作者 | PaperWeekly 编辑 | 极市平台
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【大模型】技术交流群
本文只做学术分享,如有侵权,联系删文
导读
智源研究院视觉团队推出以视觉感知为中心的基础模型 TAP (Tokenize Anything via Prompting), 利用视觉提示同时完成任意区域的分割、识别与描述任务。将基于提示的分割一切基础模型 (SAM) 升级为标记一切基础模型 (TAP) ,高效地在单一视觉模型中实现对任意区域的空间理解和语义理解。
在计算机视觉领域,分割被视为感知的基础要素。通过分割,系统得以准确地定位和区分图像中的各个对象,为更深层次的感知提供了必要基础。全面的视觉感知不仅包括对图像进行分割,更涵盖对图像中对象与场景的语义理解、关系推断等高层次认知。
现有的视觉分割基础模型,如 SAM 及其变体,集中优势在形状、边缘等初级定位感知,或依赖外部模型完成更高级的语义理解任务。然而,迈向更高效的视觉感知则需要在单个模型中实现全面的视觉理解,以助力于更广泛的应用场景,如自动驾驶、安防监控、遥感以及医学图像分析等。
近日,智源研究院视觉团队推出以视觉感知为中心的基础模型 TAP (Tokenize Anything via Prompting), 利用视觉提示同时完成任意区域的分割、识别与描述任务。将基于提示的分割一切基础模型 (SAM) 升级为标记一切基础模型 (TAP) ,高效地在单一视觉模型中实现对任意区域的空间理解和语义理解。相关的模型、代码均已开源,并提供了 Demo 试用,更多技术细节请参考 TAP 论文。
论文地址:
https://arxiv.org/abs/2312.09128
项目&代码:
https://github.com/baaivision/tokenize-anything
模型地址:
https://huggingface.co/BAAI/tokenize-anything
Demo:
https://huggingface.co/spaces/BAAI/tokenize-anything

