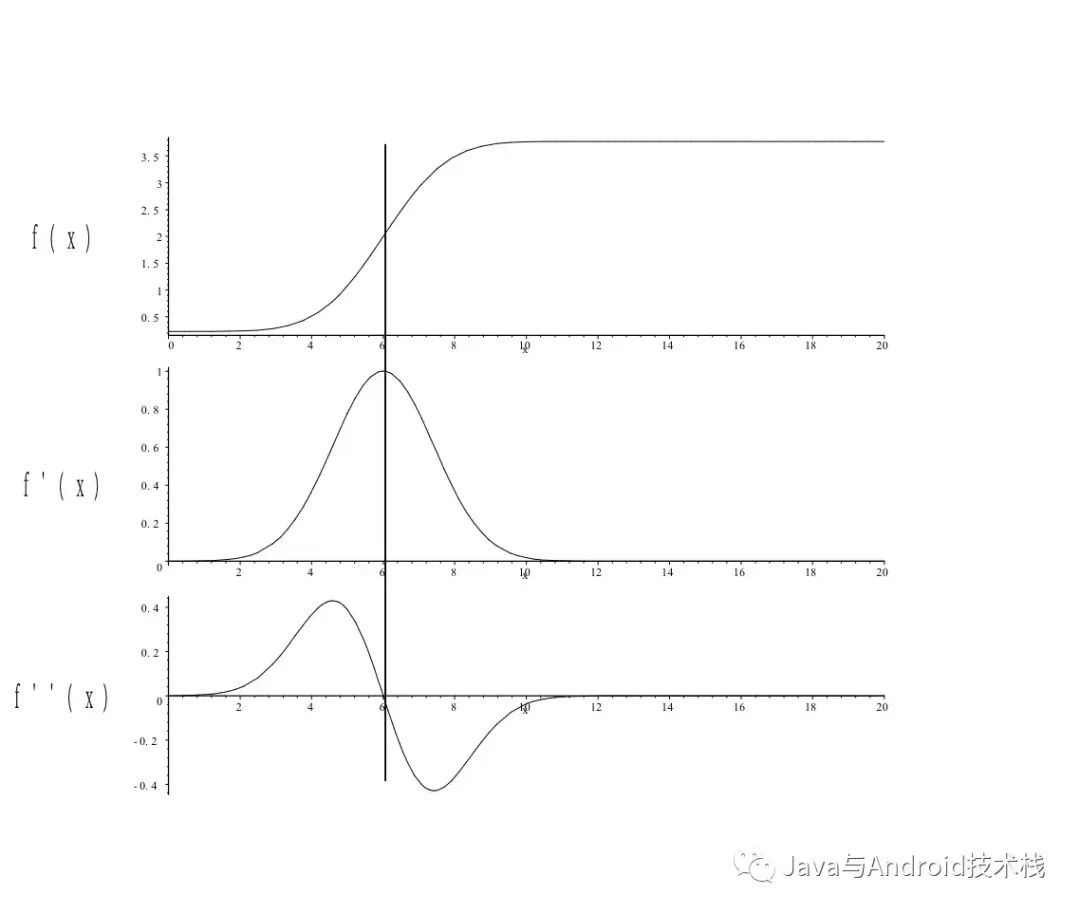
在该系列的第八篇文章中,我们曾介绍过一阶导数和二阶导数对分析边缘的结论:
一阶导数通常在图像中产生较粗的边缘;
二阶导数对精细细节,如细线、孤立点和噪声有较强的响应;
二阶导数在灰度斜坡和灰度台阶过渡处会产生双边缘响应;
二阶导数的符号可用于确定边缘的过渡是从亮到暗还是从暗到亮。
一阶导数算子(例如 Sobel 算子)通过对图像求导来确定图像的边缘,数值绝对值较高的点对应了图像的边缘。如果继续求二阶导,原先数值绝对值较高的点对应了过零点。因此,也可以通过找到二阶导数的过零点来检测边缘。在某些情况下,找二阶导数的过零点可能更容易。
Part11. Laplace 算子
之前我们曾介绍过二阶导数的 Laplace 算子可以通过差分近似来简化,其公式为
它的卷积核:
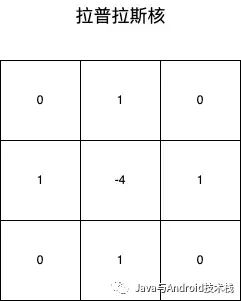
这是它的 4 邻域卷积核。
11.1 Laplace 算子的扩展
Laplace 算子是具有旋转不变性的各向同性的算子。
将 4 邻域的 Laplace 算子旋转 45° 后,与原算子相加,就可以得到 8 邻域的算子。
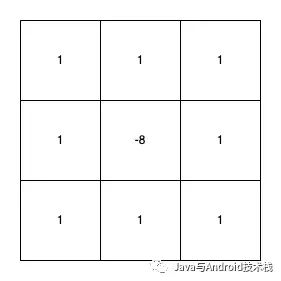
这是它的 8 邻域卷积核。这个算子表示一个像素周围一圈 8 个像素的和与中间像素 8 倍的差,作为拉普拉斯计算结果。
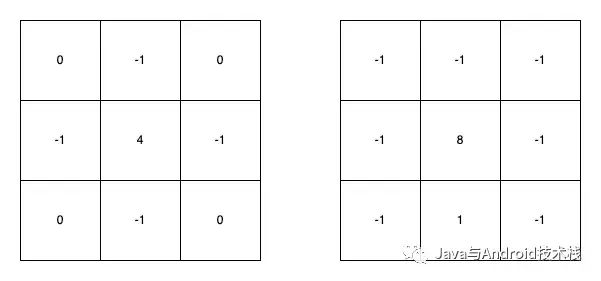
另外,还有两个拉普拉斯卷积核,分别是对 4 邻域卷积核和 8 邻域卷积核取反。
21.2 图像的模糊检测
使用拉普拉斯变换对图像进行模糊检测的步骤大致如下:
对图像进行拉普拉斯变换,检测水平和垂直边缘
然后对拉普拉斯变换后输出的图像求方差
如果图像足够清晰,输出图像的方差会大于给定阈值
如果图像相对模糊,则拉普拉斯变换在图像中并不能检测到足够的细节,边缘就越少,从而导致输出图像的方差小于给定阈值
该过程需要选择合适的阈值。
拉普拉斯算子能突出显示图像中包含快速梯度变化的区域,这些区域往往与边缘有关。因此,如果一幅图像的方差较高,说明图像中存在广泛的边缘响应,包括类边和非类边,这是一幅正常聚焦图像的代表。但如果方差很低,那么表明图像中的边缘响应很小,几乎没有边缘存在。因此,通过比较方差与预设阈值的大小,可以判断图像是否模糊。
按照上面的步骤实现了一个模糊检测的函数:
bool isImageBlurry(const char* inputFile, double threshold)
{
