1 介绍
GreedyProjectionTriangulation 是一种基于局部二维投影的三维点贪婪三角剖分算法的实现。它假定局部表面光滑,不同点密度区域之间的过渡相对平滑。
GreedyProjectionTriangulation算法的基本思想是通过逐步投影点云数据到一个三角化网格上来进行重建。它首先根据给定的搜索半径找到每个点的最近邻点,然后根据这些最近邻点构建局部三角化表面。接下来,通过迭代地添加新的点并更新三角化表面,最终生成完整的三角化网格模型。
GreedyProjectionTriangulation类提供了一系列参数和方法,用于控制和定制三角化过程。一些重要的参数包括搜索半径、最小和最大角度、法向量平滑度等。此外,它还提供了一些方法来设置输入点云数据、执行重建过程并获取生成的三角化网格。
setSearchRadius(double radius):设置搜索半径。该参数定义了在找到最近邻点时所使用的搜索半径。较大的搜索半径可以包含更多的邻近点,但可能导致模型失真。
setMu(double mu):设置最大边长因子。该参数定义了最大边长与搜索半径之间的比例关系。较小的mu值会导致生成更多的小三角形,而较大的mu值会生成较大的三角形。
setMaximumNearestNeighbors(int num):设置最大最近邻点数目。该参数定义了在搜索半径内要考虑的最大最近邻点数目。增大该值可以提高算法的稳定性,但也会增加计算时间。
setMaximumSurfaceAngle(double angle):设置最大表面角度。该参数定义了三角化表面的最大允许角度。较小的角度值会生成更平滑的表面,而较大的角度值会生成更粗糙的表面。
setMinimumAngle(double angle):设置最小角度。该参数定义了三角形的最小允许角度。较小的角度值可以生成更细致的细节,但也可能导致不稳定的三角形。
setMaximumAngle(double angle):设置最大角度。该参数定义了三角形的最大允许角度。较大的角度值可以生成更平坦的表面,但也可能导致模型的失真。
setNormalConsistency(bool consistent):设置法向量一致性。该参数定义了是否要在计算法向量时考虑法向量的一致性。启用法向量一致性可以提高三角化的质量。
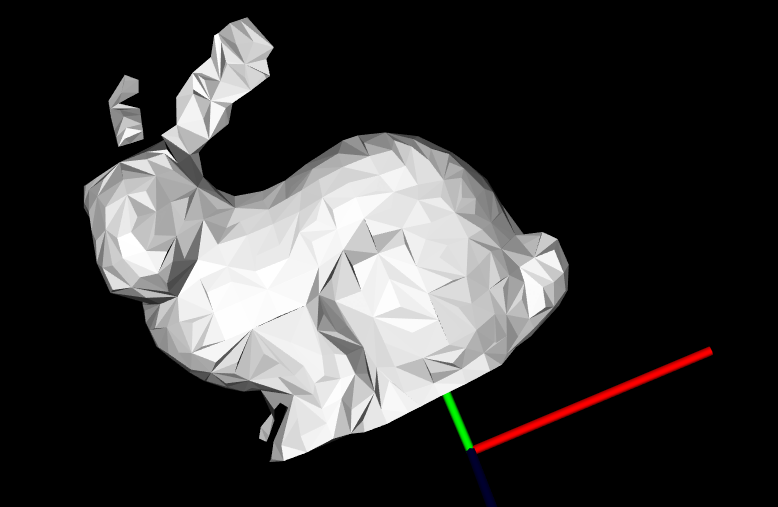
2 处理过程可视化

3 代码
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/search/kdtree.h>
#include <pcl/features/normal_3d.h>
#include <pcl/surface/gp3.h>
#include <pcl/visualization/pcl_visualizer.h>
int main()
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PCLPointCloud2 cloud_blob;
pcl::io::loadPCDFile("/home/lrj/work/pointCloudData/bun0.pcd", cloud_blob);
pcl::fromPCLPointCloud2(cloud_blob, *cloud);
// Normal estimation*
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>);
tree->setInputCloud(cloud);
ne.setInputCloud(cloud);
ne.setSearchMethod(tree);
ne.setKSearch(20);
pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>);
ne.compute(*normals);
//* normals contain the point normals + surface curvatures
pcl::PointCloud<pcl::PointNormal>::Ptr cloud_with_normals(new pcl::PointCloud<pcl::PointNormal>);
pcl::concatenateFields(*cloud, *normals, *cloud_with_normals);
pcl::search::KdTree<pcl::PointNormal>::Ptr tree2(new pcl::search::KdTree<pcl::PointNormal>);
tree2->setInputCloud(cloud_with_normals);
pcl::GreedyProjectionTriangulation<pcl::PointNormal> gp3;
pcl::PolygonMesh triangles;
gp3.setSearchRadius(0.1);
gp3.setMu(2.5);
gp3.setMaximumNearestNeighbors(100);
gp3.setMaximumSurfaceAngle(M_PI*1.5);
gp3.setMinimumAngle(M_PI/180);
gp3.setMaximumAngle(2*M_PI/3);
gp3.setNormalConsistency(false);
gp3.setInputCloud(cloud_with_normals);
gp3.setSearchMethod(tree2);
gp3.reconstruct(triangles);
std::vector<int> parts = gp3.getPartIDs();
std::vector<int> states = gp3.getPointStates();
pcl::visualization::PCLVisualizer vis("cloud visualization");
vis.addCoordinateSystem(0.1);
vis.addPolygonMesh(triangles);
while(!vis.wasStopped())
{
vis.spinOnce();
}
}