1 线性滤波
1.1 平滑处理
平滑处理(smoothing)也称模糊处理(bluring),常用于减少图像上的噪点或者失真,降低图像分辨率
1.2 图像滤波与滤波器
目的:
- 抽出对象的特征作为图像识别的特征模式适应图像处理的要求
- 消除图像数字化混入的噪声
要求:
- 不能损坏图像的轮廓及边缘等重要的信息
- 图像清晰视觉效果好
平滑滤波的目的: - 模糊消除噪声
空间域平滑滤波:简单平均法,就是求邻近像元点的平均亮度值,邻域越大效果越好,但是过大会使边缘信息损失过大。
滤波器:可以把滤波器想像为一个加权系数的窗口
常用的方法: - 方框滤波:Boxblur函数
- 均值滤波(邻域平均滤波):Blur函数
- 高斯滤波:GaussianBlur函数
- 中值滤波:medianBlur函数
- 双边滤波:bilateralFilter函数
1.3 线性滤波器
低通滤波器:低频通过
高通滤波器:高频通过
带通滤波器:允许一定的频率通过
带阻滤波器:阻止一定的频率不通过
全通滤波器:频率都通过,仅改变相位
险波滤波器(Band-Stop Filter):阻止一个狭窄频率范围通过
1.4 邻域算子与线性领域滤波
输出像素值 时输入像素值 的加权和
我们称之为==核==,是滤波器的加权系数
1.5 方框滤波(box Filter)
void boxFilter(InputArray src,OutputArray dst,int ddepth,Size ksize, Point anchor = Point(-1,-1),boolnormalize = true,int borderType = BORDER_DEFAULT)- InputArray类型的src,输入图像,为==CV_8U,CV_16U,CV_16S,CV_32F,CV_64F==之一
- OutputArray类型的dst,需要和源图片有一样的尺寸和类型
- int类型的ddepth输出图像的深度,-1表示使用原图的深度
- Size类型的ksize,内核的大小
- Point类型的anchor,表示锚点(平滑的点),Point(-1,-1)表示取核的中心为锚点
- 表示内在是否被其区域归一化
- 推断图像外部像素的某种边界模式
1.6 均值滤波
理论分析
m为模板中包含当前像素在内的像素的个数
缺陷
不能保护图像细节,在图像去噪的同时也破坏图像的细节
blur函数
==作用==:对输入图像src进行均值滤波后用dst输出
void blur(InputArray src, OutputArray dst,Size ksize,Point anchor= Point(-1,-1),int borderType = BORDER_DEFAULT)类型同上
1.7 高斯滤波
理论
其视觉效果就像经过一个半透明屏幕在观察图像,图像的高斯模糊过程就是图像与正态分布做卷积。高斯函数的傅里叶变换就是另一个高斯函数,所以高斯模糊是一个低通滤波操作。
一维零均值高斯函数
二维高斯函数
GaussianBlur函数
void GaussianBlur(InputArray src, OutputArray dst,Size ksize,double sigmaX,double sigmaY = 0,intborderType = BORDER_DEFAULT)- double 类型的sigmaX,表示高斯核函数在X方向的标准偏差
- double类型的sigmaY,表示高斯核函数在Y方向的标准偏差
1.8 Opencv源码
1. boxFilter函数源码
void cv::boxFilter( InputArray _src, OutputArray _dst, int ddepth,
Size ksize, Point anchor,
bool normalize, int borderType )
{
CV_INSTRUMENT_REGION()
CV_OCL_RUN(_dst.isUMat() &&
(borderType == BORDER_REPLICATE || borderType == BORDER_CONSTANT ||
borderType == BORDER_REFLECT || borderType == BORDER_REFLECT_101),
ocl_boxFilter3x3_8UC1(_src, _dst, ddepth, ksize, anchor, borderType, normalize))
CV_OCL_RUN(_dst.isUMat(), ocl_boxFilter(_src, _dst, ddepth, ksize, anchor, borderType, normalize))
Mat src = _src.getMat();//复制原图到到临时变量
int stype = src.type(), sdepth = CV_MAT_DEPTH(stype), cn = CV_MAT_CN(stype);