Mat src = imread(inputFile);
if (src.empty()) {
printf("Image not loaded\n");
return false;
}
Mat gray;
cvtColor(src, gray, COLOR_BGR2GRAY);
Mat dst, absDst;
cv::Laplacian(gray, dst, CV_16S, 3);
cv::convertScaleAbs(dst, absDst);
Mat mean, stddev;
double m = 0, sd = 0;
meanStdDev(absDst, mean, stddev);
m = mean.at<double>(0, 0);
sd = stddev.at<double>(0, 0);
double result = sd * sd;
std::cout << "m: " << m << std::endl;
std::cout << "StdDev: " << result << std::endl;
return result <= threshold;
}然后写一个程序来判断一下这张图是否是模糊的

int main(int argc,char *argv[])
{
string fileName = ".../test.jpeg";
bool result = isImageBlurry(fileName.c_str(),11.0);
cout << "result =" << result <<endl;
return 0;
}输出结果:
m: 2.5213
StdDev: 6.31374
result = 1说明是模糊的图片。
Laplace 算子对噪声敏感,通常不适用于存在噪声的图像。
Part22. LoG 算子
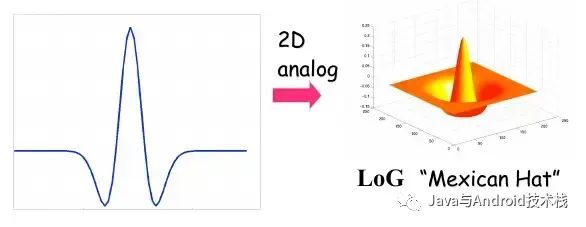
LoG(Laplacian of Gaussian)边缘检测算子是 David Courtnay Marr 和 Ellen Hildreth 在 1980 年共同提出的,也称为 Marr-Hildreth 算子,它根据图像的信噪比来求检测边缘的最优滤波器。该算法先对图像进行高斯平滑处理,然后再与 Laplacian 算子进行卷积。稍后来解释为何是这样的。
先来回顾一下二维高斯函数的公式:
高斯函数的一阶导数和二阶导数,在很多算子中都会用到。例如一阶导数应用在 Canny 算子,二阶导数应用在 LoG 算子等等。
简单推导一下它的一阶导数:
同理:
还有推导一下它的二阶导数:
同理:
