一、三角定位算法
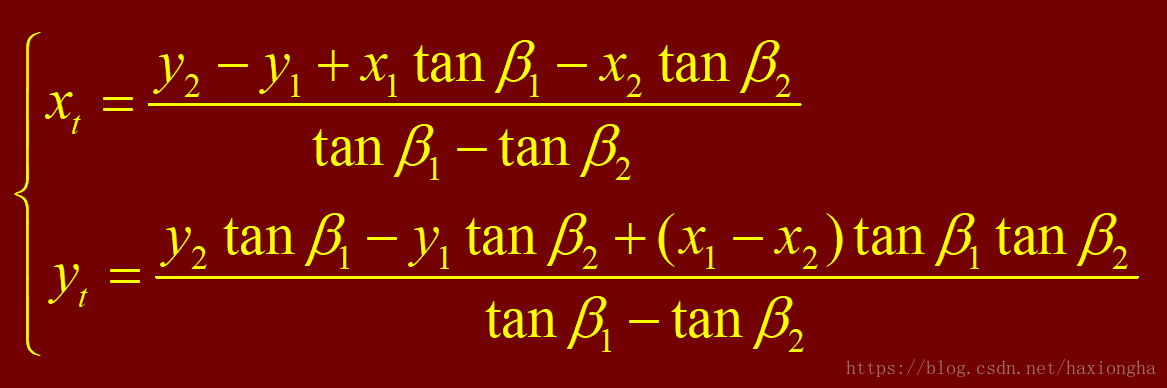
1、二维目标定位算法
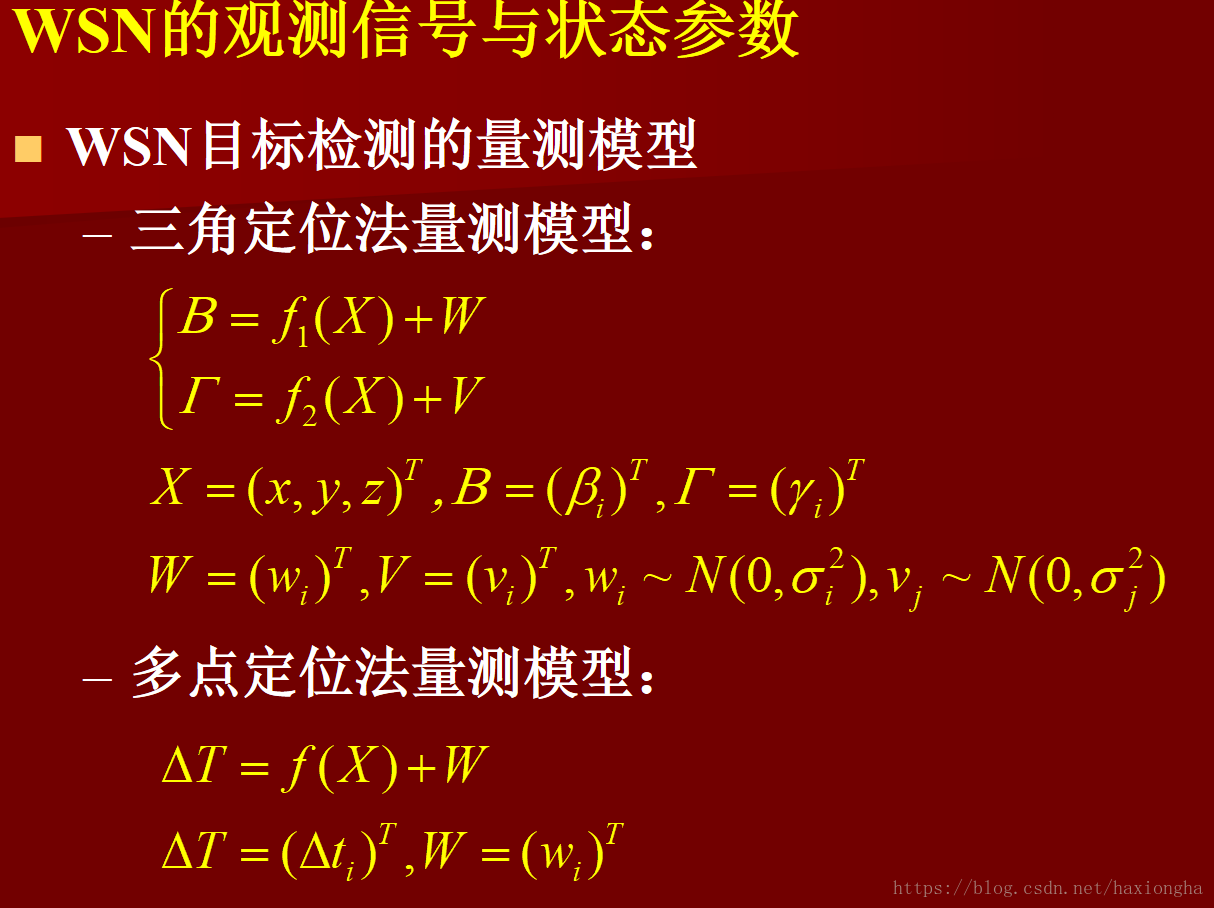
传感器观测信号(量测)是方位角β1,β2,为融合处理的状态参数是特定目标的位置
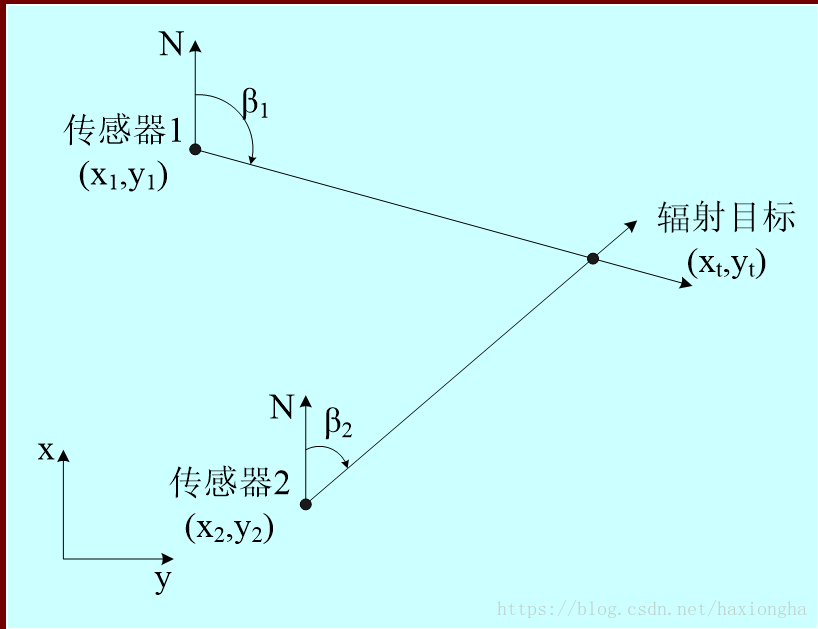
目标点计算公式为:
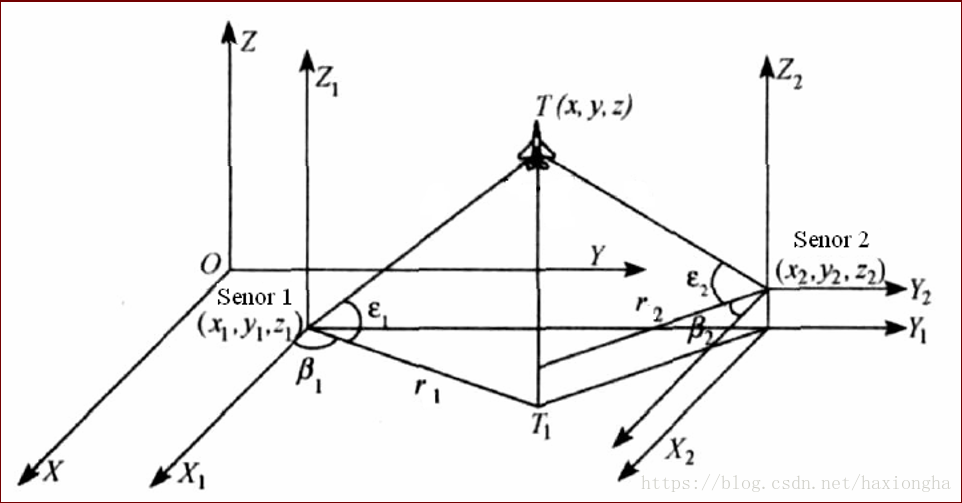