//处理ddepth小于零的情况
if( ddepth < 0 )
ddepth = sdepth;
_dst.create( src.size(), CV_MAKETYPE(ddepth, cn) );
Mat dst = _dst.getMat();
if( borderType != BORDER_CONSTANT && normalize && (borderType & BORDER_ISOLATED) != 0 )
{
if( src.rows == 1 )
ksize.height = 1;
if( src.cols == 1 )
ksize.width = 1;
}
Point ofs;
Size wsz(src.cols, src.rows);
if(!(borderType&BORDER_ISOLATED))
src.locateROI( wsz, ofs );
CALL_HAL(boxFilter, cv_hal_boxFilter, src.ptr(), src.step, dst.ptr(), dst.step, src.cols, src.rows, sdepth, ddepth, cn,
ofs.x, ofs.y, wsz.width - src.cols - ofs.x, wsz.height - src.rows - ofs.y, ksize.width, ksize.height,
anchor.x, anchor.y, normalize, borderType&~BORDER_ISOLATED);
CV_OVX_RUN(true,
openvx_boxfilter(src, dst, ddepth, ksize, anchor, normalize, borderType))
CV_IPP_RUN_FAST(ipp_boxfilter(src, dst, ksize, anchor, normalize, borderType));
borderType = (borderType&~BORDER_ISOLATED);
Ptr<FilterEngine> f = createBoxFilter( src.type(), dst.type(),
ksize, anchor, normalize, borderType );
f->apply( src, dst, wsz, ofs );
}2. GauusianBlur函数
void cv::GaussianBlur( InputArray _src, OutputArray _dst, Size ksize,
double sigma1, double sigma2,
int borderType )
{
CV_INSTRUMENT_REGION()
int type = _src.type();
Size size = _src.size();
_dst.create( size, type );
if( (borderType & ~BORDER_ISOLATED) != BORDER_CONSTANT &&
((borderType & BORDER_ISOLATED) != 0 || !_src.getMat().isSubmatrix()) )
{
if( size.height == 1 )
ksize.height = 1;
if( size.width == 1 )
ksize.width = 1;
}
if( ksize.width == 1 && ksize.height == 1 )
{
_src.copyTo(_dst);
return;
}
bool useOpenCL = (ocl::isOpenCLActivated() && _dst.isUMat() && _src.dims() <= 2 &&
((ksize.width == 3 && ksize.height == 3) ||
(ksize.width == 5 && ksize.height == 5)) &&
_src.rows() > ksize.height && _src.cols() > ksize.width);
(void)useOpenCL;
int sdepth = CV_MAT_DEPTH(type), cn = CV_MAT_CN(type);
if(sdepth == CV_8U && ((borderType & BORDER_ISOLATED) || !_src.getMat().isSubmatrix()))
{
std::vector<ufixedpoint16> fkx, fky;
createGaussianKernels(fkx, fky, type, ksize, sigma1, sigma2);
Mat src = _src.getMat();
Mat dst = _dst.getMat();
if (src.data == dst.data)
src = src.clone();
