https://blog.csdn.net/Young_Gy/article/details/73485518
强化学习在alphago中大放异彩,本文将简要介绍强化学习的一种q-learning。先从最简单的q-table下手,然后针对state过多的问题引入q-network,最后通过两个例子加深对q-learning的理解。
强化学习
强化学习通常包括两个实体agent和environment。两个实体的交互如下,在environment的statestst下,agent采取actionatat进而得到rewardrtrt 并进入statest+1st+1。
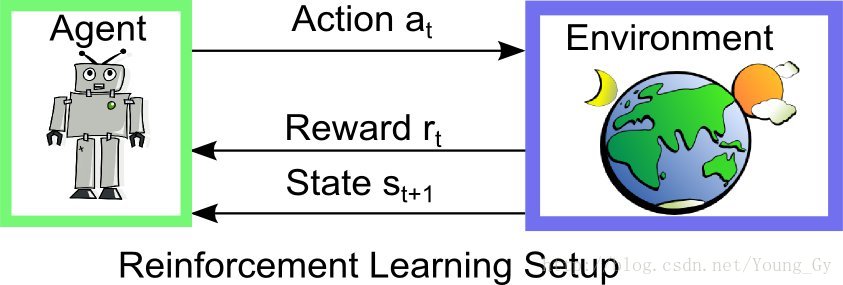
强化学习的问题,通常有如下特点:
- 不同的action产生不同的reward
- reward有延迟性
- 对某个action的reward是基于当前的state的
Q-learning
Q-Table
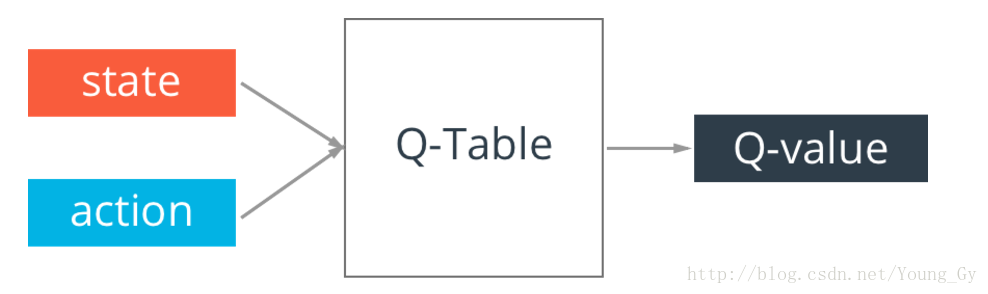
Q-learning的核心是Q-table。Q-table的行和列分别表示state和action的值,Q-table的值Q(s,a)Q(s,a)衡量当前states采取actiona到底有多好。
Bellman Equation
在训练的过程中,我们使用Bellman Equation去更新Q-table。
Bellman Equation解释如下:Q(s,a)Q(s,a)表示成当前ss采取aa后的即时rr,加上折价γγ后的最大reward max(Q(s′,a′)max(Q(s′,a′)。
算法
根据Bellman Equation,学习的最终目的是得到Q-table,算法如下:
- 外循环模拟次数num_episodes
- 内循环每次模拟最大步数num_steps
- 根据当前的state和q-table选择action(可加入随机性)
- 根据当前的state和action获得下一步的state和reward
- 更新q-table: Q[s,a] = Q[s,a] + lr*(r + y*np.max(Q[s1,:]) - Q[s,a])
实例
以FrozenLake为例,代码如下:
# import lib
import gym
import numpy as np
# Load the environment env = gym.make('FrozenLake-v0') # Implement Q-Table learning algorithm #Initialize table with all zeros Q = np.zeros([env.observation_space.n,env.action_space.n]) # Set learning parameters lr = .8 y = .95 num_episodes = 2000 #create lists to contain total rewards and steps per episode #jList = [] rList = [] for i in range(num_episodes): #Reset environment and get first new observation s = env.reset() rAll = 0 d = False j = 0 #The Q-Table learning algorithm while j < 99: j+=1 #Choose an action by greedily (with noise) picking from Q table a = np.argmax(Q[s,:] + np.random.randn(1,env.action_space.n)*(1./(i+1))) #Get new state and reward from environment s1,r,d,_ = env.step(a) #Update Q-Table with new knowledge Q[s,a] = Q[s,a] + lr*(r + y*np.max(Q[s1,:]) - Q[s,a]) rAll += r s = s1 if d == True: break #jList.append(j) rList.append(rAll) print "Score over time: " + str(sum(rList)/num_episodes) print "Final Q-Table Values" print Q- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
Deep-Q-learning
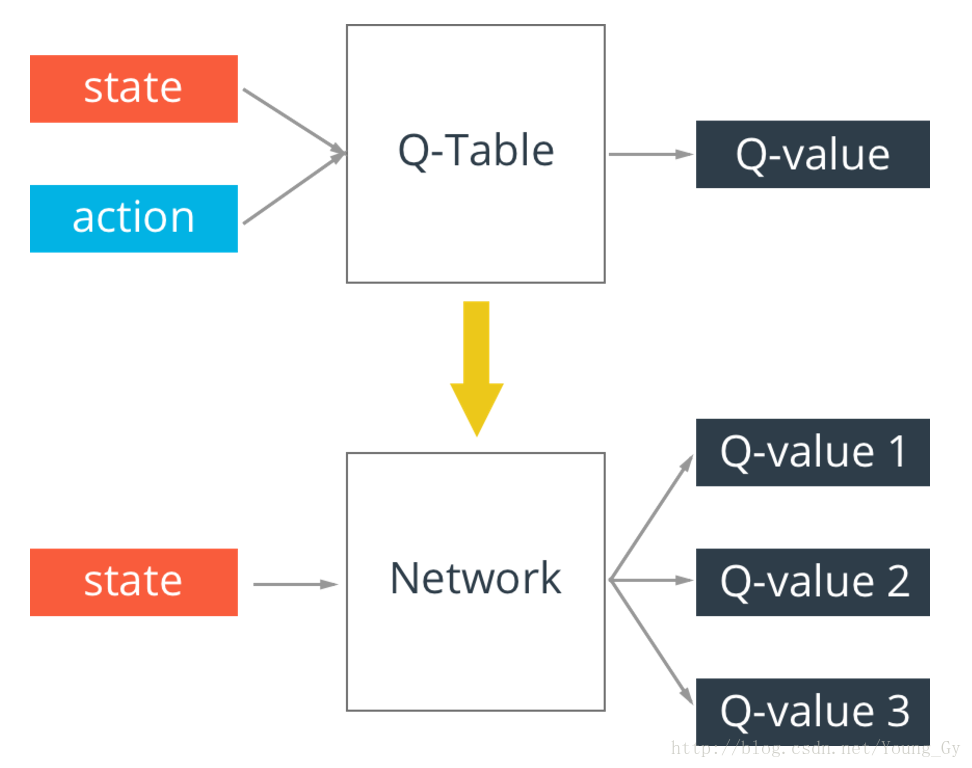
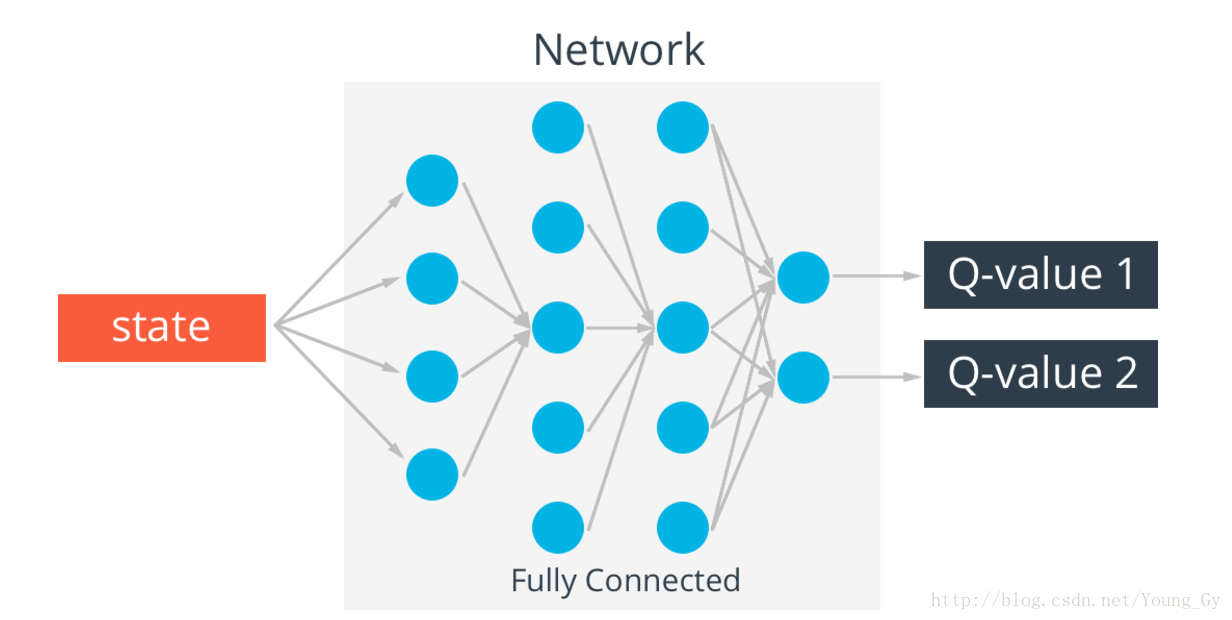
q-table存在一个问题,真实情况的state可能无穷多,这样q-table就会无限大,解决这个问题的办法是通过神经网络实现q-table。输入state,输出不同action的q-value。
