执行边缘检测的三个基本步骤:
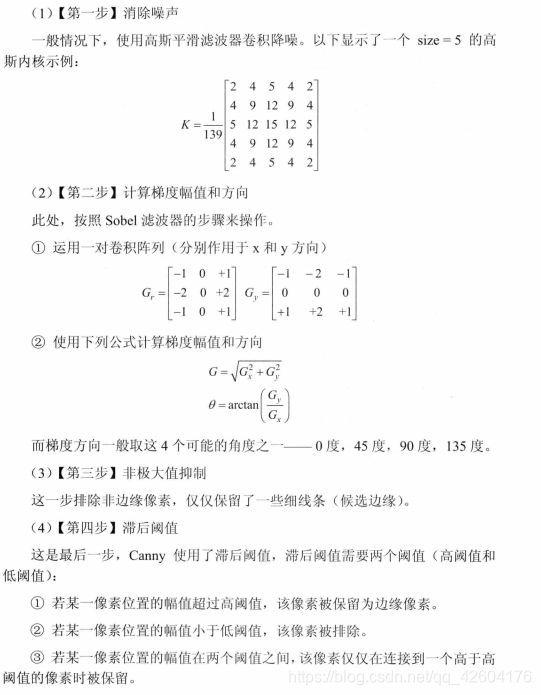
1、为降噪对图像进行平滑处理。(导数对噪声具有敏感性。图像的正负分量检测困难)
2、边缘点的检测。(提取边缘点的潜在候选者)
3、边缘定位。(从候选者中选出真是边缘点成员)
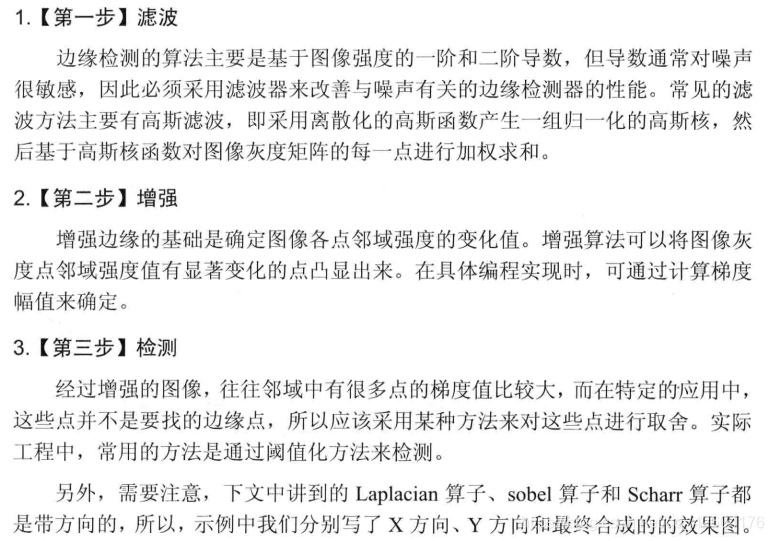
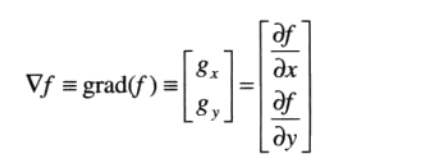
基本算子:梯度算子(表征某点边缘强度和方向,又称边缘检测子)

较为简单的边缘检测算子模板:
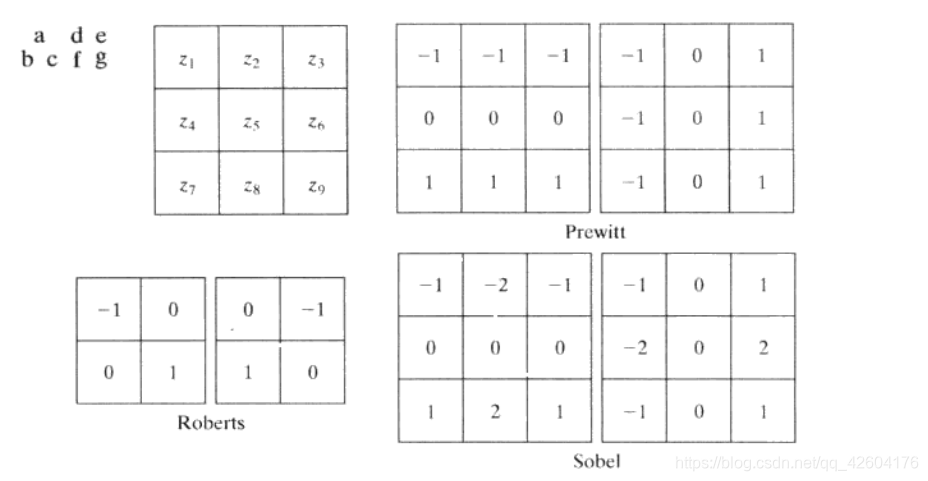
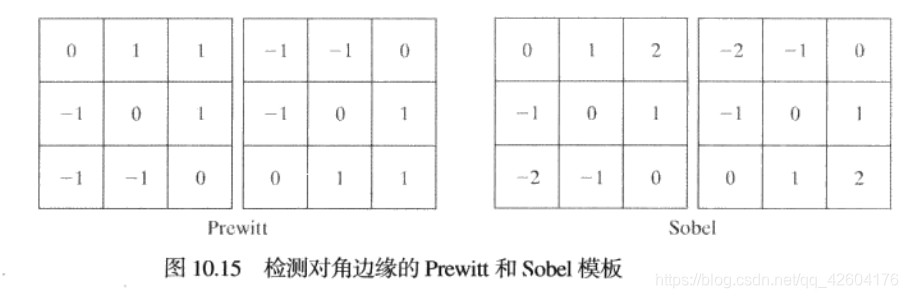
sobel模板能较好地抑制噪声。
常用绝对值来近似梯度幅值,保持灰度级的相对变化,代价是导致滤波器不再是各向同性的。
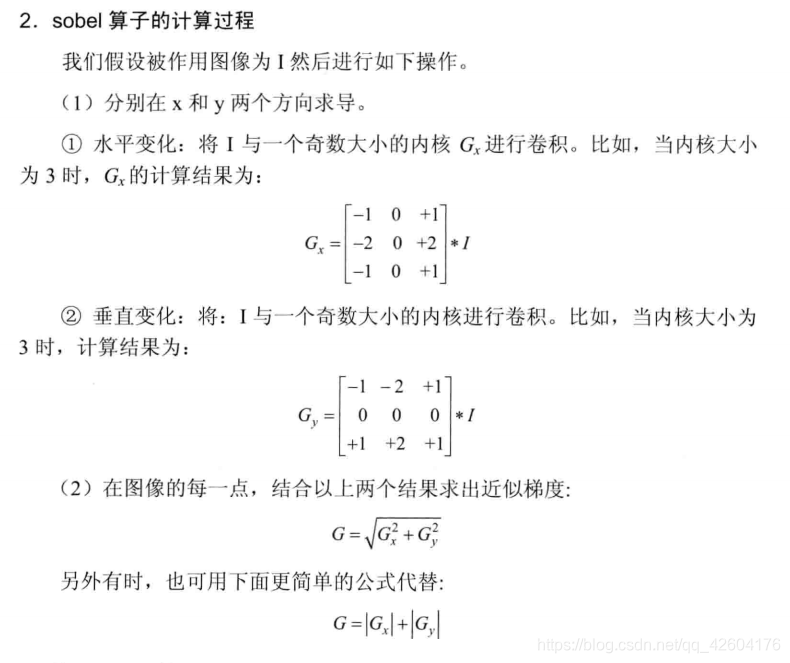
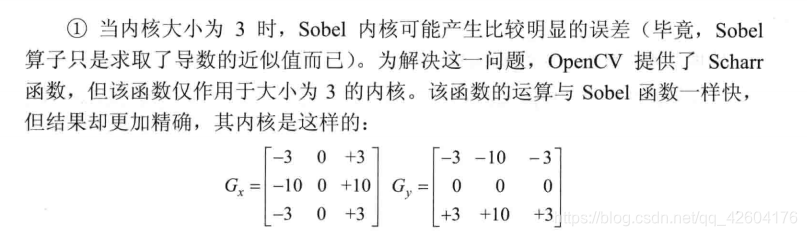
sobel计算过程
Opencv库函数调用方法:
void Sobel (
InputArray src,
OutputArray dst,
int ddepth,
int dx, x方向上的差分阶数
int dy, y方向上的差分阶数
int ksize=3, 核的大小,为奇数
double scale=1, 计算导数时的缩放因子
double delta=0, 将结果存入目标图像前可选的值
int borderType=BORDER_DEFAULT ) ;
int main()
{
// Read image 读取图像
SetConsoleTextAttribute(GetStdHandle(STD_OUTPUT_HANDLE), FOREGROUND_INTENSITY | FOREGROUND_GREEN); //字体为绿色
