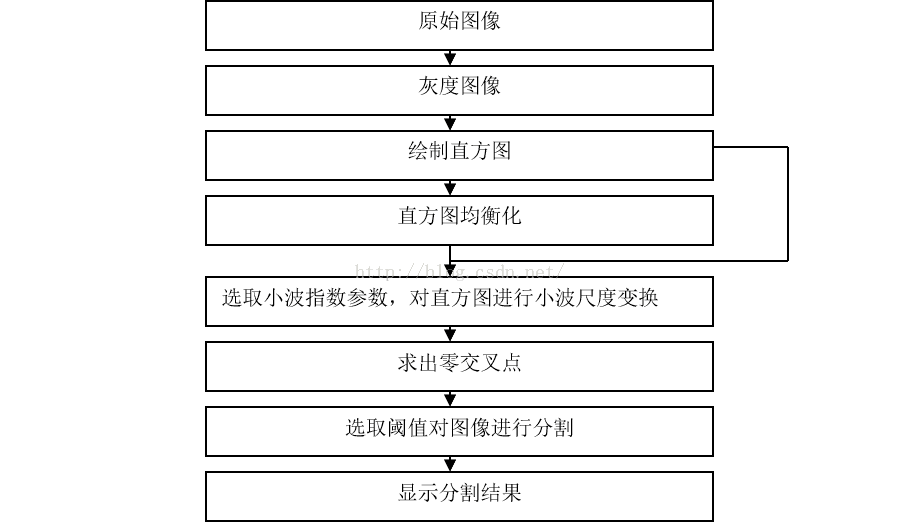
2.1.2基于小波的阈值分割
下面是Viola牛们提出的Haar-like特征:
下面是Lienhart等牛们提出的Haar-like特征:
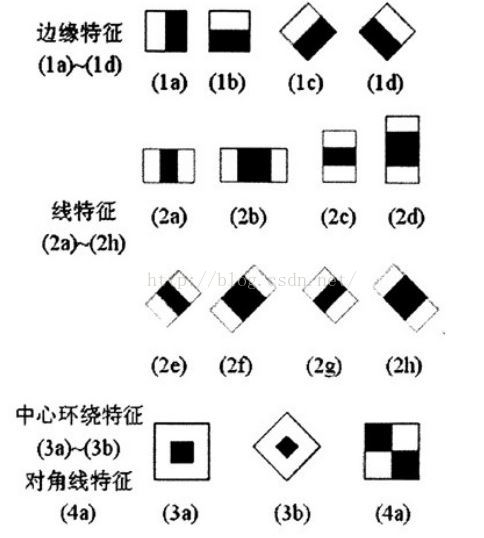
这些所谓的特征不就是一堆堆带条纹的矩形么,到底是干什么用的?我这样给出解释,将上面的任意一个矩形放到人脸区域上,然后,将白色区域的像素和减去黑色区域的像素和,得到的值我们暂且称之为人脸特征值,如果你把这个矩形放到一个非人脸区域,那么计算出的特征值应该和人脸特征值是不一样的,而且越不一样越好,所以这些方块的目的就是把人脸特征量化,以区分人脸和非人脸。
通过弱分类器组合来实现一个强分类器:
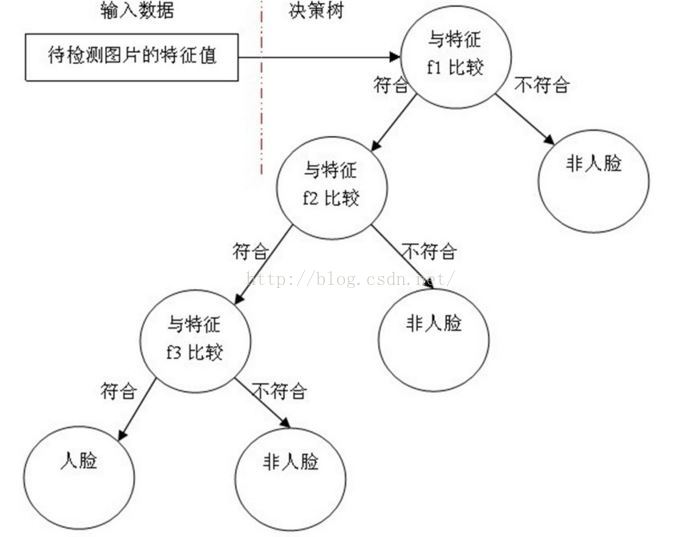
可以看出,在分类的应用中,每个非叶子节点都表示一种判断,每个路径代表一种判断的输出,每个叶子节点代表一种类别,并作为最终判断的结果。
一个弱分类器就是一个基本和上图类似的决策树,最基本的弱分类器只包含一个Haar-like特征,也就是它的决策树只有一层,被称为树桩(stump)。
最重要的就是如何决定每个结点判断的输出,要比较输入图片的特征值和弱分类器中特征,一定需要一个阈值,当输入图片的特征值大于该阈值时才判定其为人脸。训练最优弱分类器的过程实际上就是在寻找合适的分类器阈值,使该分类器对所有样本的判读误差最低。
具体操作过程如下:
1)对于每个特征 f,计算所有训练样本的特征值,并将其排序。
扫描一遍排好序的特征值,对排好序的表中的每个元素,计算下面四个值:
全部人脸样本的权重的和t1;
全部非人脸样本的权重的和t0;
在此元素之前的人脸样本的权重的和s1;
在此元素之前的非人脸样本的权重的和s0;
2)最终求得每个元素的分类误差 r = min((s1 + (t0 - s0)), (s0 + (t1 - s1)))
在表中寻找r值最小的元素,则该元素作为最优阈值。有了该阈值,我们的第一个最优弱分类器就诞生了。