Experience replay
强化学习由于state之间的相关性存在稳定性的问题,解决的办法是在训练的时候存储当前训练的状态到记忆体MM,更新参数的时候随机从MM中抽样mini-batch进行更新。
具体地,MM中存储的数据类型为 <s,a,r,s′><s,a,r,s′>,MM有最大长度的限制,以保证更新采用的数据都是最近的数据。
Exploration - Exploitation
- Exploration:在刚开始训练的时候,为了能够看到更多可能的情况,需要对action加入一定的随机性。
- Exploitation:随着训练的加深,逐渐降低随机性,也就是降低随机action出现的概率。
算法
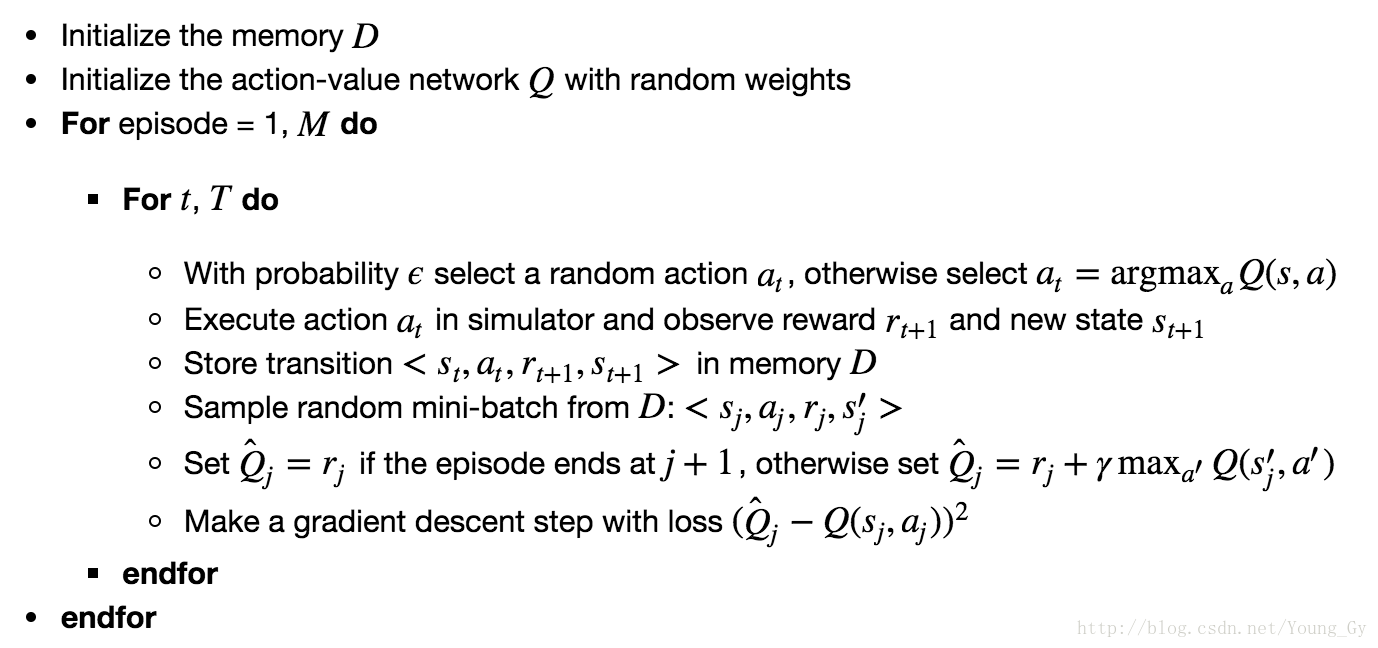
实例
CartPole
# import lib
import gym
import tensorflow as tf
import numpy as np # Create the Cart-Pole game environment env = gym.make('CartPole-v0') # Q-network class QNetwork: def __init__(self, learning_rate=0.01, state_size=4, action_size=2, hidden_size=10, name='QNetwork'): # state inputs to the Q-network with tf.variable_scope(name): self.inputs_ = tf.placeholder(tf.float32, [None, state_size], name='inputs') # One hot encode the actions to later choose the Q-value for the action self.actions_ = tf.placeholder(tf.int32, [None], name='actions') one_hot_actions = tf.one_hot(self.actions_, action_size) # Target Q values for training self.targetQs_ = tf.placeholder(tf.float32, [None], name='target') # ReLU hidden layers self.fc1 = tf.contrib.layers.fully_connected(self.inputs_, hidden_size) self.fc2 = tf.contrib.layers.fully_connected(self.fc1, hidden_size) # Linear output layer self.output = tf.contrib.layers.fully_connected(self.fc2, action_size, activation_fn=None) ### Train with loss (targetQ - Q)^2 # output has length 2, for two actions. This next line chooses # one value from output (per row) according to the one-hot encoded actions. self.Q = tf.reduce_sum(tf.multiply(self.output, one_hot_actions), axis=1) self.loss = tf.reduce_mean(tf.square(self.targetQs_ - self.Q)) self.opt = tf.train.AdamOptimizer(learning_rate).minimize(self.loss) # Experience replay from collections import deque class Memory(): def __init__(self, max_size = 1000): self.buffer = deque(maxlen=max_size) def add(self, experience): self.buffer.append(experience) def sample(self, batch_size): idx = np.random.choice(np.arange(len(self.buffer)), size=batch_size, replace=False) return [self.buffer[ii] for ii in idx] # hyperparameters train_episodes = 1000 # max number of episodes to learn from max_steps = 200 # max steps in an episode gamma = 0.99 # future reward discount # Exploration parameters explore_start = 1.0 # exploration probability at start explore_stop = 0.01 # minimum exploration probability decay_rate = 0.0001 # exponential decay rate for exploration prob # Network parameters hidden_size = 64 # number of units in each Q-network hidden layer learning_rate = 0.0001 # Q-network learning rate # Memory parameters memory_size = 10000 # memory capacity batch_size = 20 # experience mini-batch size pretrain_length = batch_size # number experiences to pretrain the memory tf.reset_default_graph() mainQN = QNetwork(name='main', hidden_size=hidden_size, learning_rate=learning_rate) # Populate the experience memory # Initialize the simulation env.reset() # Take one random step to get the pole and cart moving state, reward, done, _ = env.step(env.action_space.sample()) memory = Memory(max_size=memory_size) # Make a bunch of random actions and store the experiences for ii in range(pretrain_length): # Uncomment the line below to watch the simulation # env.render() # Make a random action action = env.action_space.sample() next_state, reward, done, _ = env.step(action) if done: # The simulation fails so no next state next_state = np.zeros(state.shape) # Add experience to memory memory.add((state, action, reward, next_state)) # Start new episode env.reset() # Take one random step to get the pole and cart moving state, reward, done, _ = env.step(env.action_space.sample()) else: # Add experience to memory memory.add((state, action, reward, next_state)) state = next_state # Training # Now train with experiences saver = tf.train.Saver() rewards_list = [] with tf.Session() as sess: # Initialize variables sess.run(tf.global_variables_initializer()) step = 0 for ep in range(1, train_episodes): total_reward = 0 t = 0 while t < max_steps: step += 1 # Uncomment this next line to watch the training env.render() # Explore or Exploit explore_p = explore_stop + (explore_start - explore_stop)*np.exp(-decay_rate*step) if explore_p > np.random.rand(): # Make a random action action = env.action_space.sample() else: # Get action from Q-network feed = {mainQN.inputs_: state.reshape((1, *state.shape))} Qs = sess.run(mainQN.output, feed_dict=feed) action = np.argmax(Qs) # Take action, get