fixedSmoothInvoker<uint8_t, ufixedpoint16> invoker(src.ptr<uint8_t>(), src.step1(), dst.ptr<uint8_t>(), dst.step1(), dst.cols, dst.rows, dst.channels(), &fkx[0], (int)fkx.size(), &fky[0], (int)fky.size(), borderType & ~BORDER_ISOLATED);
parallel_for_(Range(0, dst.rows), invoker, std::max(1, std::min(getNumThreads(), getNumberOfCPUs())));
return;
}
Mat kx, ky;
createGaussianKernels(kx, ky, type, ksize, sigma1, sigma2);
CV_OCL_RUN(useOpenCL, ocl_GaussianBlur_8UC1(_src, _dst, ksize, CV_MAT_DEPTH(type), kx, ky, borderType));
CV_OCL_RUN(_dst.isUMat() && _src.dims() <= 2 && (size_t)_src.rows() > kx.total() && (size_t)_src.cols() > kx.total(),
ocl_sepFilter2D(_src, _dst, sdepth, kx, ky, Point(-1, -1), 0, borderType))
Mat src = _src.getMat();
Mat dst = _dst.getMat();
Point ofs;
Size wsz(src.cols, src.rows);
if(!(borderType & BORDER_ISOLATED))
src.locateROI( wsz, ofs );
CALL_HAL(gaussianBlur, cv_hal_gaussianBlur, src.ptr(), src.step, dst.ptr(), dst.step, src.cols, src.rows, sdepth, cn,
ofs.x, ofs.y, wsz.width - src.cols - ofs.x, wsz.height - src.rows - ofs.y, ksize.width, ksize.height,
sigma1, sigma2, borderType&~BORDER_ISOLATED);
CV_OVX_RUN(true,
openvx_gaussianBlur(src, dst, ksize, sigma1, sigma2, borderType))
CV_IPP_RUN_FAST(ipp_GaussianBlur(src, dst, ksize, sigma1, sigma2, borderType));
sepFilter2D(src, dst, sdepth, kx, ky, Point(-1, -1), 0, borderType);
}
1.9 实现
方框滤波
//---------------------------【头文件、命名空间】----------
// 描述:包含程序所需要头文件和命名空间
//------------------------------------------------------
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace cv;
//---------------------------【main函数】----------------
// 描述:控制台应用程序入口函数
//------------------------------------------------------
int main()
{
//载入图像
Mat image = imread("1.jpg");
//创建窗口
namedWindow("均值滤波【原图】");
namedWindow("均值滤波【效果图】");
//显示原图
imshow("均值滤波【原图】", image);
//进行滤波操作
Mat out;
boxFilter(image, out, -1, Size(5, 5));
//显示效果图
imshow("均值滤波【效果图】", out);
waitKey(0);
return 0;
}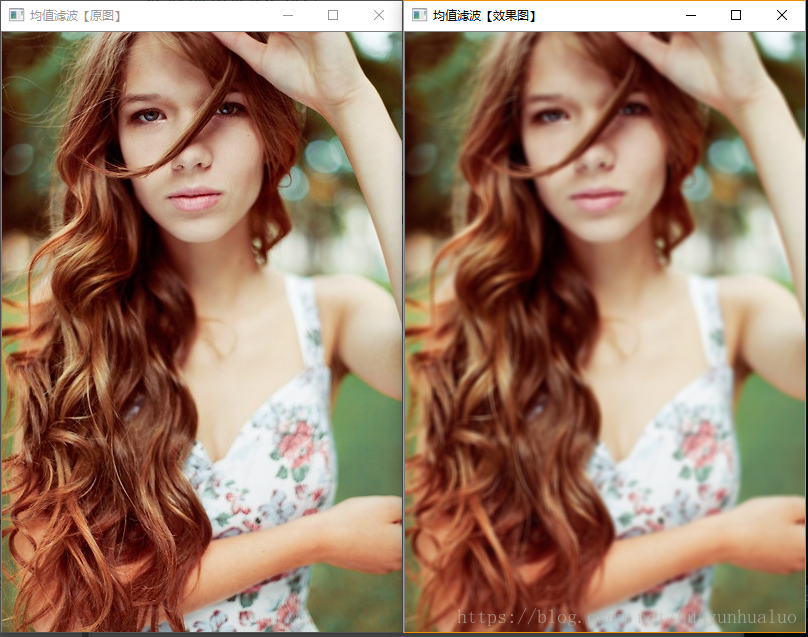
均值滤波
//---------------------------【头文件、命名空间】----------
// 描述:包含程序所需要头文件和命名空间
//------------------------------------------------------