2、三维目标定位算法
传感器观测信号是方位角βi ,俯仰角;为融合处理的状态参数是特定目标的位置;
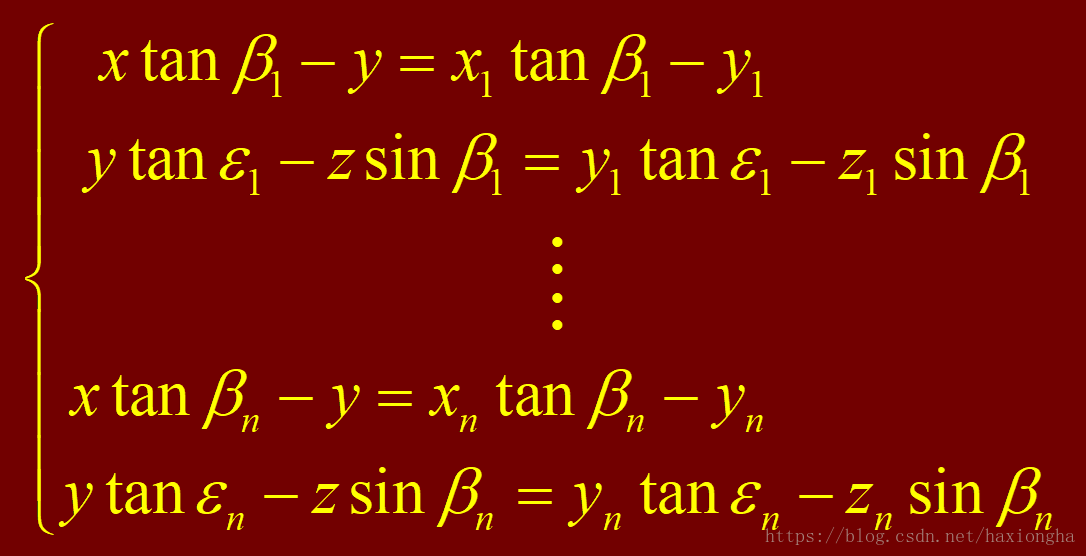
目标点计算公式为:
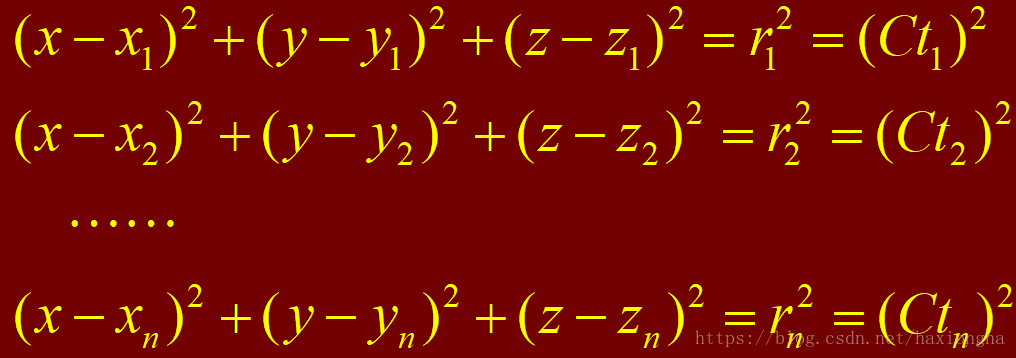
二、多点定位算法
传感器观测信号是到达时间ti,或到达时间差Δti;为融合处理的状态参数是特定目标的位置。
