一. Actor Critic
1.基本概念
Actor Critic 为类似于Policy Gradient 和 Q-Learning 等以值为基础的算法的组合。
a. 其中Actor 类似于Policy Gradient,以状态s为输入,神经网络输出动作actions,并从在这些连续动作中按照一定的概率选取合适的动作action。
b. Critic 类似于 Q-Learning 等以值为基础的算法,由于在Actor模块中选择了合适的动作action,通过与环境交互可得到新的状态s_, 奖励r,将状态 s_作为神经网络的输入,得到v_,而原来的状态s通过神经网络输出后得到v。
c. 通过公式
得到状态之间的差
,最后通过状态s,动作action,以及误差
更新Actor网络的参数,实现单步更新。
d. 将s_ 状态赋予给 s 状态。
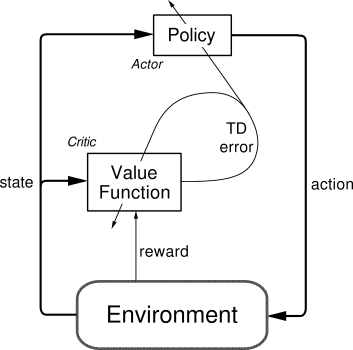
所以,Actor Critic 结合了 Policy Gradient(Actor)和 Function Approximation Critic)。Actor 基于概率选择行为,Critic 基于 Actor 的行为评判行为的得分,Actor 根据 Critic 的评分修改选择行为。
Actor Critic 方法的优势:可以进行单步更新,比传统的Policy Gradient 要快。
Actor Critic 方法的劣势:取决于Critic的价值判断,但是Critic难收敛,再加上Actor的更新,就更难收敛了。为了解决收敛的问题,有改进版的 Deep Deterministic Policy Gradient (DDPG),不仅仅融合了DQN的优势,同时解决了难收敛的问题。
2.代码框架
Actor:
class Actor(object):
def __init__(self, sess, n_features, n_actions, lr=0.001):
# 用 tensorflow 建立 Actor 神经网络,
# 搭建好训练的 Graph.
def learn(self, s, a, td):
# s, a 用于产生 Gradient ascent 的方向,
# td 来自 Critic, 用于告诉 Actor 这方向对不对.
def choose_action(self, s):
# 根据 s 选 行为 aCritic
class Critic(object):
def __init__(self, sess, n_features, lr=0.01):
# 用 tensorflow 建立 Critic 神经网络,
# 搭建好训练的 Graph.
def learn(self, s, r, s_):
# 学习 状态的价值 (state value), 不是行为的价值 (action value),
# 计算 TD_error = (r + v_) - v,
# 用 TD_error 评判这一步的行为有没有带来比平时更好的结果,
# 可以把它看做 Advantage
return # 学习时产生的 TD_errorActor 想要最大化期望的 reward,在Actor Critic算法中,我们用“比平常好多少”(td_error)来当做reward,所以就是:
with tf.variable_scope('exp_v'):
log_prob = tf.log(self.acts_prob[0, self.a]) # log 动作概率
self.exp_v = tf.reduce_mean(log_prob * self.td_error) # log 概率 * TD 方向
with tf.variable_scope('train'):
# 因为我们想不断增加这个 exp_v (动作带来的额外价值),
# 所以我们用过 minimize(-exp_v) 的方式达到
# maximize(exp_v) 的目的
self.train_op = tf.train.AdamOptimizer(lr).minimize(-self.exp_v)Critic 更新很简单,就是像Q Learning 那样更新现实和估计的误差(td_error)就好了
with tf.variable_scope('squared_TD_error'):
self.td_error = self.r + GAMMA * self.v_ - self.v
self.loss = tf.square(self.td_error) # TD_error = (r+gamma*V_next) - V_eval
with tf.variable_scope('train'):
self.train_op = tf.train.AdamOptimizer(lr).minimize(self.loss)完整代码见:莫烦PYTHON Actor Critic
二. Deep Deterministic Policy Gradient (DDPG)
1.基本概念
DDPG 可以分为 ‘DEEP’ 和 ‘Deterministic Policy Gradient’,然后‘Deterministic Policy Gradient’ 又能被细分为 ‘Deterministic’ 和 ‘Policy Gradient’。
其中 DEEP 就是走向更深层次,使用一个记忆库和俩套结构相同,但是参数更新频率不同的神经网络有效促进学习。采用的神经网络类似于DQN,但是DDPG的神经网络形式比DQN要复杂一点点。
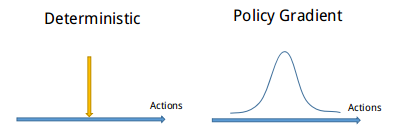