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace cv;
//---------------------------【main函数】----------------
// 描述:控制台应用程序入口函数
//------------------------------------------------------
int main()
{
//载入图像
Mat image = imread("1.jpg");
//创建窗口
namedWindow("均值滤波【原图】");
namedWindow("均值滤波【效果图】");
//显示原图
imshow("均值滤波【原图】", image);
//进行滤波操作
Mat out;
blur(image, out, -1, Size(7, 7));
//显示效果图
imshow("均值滤波【效果图】", out);
waitKey(0);
return 0;
}
高斯滤波
//---------------------------【头文件、命名空间】----------
// 描述:包含程序所需要头文件和命名空间
//------------------------------------------------------
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace cv;
//---------------------------【main函数】----------------
// 描述:控制台应用程序入口函数
//------------------------------------------------------
int main()
{
//载入图像
Mat image = imread("1.jpg");
//创建窗口
namedWindow("高斯滤波【原图】");
namedWindow("高斯滤波【效果图】");
//显示原图
imshow("高斯滤波【原图】", image);
//进行滤波操作
Mat out;
GaussianBlur(image, out, Size(3, 3),0,0);
//显示效果图
imshow("高斯滤波【效果图】", out);
waitKey(0);
return 0;
}
1.10 综合示例
//---------------------------【头文件、命名空间】----------
// 描述:包含程序所需要头文件和命名空间
//------------------------------------------------------
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream>
using namespace std;
using namespace cv;
//---------------------------【全局变量声明部分】-----------------
// 描述:全局变量声明
//-------------------------------------------------------------
// 存储图片的Mat类型
Mat g_srcImage, g_dstImage1, g_dstImage2, g_dstImage3;
int g_nBoxFilterValue = 3; //方框滤波参数值
int g_nMeanBlurValue = 3; //均值滤波参数值
int g_nGaussianBlurValue = 3; // 高斯滤波参数值
//---------------------------【全局函数声明部分】----------------
// 描述:全局函数声明
//------------------------------------------------------------
//轨迹条回调函数
static void on_BoxFilter(int, void *); //方框滤波
static void on_MeanBlur(int, void *); //均值滤波
static void on_GaussianBlur(int, void *); //高斯滤波
//---------------------------【main函数】----------------
// 描述:控制台应用程序入口函数
//------------------------------------------------------
int main()
{
//改变console字体颜色
system("color5E");
//载入原图
g_srcImage = imread("1.jpg", 1);
if (!g_srcImage.data)
{
printf("读取srcImage错误~!\n");
return false;
