Canny边缘检测是一种使用【多阶段】边缘检测算法检测边缘的方法。
主要分为以下步骤:
1. 去噪:
过滤噪声,使用滤波平滑一些纹理较弱的非边缘区域。
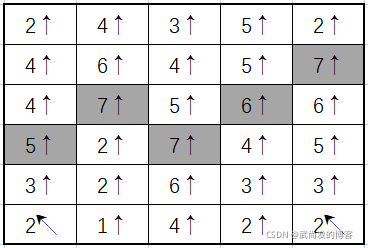
2. 计算梯度:
计算梯度的幅度与角度(PS: 2↑ 表示幅度为2,角度90°),值得注意的是,边缘和梯度始终是垂直的。

3. 非极大值抑制:
依次遍历像素点,判断当前像素点是否为周围梯度方向内的最大值。如果是最大值则保留,否则抑制(归零)。
4. 使用双阈值确定边缘:
剔除虚边缘,确定真正的边缘。

经过前面的步骤,我们已经得到了一些边缘,但是这些边缘中除了真正的边缘外,还有一些噪声边缘,所以我们需要进一步剔除。主要分3种情况:
大于等于 maxVal 的强边缘 : 保留
大于 minVal 并且小于 maxVal 的虚边缘 :如果与强边缘连通则保留,否则抑制。
小于 minVal 的边缘:抑制
上代码:
Canny(img,minVal,maxVal)
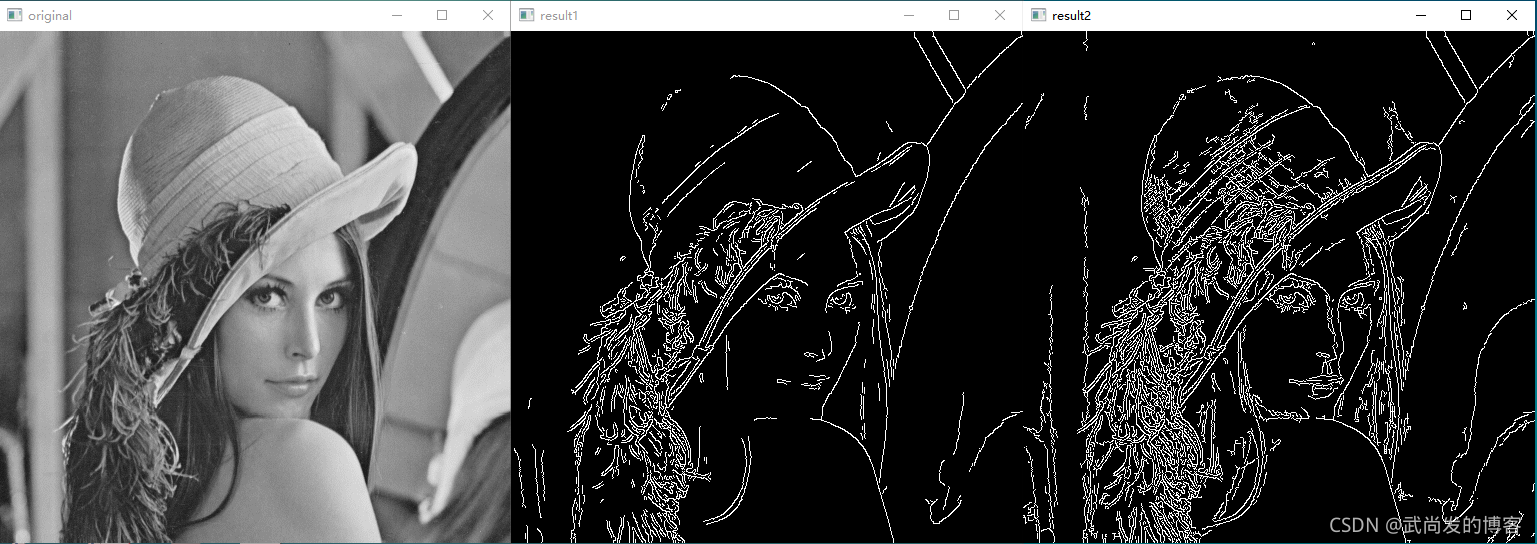
import cv2
o=cv2.imread("lena.bmp",cv2.IMREAD_GRAYSCALE)
r1=cv2.Canny(o,128,200)
r2=cv2.Canny(o,32,128)
cv2.imshow("original",o)
cv2.imshow("result1",r1)
cv2.imshow("result2",r2)
cv2.waitKey()
cv2.destroyAllWindows()
结果:
拜了个拜。。。。