接着是 Deterministic Policy Gradient,如上图所示,相比其他强化学习方法,Policy gradient 能被用来在连续动作上进行动作的筛选,而且筛选的时候是根据所学习到的动作分布随机进行筛选。而Deterministic 改变了输出动作的过程,旨在连续动作上输出一个动作值。
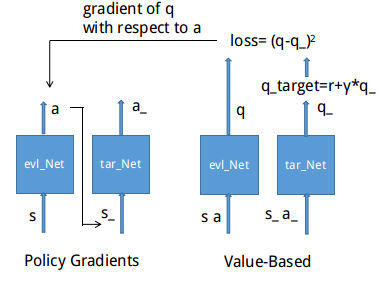
DDPG用到的神经网络是怎么样的?它其实有点类似于Actor-Critic,也需要有基于策略Policy 的神经网络 和 基于价值 Value 的神经网络,但是为了体现DQN的思想,每种神经网络我们都需要再细分成俩个。Policy Gradient 这边有估计网络和现实网络,估计网络用来输出实时的动作,而现实网络则是用来更新价值网络系统的。再看看价值系统这边,我们也有现实网络和估计网络,他们都在输出这个状态的价值,而输入端却有不同,状态现实网络这边会拿着当时actor施加的动作当做输入。在实际运用中,DDPG的这种做法的确带来了更有效的学习过程。
DDPG 的更新公式可从上面得出,关于Actor 部分,他的参数更新会涉及到 Critic, 上面是关于 Actor 参数的更新,它的前半部分 grad[Q] 是从Critic 来的,阐述了Actor 的动作要怎么移动,才能获得更大的 Q。而后半部分 grad[u] 是从Actor来的,阐述了 Actor 要怎么样修改自身参数,才使得Actor 有可能做这个动作,所以俩者阐述了Actor 要朝着更有可能获取Q的方向修改动作参数。
2.代码框架
Actor:
#Building network, same architecture but with different parameters
def _build_net(self, s, scope, trainable):
with tf.variable_scope(scope):
init_w = tf.contrib.layers.xavier_initializer()
init_b = tf.constant_initializer(0.001)
net = tf.layers.dense(s, 100, activation=tf.nn.relu,
kernel_initializer=init_w, bias_initializer=init_b, name='l1',
trainable=trainable)
net = tf.layers.dense(net, 20, activation=tf.nn.relu,
kernel_initializer=init_w, bias_initializer=init_b, name='l2',
trainable=trainable)
with tf.variable_scope('a'):
actions = tf.layers.dense(net, self.a_dim, activation=tf.nn.tanh, kernel_initializer=init_w,
name='a', trainable=trainable) #action [-1,1]
scaled_a = tf.multiply(actions, self.action_bound, name='scaled_a') # Scale output to -action_bound to action_bound
return scaled_a
def learn(self, s): # batch update
self.sess.run(self.train_op, feed_dict={S: s})
if self.t_replace_counter % self.t_replace_iter == 0:
self.sess.run([tf.assign(t, e) for t, e in zip(self.t_params, self.e_params)]) #Assign the latter value to the former value
self.t_replace_counter += 1
def choose_action(self, s): # after trained
s = s[np.newaxis, :] # single state np.newaxis:[1,2,3,4,5]->[[1,2,3,4,5]]
return self.sess.run(self.a, feed_dict={S: s})[0] # single action
def add_grad_to_graph(self, a_grads): #gradient
with tf.variable_scope('policy_grads'):
self.policy_grads = tf.gradients(ys=self.a, xs=self.e_params, grad_ys=a_grads)
with tf.variable_scope('A_train'):
opt = tf.train.RMSPropOptimizer(-self.lr) # (- learning rate) for ascent policy
self.train_op = opt.apply_gradients(zip(self.policy_grads, self.e_params))
Critic:
class Critic(object):
def __init__(self, sess, state_dim, action_dim, learning_rate, gamma, t_replace_iter, a, a_):
self.sess = sess
self.s_dim = state_dim