//载入原图
Mat srcImage = imread("D:\\opencv_picture_test\\形态学操作\\coin_inv.png",0); //读取灰度图
//判断图像是否加载成功
if (srcImage.empty())
{
cout << "图像加载失败!" << endl;
return -1;
}
else
cout << "图像加载成功!" << endl << endl;
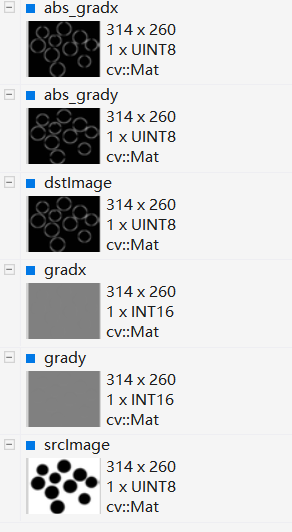
Mat gradx, grady;
Mat abs_gradx, abs_grady;
Mat dstImage;
//求x方向的梯度
Sobel(srcImage,gradx,CV_16S,1,0,3,1,1,BORDER_DEFAULT);// x方向1阶差分 y方向0 核大小3
convertScaleAbs(gradx, abs_gradx); //绝对值
//求y方向的梯度
Sobel(srcImage, grady, CV_16S, 0, 1, 3, 1, 1, BORDER_DEFAULT);// x方向1阶差分 y方向0 核大小3
convertScaleAbs(grady, abs_grady); //绝对值
addWeighted(abs_gradx,0.5, abs_grady,0.5,0,dstImage);
imshow("srcImage", srcImage);
imshow("x方向", abs_gradx);
imshow("y方向", abs_grady);
imshow("整体", dstImage);
waitKey(0);
return 0;
}
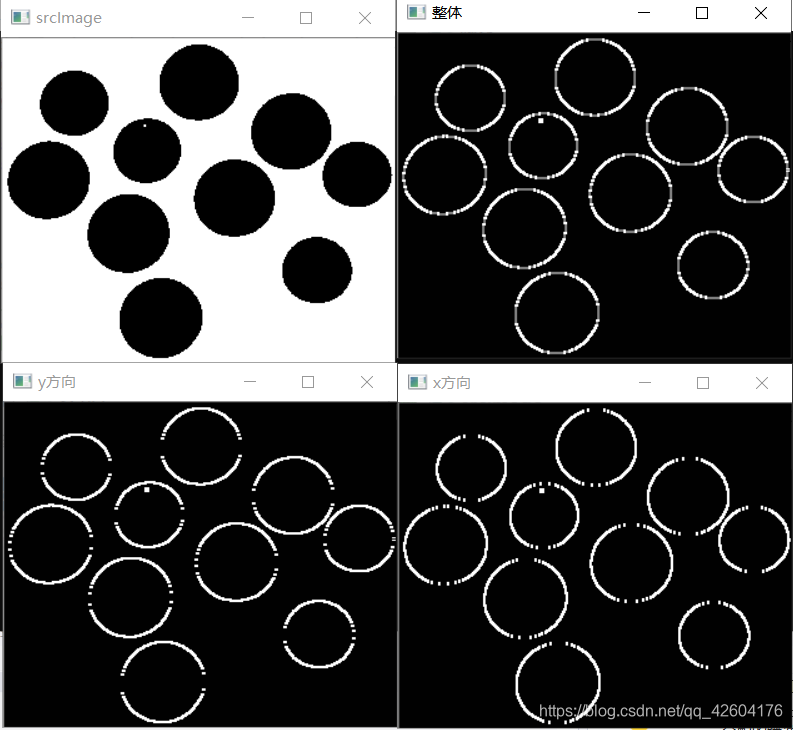
经过ImageWatch放大发现,提取出的边缘比较粗。

减少精密细节的两种方法:
1、对图像进行平滑处理(例如用均值滤波,得到主要边缘)
2、对梯度图像进行阈值处理(梯度幅值大于等于阈值为黑白,小于阈值为黑),不过这一方法容易断线。
当为了突出主要边缘并尽可能维护连续性时,平滑处理和阈值处理两者都要使用。
roberts、prewitt,sobel算子都是以一个或多个模板进行滤波,而未对图像特性和噪声内容采取防护措施。
接下来介绍一种最优的边缘检测方法:canny算子
●低错误率:标识出尽可能多的实际边缘,同时尽可能地减少噪声产生的误报。
●高定位性:标识出的边缘要与图像中的实际边缘尽可能接近。
●最小响应:图像中的边缘只能标识-一次,并且可能存在的图像噪声不应标
识为边缘。
canny算子计算过程
Opencv库函数调用方法:
void Canny (InputArray image , OutputArray edges, double threshold1,
double threshold2 , 两个阈值较小的用于边缘连接,较大的用于控制强边缘的初始端,一般比例控制在3:1或者2:1
int apertureSize=3, sobel核大小
bool L2gradient=false )
int main()
{
// Read image 读取图像
SetConsoleTextAttribute(GetStdHandle(STD_OUTPUT_HANDLE), FOREGROUND_INTENSITY | FOREGROUND_GREEN); //字体为绿色
//载入原图
Mat srcImage = imread("D:\\opencv_picture_test\\形态学操作\\coin_inv.png",0); //读取灰度图
//判断图像是否加载成功
if (srcImage.empty())
{
cout << "图像加载失败!" << endl;
return -1;
}
else
cout << "图像加载成功!" << endl << endl;
Mat dstImage;
Canny(srcImage,dstImage,100,33,3,false);
imshow("srcImage", srcImage);
imshow("整体", dstImage);
waitKey(0);
return 0;
}
效果:
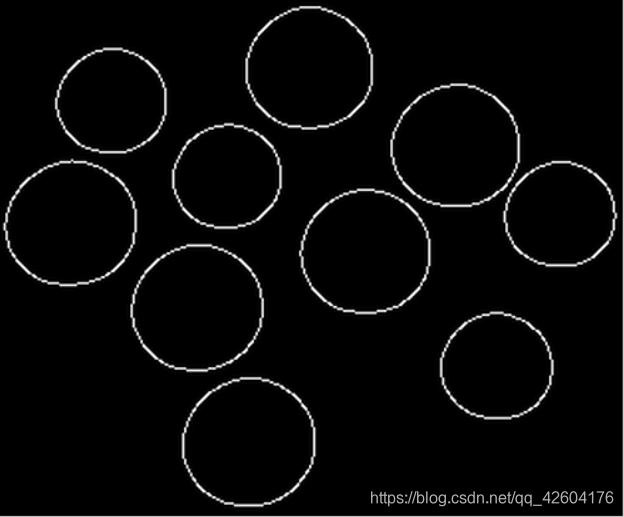
经过ImageWatch放大,可以发现,边缘只有一格
总的看来,canny算子确实具有优越性。
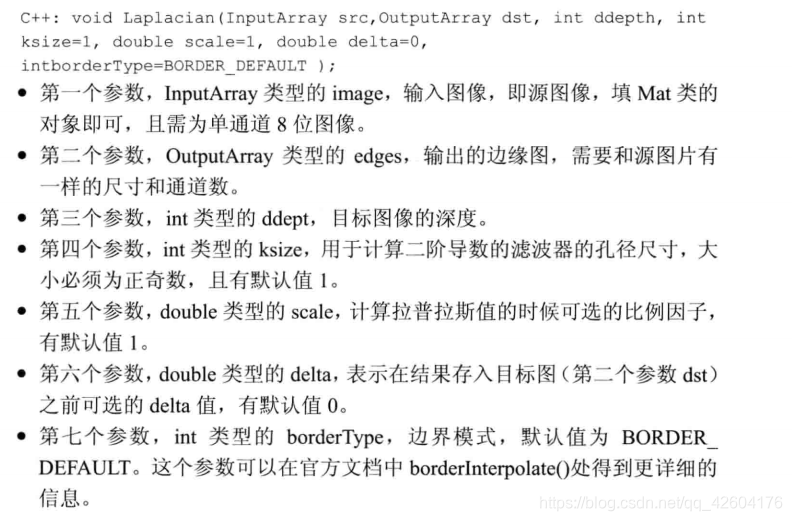
laplace计算过程

3*3孔径的模板:

opencv库函数调用:
int main()
{
// Read image 读取图像
SetConsoleTextAttribute(GetStdHandle(STD_OUTPUT_HANDLE), FOREGROUND_INTENSITY | FOREGROUND_GREEN); //字体为绿色
//载入原图
Mat srcImage = imread("D:\\opencv_picture_test\\形态学操作\\coin_inv.png", 0); //读取灰度图
//判断图像是否加载成功
if (srcImage.empty())
{
cout << "图像加载失败!" << endl;
return -1;
}
else
cout << "图像加载成功!" << endl << endl;
Mat dstImage,abs_dst;
GaussianBlur(srcImage,srcImage,Size(3,3),0); //高斯模糊
Laplacian(srcImage,dstImage,CV_16S,3,1,0);
convertScaleAbs(dstImage, abs_dst);
imshow("srcImage", srcImage);
imshow("整体", dstImage);
waitKey(0);
return 0;
}