技术要求描述:
明虾放在透明传送带上(虾在传送带上以间距至少一分米任意位置任意角度摆放),传送带有时不太干净,要提高识别精度和速度,去除周围杂质。明虾随着透明传送带到达末端指定位置时(该位置底部有光源照射),传送带停止运转,图像识别系统开始识别虾体,其中每个虾间距至少一分米,摄像头中会出现1到3只虾,(主要识别虾头和虾尾的交界处)并将识别出的角度及交界点相关信息(一只虾只能识别并得出唯一的一个角度和一个交界信息或则你得出多解但经过优化筛选得出唯一的数据)以某种形式发送给四自由度工业机器人系统(采用四自由度工业机器人,且机器人末端有个比虾略大的长方形吸盘(吸盘可以吸的面积是80mm*80mm ),用来吸取虾,并将虾放置于某个位置(一定要使吸盘的大致的中心位置吸虾背的交界点,不能吸虾的肚子和爪子的位置)。其中吸取虾的时候,吸盘要转动一定角度,使吸盘的长度方向要和虾的长度方向保持一致,这样才能稳定的吸取虾并将虾以一定的位置摆放于某个固定角度的位置(使虾摆放成一排并成相同的角度且虾头朝向一致)。

图1 现场实际工况
首先通过自动阈值分割与形态学结合,实现虾体的准确分割。


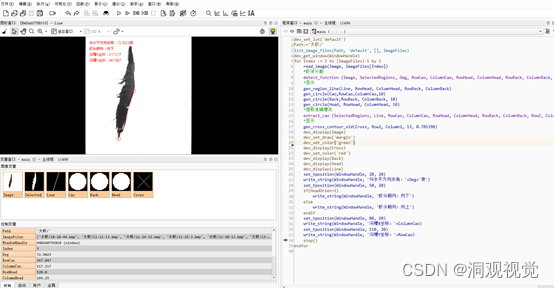
图2 原图与分割后图像
通过封装的核心算法实现虾体方向、虾头朝向和位置的检测。
此外,附带373张基于背光源拍摄的现场实际检测bmp原图。

可前往微信公众号【洞观科研】获取算法源码和图库的网盘下载链接,也可单独获取图库的下载连接。