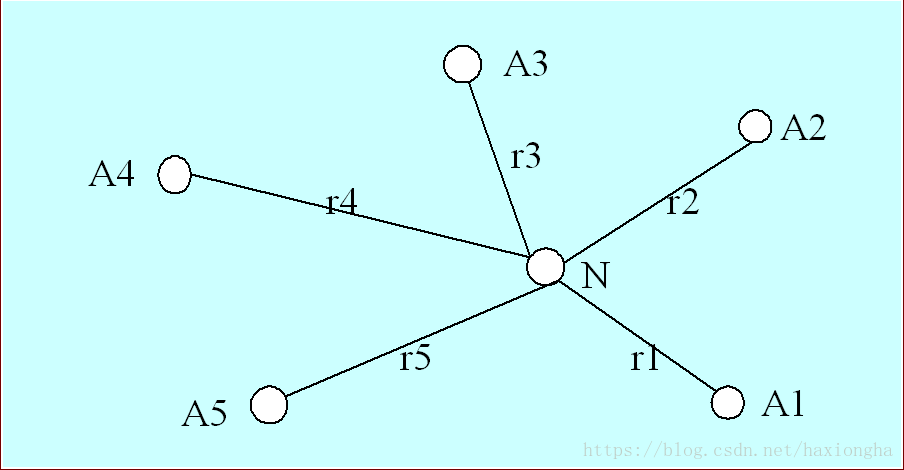
目标点计算公式:
1、二维目标定位算法
传感器观测信号(量测)是方位角β1,β2,为融合处理的状态参数是特定目标的位置
目标点计算公式为:
2、三维目标定位算法
传感器观测信号是方位角βi ,俯仰角;为融合处理的状态参数是特定目标的位置;
目标点计算公式为:
传感器观测信号是到达时间ti,或到达时间差Δti;为融合处理的状态参数是特定目标的位置。
目标点计算公式: