深度相机内参和红外相机是一样的。今天来学习一下如何通过kinect的API求得内参。
代码:
#include "kinect.h"
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/opencv.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <fstream>
using namespace cv;
using namespace std;
// 安全释放指针
template<class Interface>
inline void SafeRelease(Interface *& pInterfaceToRelease)
{
if (pInterfaceToRelease != NULL)
{
pInterfaceToRelease->Release();
pInterfaceToRelease = NULL;
}
}
int main() {
int flag = 1;
// 获取Kinect设备
IKinectSensor* m_pKinectSensor;
// 映射器
ICoordinateMapper* m_pCoordinateMapper = NULL;
HRESULT hr;
hr = GetDefaultKinectSensor(&m_pKinectSensor);
if (FAILED(hr) )
{
return hr;
}
IMultiSourceFrameReader* m_pMultiFrameReader = NULL;
if (m_pKinectSensor)
{
hr = m_pKinectSensor->Open();
if (SUCCEEDED(hr))
{
// 获取多数据源到读取器
hr = m_pKinectSensor->OpenMultiSourceFrameReader(
FrameSourceTypes::FrameSourceTypes_Color |
FrameSourceTypes::FrameSourceTypes_Infrared |
FrameSourceTypes::FrameSourceTypes_Depth,
&m_pMultiFrameReader);
}
}
if (!m_pKinectSensor || FAILED(hr))
{
return E_FAIL;
}
// 三个数据帧及引用
IInfraredFrame* m_pInfraredFrame = NULL;
IDepthFrame* m_pDepthFrame = NULL;
IColorFrame* m_pColorFrame = NULL;
CameraIntrinsics* m_pCameraIntrinsics = new CameraIntrinsics();
hr = m_pKinectSensor->get_CoordinateMapper(&m_pCoordinateMapper);
if (FAILED(hr))
{
return hr;
}
//得到内参
while (flag==1) {
//获取深度相机内参(要好几千帧照片才能得到,否则数据全部为0)
m_pCoordinateMapper->GetDepthCameraIntrinsics(m_pCameraIntrinsics);//GetDepthCameraIntrinsics:获得ir相机参数(出厂已写入设备)
if (m_pCameraIntrinsics->FocalLengthX && flag ==1)
{
// 打印
cout << "FocalLengthX : " << m_pCameraIntrinsics->FocalLengthX << endl; //摄像机的X焦距,以像素为单位
cout << "FocalLengthY : " << m_pCameraIntrinsics->FocalLengthY << endl; //相机的Y焦距,以像素为单位
cout << "PrincipalPointX : " << m_pCameraIntrinsics->PrincipalPointX << endl;//相机在X维中的主要点,以像素为单位。
cout << "PrincipalPointY : " << m_pCameraIntrinsics->PrincipalPointY << endl; //相机在Y轴上的主要点,以像素为单位。
cout << "RadialDistortionFourthOrder : " << m_pCameraIntrinsics->RadialDistortionFourthOrder << endl;//相机的四阶径向畸变参数。
cout << "RadialDistortionSecondOrder : " << m_pCameraIntrinsics->RadialDistortionSecondOrder << endl;//相机的二阶径向畸变参数。
cout << "RadialDistortionSixthOrder : " << m_pCameraIntrinsics->RadialDistortionSixthOrder << endl;//摄像机的六阶径向畸变参数。
flag = 0;
}
}
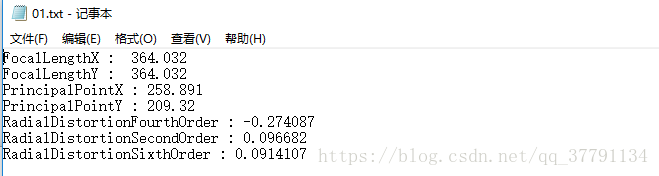
//保存到01.txt文本
ofstream fout("01.txt"); ////以输出方式打开文件 如果想以输入/输出方式来打开,就用fstream来定义
fout << "FocalLengthX : " << m_pCameraIntrinsics->FocalLengthX <<endl; //向文件写入数据
fout << "FocalLengthY : " << m_pCameraIntrinsics->FocalLengthY << endl; //向文件写入数据
fout << "PrincipalPointX : " << m_pCameraIntrinsics->PrincipalPointX << endl;//相机在X维中的主要点,以像素为单位。
fout << "PrincipalPointY : " << m_pCameraIntrinsics->PrincipalPointY << endl; //相机在Y轴上的主要点,以像素为单位。
fout << "RadialDistortionFourthOrder : " << m_pCameraIntrinsics->RadialDistortionFourthOrder << endl;//相机的四阶径向畸变参数。
fout << "RadialDistortionSecondOrder : " << m_pCameraIntrinsics->RadialDistortionSecondOrder << endl;//相机的二阶径向畸变参数。
fout << "RadialDistortionSixthOrder : " << m_pCameraIntrinsics->RadialDistortionSixthOrder << endl;//摄像机的六阶径向畸变参数。
// 关闭窗口,设备
cv::destroyAllWindows();
m_pKinectSensor->Close();
SafeRelease(m_pCoordinateMapper); // 安全释放指针
SafeRelease(m_pKinectSensor);// 安全释放指针
return 0;
}
API介绍:
https://docs.microsoft.com/en-us/previous-versions/windows/kinect/dn785315(v=ieb.10)
版权声明:本文为博主原创文章,未经博主允许不得转载。https://blog.csdn.net/qq_37791134