new state and reward next_state, reward, done, _ = env.step(action) total_reward += reward if done: # the episode ends so no next state next_state = np.zeros(state.shape) t = max_steps print('Episode: {}'.format(ep), 'Total reward: {}'.format(total_reward), 'Training loss: {:.4f}'.format(loss), 'Explore P: {:.4f}'.format(explore_p)) rewards_list.append((ep, total_reward)) # Add experience to memory memory.add((state, action, reward, next_state)) # Start new episode env.reset() # Take one random step to get the pole and cart moving state, reward, done, _ = env.step(env.action_space.sample()) else: # Add experience to memory memory.add((state, action, reward, next_state)) state = next_state t += 1 # Sample mini-batch from memory batch = memory.sample(batch_size) states = np.array([each[0] for each in batch]) actions = np.array([each[1] for each in batch]) rewards = np.array([each[2] for each in batch]) next_states = np.array([each[3] for each in batch]) # Train network target_Qs = sess.run(mainQN.output, feed_dict={mainQN.inputs_: next_states}) # Set target_Qs to 0 for states where episode ends episode_ends = (next_states == np.zeros(states[0].shape)).all(axis=1) target_Qs[episode_ends] = (0, 0) targets = rewards + gamma * np.max(target_Qs, axis=1) loss, _ = sess.run([mainQN.loss, mainQN.opt], feed_dict={mainQN.inputs_: states, mainQN.targetQs_: targets, mainQN.actions_: actions}) saver.save(sess, "checkpoints/cartpole.ckpt") # Testing test_episodes = 10 test_max_steps = 400 env.reset() with tf.Session() as sess: saver.restore(sess, tf.train.latest_checkpoint('checkpoints')) for ep in range(1, test_episodes): t = 0 while t < test_max_steps: env.render() # Get action from Q-network feed = {mainQN.inputs_: state.reshape((1, *state.shape))} Qs = sess.run(mainQN.output, feed_dict=feed) action = np.argmax(Qs) # Take action, get new state and reward next_state, reward, done, _ = env.step(action) if done: t = test_max_steps env.reset() # Take one random step to get the pole and cart moving state, reward, done, _ = env.step(env.action_space.sample()) else: state = next_state t += 1 env.close()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
FrozenLake
# import lib
import gym
import numpy as np