}
//复制原图
g_dstImage1 = g_srcImage.clone();
g_dstImage2 = g_srcImage.clone();
g_dstImage3 = g_srcImage.clone();
namedWindow("【<0>原图窗口】", 1);
imshow("【<0>原图窗口】", g_srcImage);
//----------------------------【<1>方框滤波】---------------------
//创建窗口
namedWindow("【<1>方框滤波】", 1);
//创建轨迹条
createTrackbar("内核值:", "【<1>方框滤波】", &g_nBoxFilterValue, 40, on_BoxFilter);
on_BoxFilter(g_nBoxFilterValue, 0);
imshow("【<1>方框滤波】", g_dstImage1);
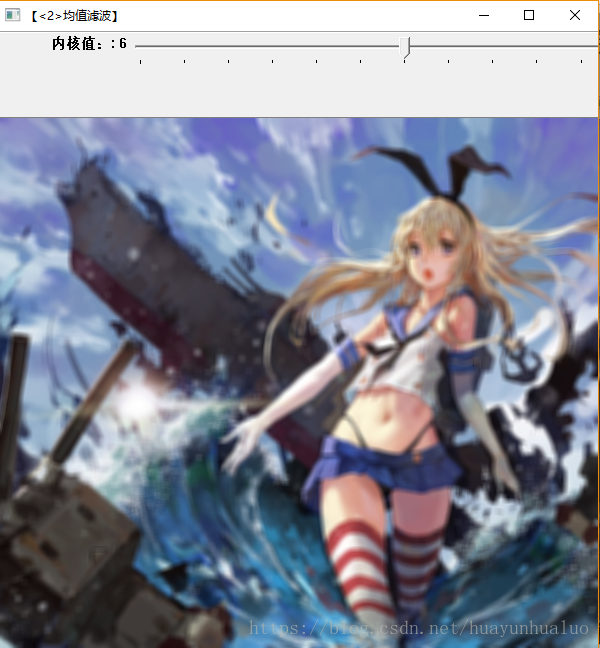
//----------------------------【<2>均值滤波】----------------------
//创建窗口
namedWindow("【<2>均值滤波】", 1);
//创建轨迹条
createTrackbar("内核值:", "【<2>均值滤波】", &g_nMeanBlurValue, 40, on_MeanBlur);
on_MeanBlur(g_nMeanBlurValue, 0);
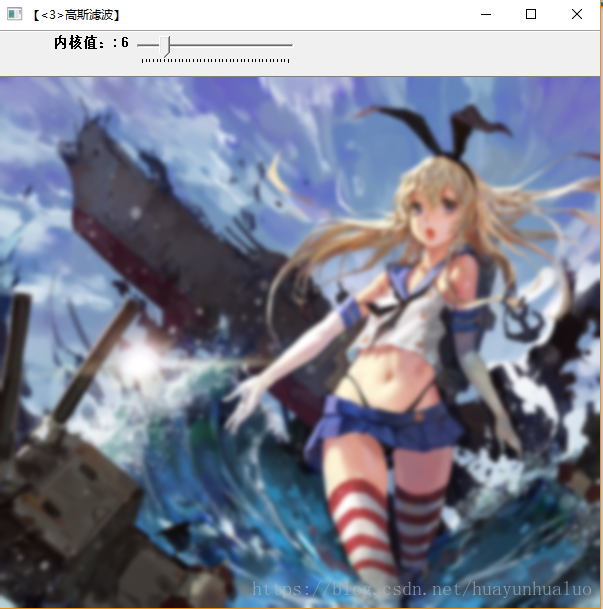
//-----------------------------【<3>高斯滤波】--------------------
//创建窗口
namedWindow("【<3>高斯滤波】", 1);
//创建轨迹条
createTrackbar("内核值:", "【<3>高斯滤波】", &g_nGaussianBlurValue, 40, on_GaussianBlur);
on_GaussianBlur(g_nGaussianBlurValue, 0);
//输出帮助信息
cout << endl << "\t 请调滚动条观察效果图~\n\n" << "\t 按下“q”键时,程序退出~!\n";
//按下"q"键,程序退出
while (char(waitKey(1)) != 'q') {}
waitKey(0);
return 0;
}
//----------------------------【on_BoxFilter()函数】-------------------
// 描述:方框滤波操作的回调函数
//--------------------------------------------------------------------
static void on_BoxFilter(int, void *)
{
// 方框滤波
boxFilter(g_srcImage, g_dstImage1, -1, Size(g_nBoxFilterValue + 1, g_nBoxFilterValue + 1));
//显示窗口
imshow("【<1>方框滤波】", g_dstImage1);
}
//----------------------------【on_MeanBlur()函数】-------------------
// 描述:均值滤波操作的回调函数
//--------------------------------------------------------------------
static void on_MeanBlur(int, void *)
{
//均值滤波
blur(g_srcImage, g_dstImage2, Size(g_nMeanBlurValue + 1, g_nMeanBlurValue + 1), Point(-1, -1));
//显示窗口
imshow("【<2>均值滤波】", g_dstImage2);
}
//----------------------------【on_GaussianBlur()函数】-------------------
// 描述:高斯滤波操作的回调函数
//--------------------------------------------------------------------
static void on_GaussianBlur(int, void *)
{
//高斯滤波
GaussianBlur(g_srcImage, g_dstImage3, Size(g_nGaussianBlurValue * 2 + 1, g_nGaussianBlurValue * 2 + 1), 0, 0);
//显示窗口
imshow("【<3>高斯滤波】", g_dstImage3);
}