self.a_dim = action_dim
self.lr = learning_rate
self.gamma = gamma
self.t_replace_iter = t_replace_iter
self.t_replace_counter = 0
with tf.variable_scope('Critic'):
# Input (s, a), output q
self.a = a
self.q = self._build_net(S, self.a, 'eval_net', trainable=True)
# Input (s_, a_), output q_ for q_target
self.q_ = self._build_net(S_, a_, 'target_net', trainable=False) # target_q is based on a_ from Actor's target_net
self.e_params = tf.get_collection(tf.GraphKeys.GLOBAL_VARIABLES, scope='Critic/eval_net')
self.t_params = tf.get_collection(tf.GraphKeys.GLOBAL_VARIABLES, scope='Critic/target_net')
with tf.variable_scope('target_q'):
self.target_q = R + self.gamma * self.q_ #real value, which is treated as ground trurh
with tf.variable_scope('TD_error'):
self.loss = tf.reduce_mean(tf.squared_difference(self.target_q, self.q))
with tf.variable_scope('C_train'):
self.train_op = tf.train.RMSPropOptimizer(self.lr).minimize(self.loss)
with tf.variable_scope('a_grad'):
self.a_grads = tf.gradients(self.q, a)[0]其实总的思路是为:
1. 始化机器人所处的位置s,通过DEEP模块(使用神经网络)输出动作a,由于有了动作a,我们自然可以根据环境预测状态s_, 而通过状态s_, 我们再一次可以得到a_
2.得到状态s, s_, a, a_ 后,在Deterministic Policy Gradient模块中,我们可以计算出q 和 q_, 然后我们可以通过公式得到q真实值
, 通过代价函数
, 其中从q = tf.layers.dense(net, 1, kernel_initializer=init_w, bias_initializer=init_b, trainable=trainable) 可以看出,q的维度为1。
3.通过代价函数以及反向传播,可以得到q对a的导数即a_grads,紧接着通过链式法则,可以求出a对DEEP模块中神经网络参数的梯度,并进行参数更新。而对于target_net 中的网络,并非实时更新,而是通过一定频率的从 evl_net 中拷贝参数给 target_net 。
整个过程基本上就是这个样子,但是至于怎么跟环境交互。个人觉得这个是比较难的。
三. Asynchronous Advantage Actor-Critic (A3C)
1. 基本概念
A3C 其实采用了Actor-Critic 的形式,但是引入了并行计算的概念。为了训练一对Actor 和 Critic,我们将Actor 和 Critic 复制成多份,然后放在不同的核中进行训练。其中需要声明一个主要的Actor-Critic (global),不断从多个副本中更新的参数进行学习,获得新的参数,同时副本中的参数也不断从 Actor-Critic (global) 中获得并更新。
A3C 是Google DeepMind 提出的一种解决 Actor Critic 不收敛问题的算法。A3C会创建多个并行的环境,让多个拥有副结构的 agent 同时在这些并行环境上更新主结构中的参数。并行中的 agent 们互不干扰,而主结构的参数更新受到副结构提交更新的不连续性干扰,所以更新的相关性被降低,收敛性提高。
2. 伪代码(pseudocode)

3. 代码结构(pseudocode)
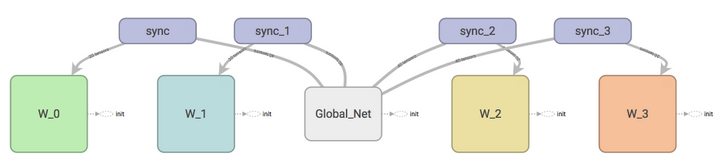
为了实现A3C, 我们要有俩套体系,可以看做中央大脑拥有global net 和它的参数,每位玩家有一个 global net 的副本 local net,可以定时向global net 推送更新,然后定时从global net获得综合版的更新,如下所示:
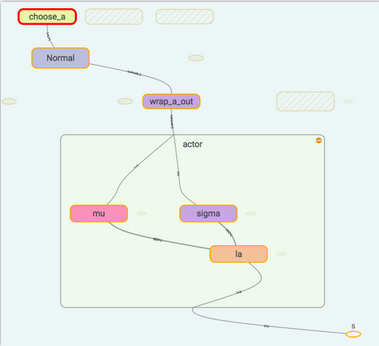
在 [莫凡PYTHON A3C](https://morvanzhou.github.io/tutorials/machine-learning/reinforcement-learning/6-3-A3C /)使用了Normal distribution 来选择动作,所以在搭建神经网络的时候,actor 要输出动作的均值和方差,然后放入Normal distribution 来选择动作。计算actorloss 的时候我们还需要使用到critic 提供的TD_error 作为gradient ascent 的导向。
Critic 比较简单,只需要得到他对于state的价值就行了,用于计算TD_error