import random import tensorflow as tf import matplotlib.pyplot as plt %matplotlib inline # laod env env = gym.make('FrozenLake-v0') # The Q-Network Approach tf.reset_default_graph() #These lines establish the feed-forward part of the network used to choose actions inputs1 = tf.placeholder(shape=[1,16],dtype=tf.float32) W = tf.Variable(tf.random_uniform([16,4],0,0.01)) Qout = tf.matmul(inputs1,W) predict = tf.argmax(Qout,1) #Below we obtain the loss by taking the sum of squares difference between the target and prediction Q values. nextQ = tf.placeholder(shape=[1,4],dtype=tf.float32) loss = tf.reduce_sum(tf.square(nextQ - Qout)) trainer = tf.train.GradientDescentOptimizer(learning_rate=0.1) updateModel = trainer.minimize(loss) # Training init = tf.initialize_all_variables() # Set learning parameters y = .99 e = 0.1 num_episodes = 2000 #create lists to contain total rewards and steps per episode jList = [] rList = [] with tf.Session() as sess: sess.run(init) for i in range(num_episodes): #Reset environment and get first new observation s = env.reset() rAll = 0 d = False j = 0 #The Q-Network while j < 99: j+=1 #Choose an action by greedily (with e chance of random action) from the Q-network a,allQ = sess.run([predict,Qout],feed_dict={inputs1:np.identity(16)[s:s+1]}) if np.random.rand(1) < e: a[0] = env.action_space.sample() #Get new state and reward from environment s1,r,d,_ = env.step(a[0]) #Obtain the Q' values by feeding the new state through our network Q1 = sess.run(Qout,feed_dict={inputs1:np.identity(16)[s1:s1+1]}) #Obtain maxQ' and set our target value for chosen action. maxQ1 = np.max(Q1) targetQ = allQ targetQ[0,a[0]] = r + y*maxQ1 #Train our network using target and predicted Q values _,W1 = sess.run([updateModel,W],feed_dict={inputs1:np.identity(16)[s:s+1],nextQ:targetQ}) rAll += r s = s1 if d == True: #Reduce chance of random action as we train the model. e = 1./((i/50) + 10) break jList.append(j) rList.append(rAll) print "Percent of succesful episodes: " + str(sum(rList)/num_episodes) + "%" - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
参考资料
- Simple Reinforcement Learning with Tensorflow Part 0: Q-Learning with Tables and Neural Networks
- Udacity Deep Learning Nano Degree