将高斯函数代入拉普拉斯算子,可得 LoG 算子:
Marr-Hildreth 算法如下:
首先让 LoG 核与一幅输入图像卷积:
寻找 g(x,y) 的过零点来确定 f(x,y) 的边缘位置。因为拉普拉斯变换和卷积都是线性运算,因此上式可以改成
其中,f(x,y) 是输入图像,g(x,y) 是输出图像。
这样正好解释了之前说的,该算法先对图像进行高斯平滑处理,然后再与 Laplacian 算子进行卷积。因为先使用高斯滤波器对图像进行平滑处理,可以减少噪声和细节,然后使用拉普拉斯算子对滤波后的图像进行边缘检测。
它的优点是可以有效去除噪声,同时保留图像中的真实边缘。相比 Laplace 算子,LoG 算子具有更好的边缘定位能力和抗噪声。但是它也存在一些缺点,计算量相对较大。
下图是负 LoG 算子的三维图像,看上去很像“墨西哥草帽”。所以,在业界也被称为墨西哥草帽小波(Mexican hat wavelet)。

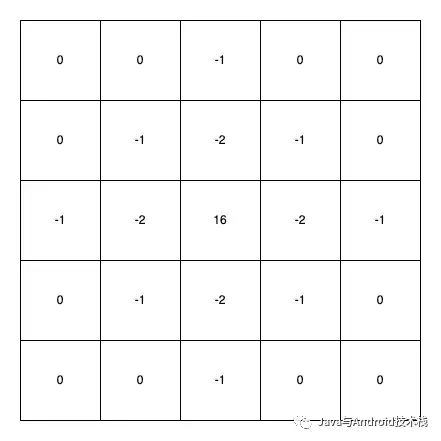
负 LoG 算子可用 5*5 的模版近似表示
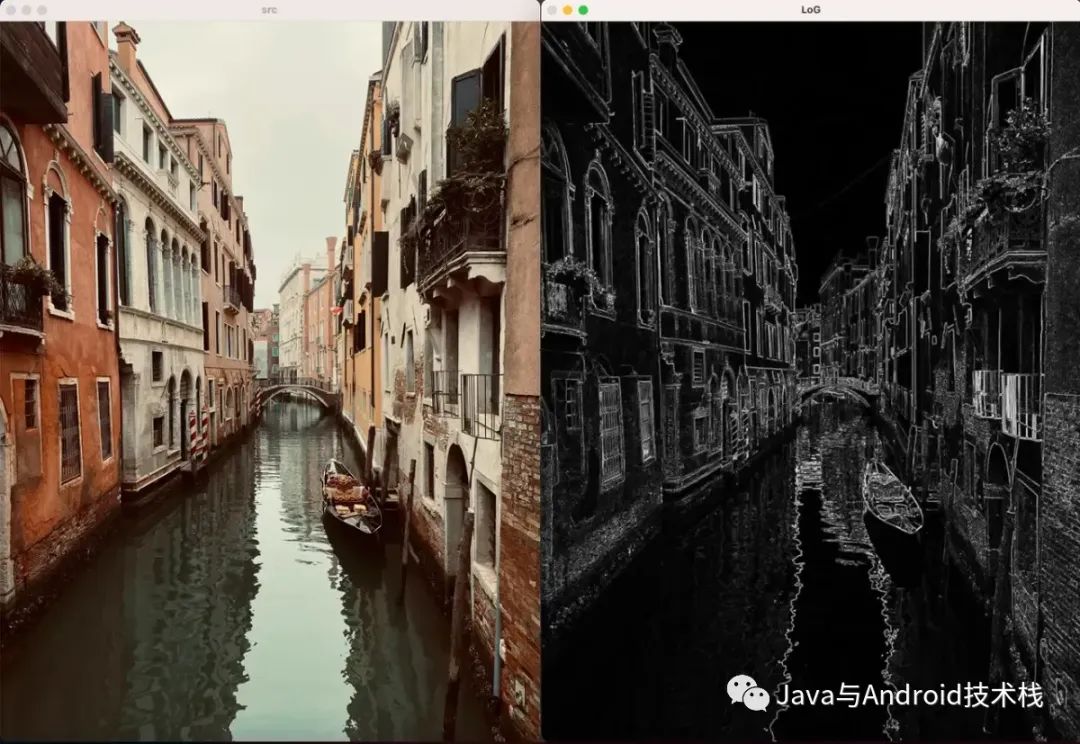
下面用高斯模糊和拉普拉斯变换来实现 LoG :
int main(int argc,char *argv[])
{
Mat src = imread(".../street.jpg");
imshow("src",src);
Mat dst, gray, edge;
cv::GaussianBlur(src, dst, cv::Size(3, 3), 0 ,0); // 高斯模糊 去除噪声
cv::cvtColor(dst, gray, cv::COLOR_BGR2GRAY); // 灰度化
cv::Laplacian(gray, edge, CV_16S, 3); // 使用拉普拉斯算子提取边缘
cv::convertScaleAbs(edge, edge);
imshow("LoG", edge);
waitKey(0);
return 0;
}
Part33. 总结
本文介绍了 Laplace 算子、LoG 算子,它们都是二阶导数的边缘算子。
特别是 LoG 算子在 Laplace 算子的基础上引入了高斯滤波,可以在一定程度上克服噪声的影响。但它仍旧有一定的局限性,不过这种思想的引入对后续图像特征研究起到了积极作用,被很多后续的算法所采纳。
【Java与Android技术栈】公众号
关注 Java/Kotlin 服务端、桌面端 、Android 、机器学习、端侧智能
更多精彩内容请关注: