https://blog.csdn.net/yoouzx/article/details/53414400?utm_source=itdadao&utm_medium=referral
https://blog.csdn.net/weixin_37667519/article/details/79616637
https://github.com/ethz-asl/rovio
https://github.com/ethz-asl/kindr
1. 新建catkinworkspace
mkdir -p ~/catkin_vio/src
cd ~/catkin_vio
catkin_make- 1
- 2
- 3
2 . 安装依赖项
sudo apt-get install freeglut3-dev
sudo apt-get install libglew-dev- 1
- 2
3 . 安装kindr
github上下载kindr,在opt目录下解压安装
- 安装依赖项
sudo add-apt-repository ppa:ethz-asl/common
sudo apt-get update
sudo apt-get install ros-indigo-kindr-*- 1
- 2
- 3
4 . 进入/opt/kindr目录,安装
mkdir build
cd build
cmake ..
sudo make install- 1
- 2
- 3
- 4
5 . 安装rovio
进入新建的catkin_vio/src下
git clone https://github.com/ethz-asl/rovio- 1
进入rovio目录下,下载
git submodule update --init --recursiv- 1
退出到catkin_vio下。运行
catkin_make rovio --cmake-args -DCMAKE_BUILD_TYPE=Release -DMAKE_SCENE=ON
catkin_make- 1
- 2
若提示找不到一个S开头的头文件,在rovio/Cmakelist 中最后加上 add_dependencies(rovio rovio_gencpp)
6 . 运行数据集
- 下载数据集(rosbag格式,链接: https://pan.baidu.com/s/1skSOcZb 密码: 5i63),放到rovio目录下,并在rovio目录下新建一个rovio目录。
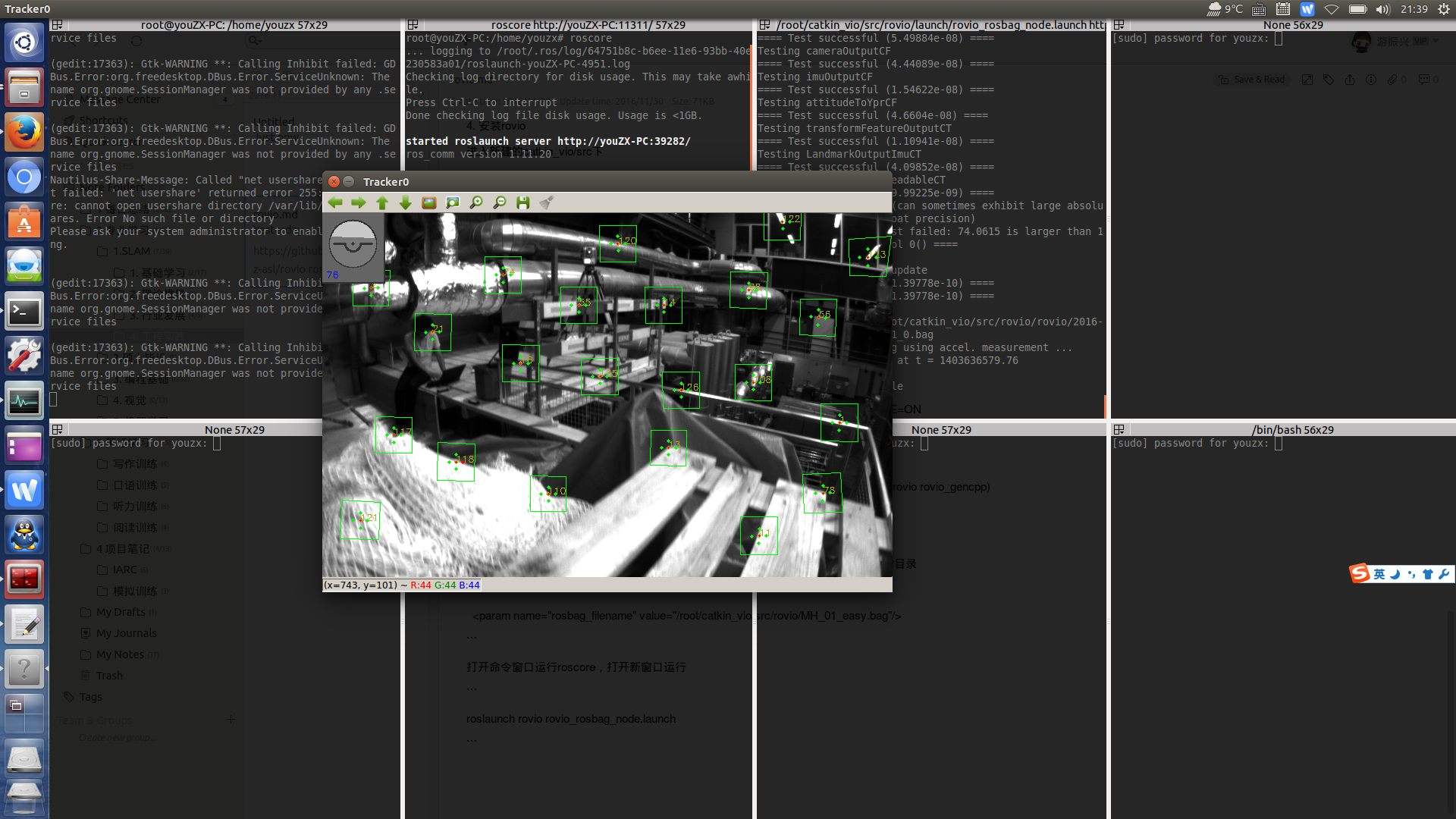
- 修改rovio/launch/rovio_rosbag_node.launch中的filename参数,将其改为实际rosbag的目录
<param name="rosbag_filename" value="/root/catkin_vio/src/rovio/MH_01_easy.bag"/>- 1
打开命令窗口运行roscore
roscore- 1
打开新窗口,进入catkin_vio工作空间运行
source devel/setup.bash
roslaunch rovio rovio_rosbag_node.launch - 1
- 2