模型介绍
1.1 亮点
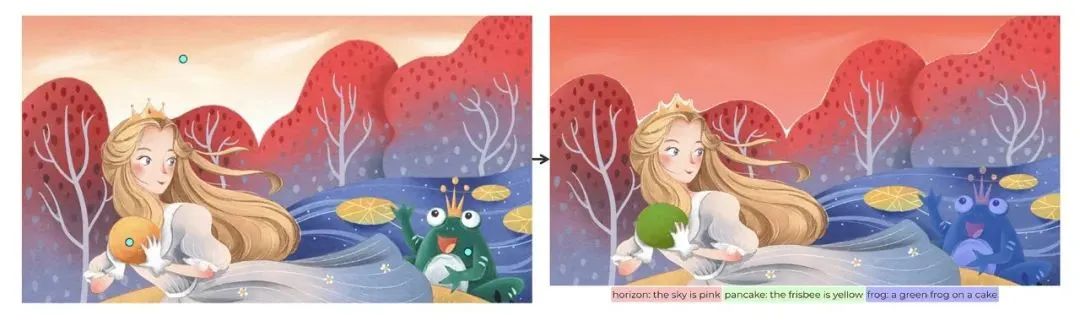
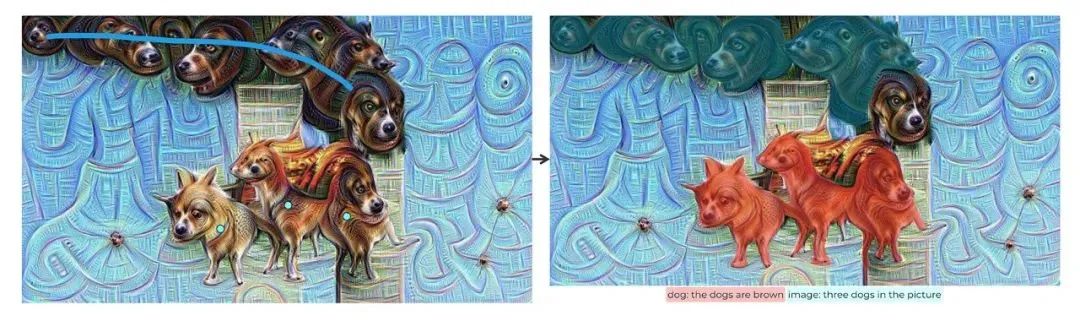
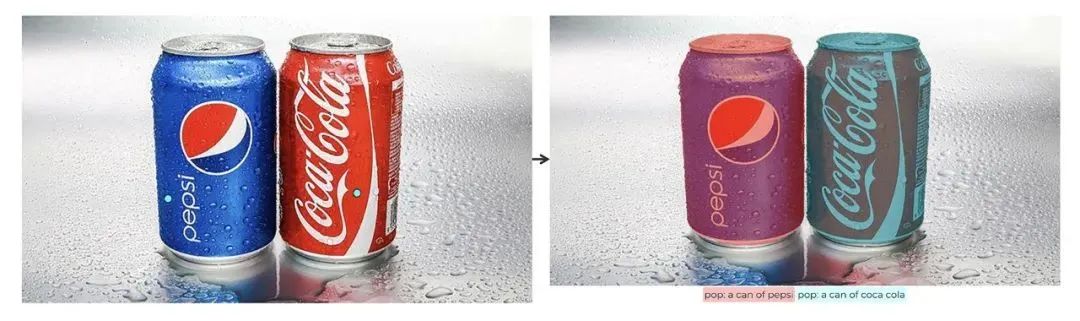
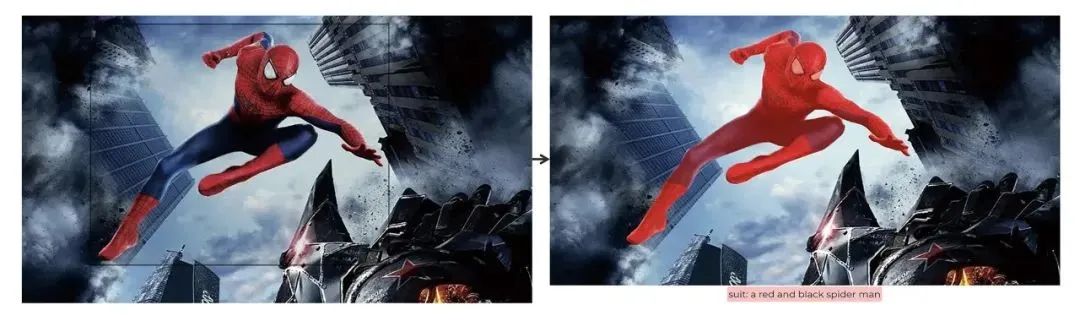
通用能力:TAP 是一个统一的可提示视觉基础模型,根据视觉提示(点、框、涂鸦)对任意区域内的目标同时进行分割、识别以及描述,最终汇聚成一组可用于综合评估区域内容的输出结果。
通用表征:TAP 将任意区域中的内容表示为紧凑的掩码标记和语义标记,掩码标记负责空间理解,语义标记则负责语义理解。因此,TAP 模型可以替代 SAM,CLIP 作为下游应用的新基础模型。
通用预训练:TAP 利用大量无语义的分割掩码,直接从通用 CLIP 模型中汲取开放世界知识。这种预训练新范式避免了使用与任意数据集相关的有偏差人工标注,缓解了物体在开放语义下的定义冲突与不完备问题。
1.2 方法
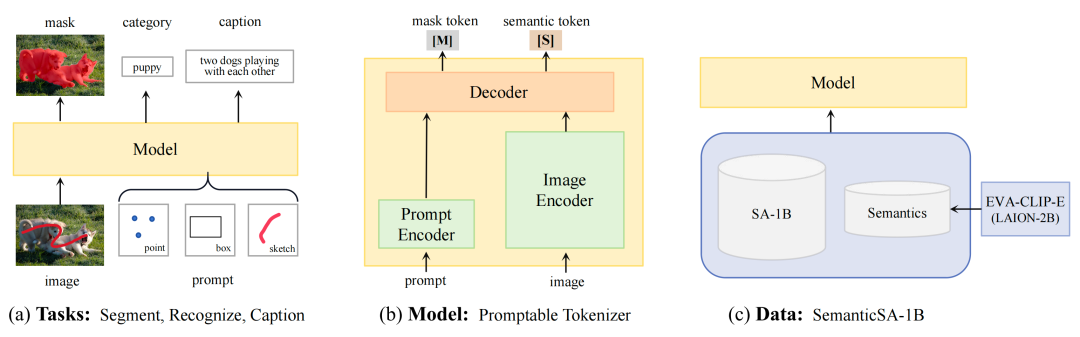
视觉感知中的一个关键研究目标是如何高效地定位与识别任意感兴趣区域。这要求单一的可提示视觉模型同时具备分割、识别、与描述能力来充分地理解任意区域中的内容。同时,通过观察模型的多角度输出(分割、识别、文本生成),可以更加充分地评估和解释模型的理解能力(图a)。
现有的视觉基础模型因其预训练目标的不同,通常集中优势在单一的任务。例如 SAM 专注于空间理解能力,可以定位出与语义类别无关的分割掩码。另一方面,CLIP 及其各种变体则在视觉语义理解方面表现出色。因此,在 SAM 的架构中学习 CLIP 模型的语义先验,为全面的视觉感知提供了一个有效的途径。TAP 沿这一途径提出了如下的核心设计:
模型架构:为了实现一个统一的模型,TAP 在 SAM 架构的基础上,将掩码解码器升级为通用的图像解码器,同时输出掩码标记与语义标记(图b)。掩码标记负责预测分割掩码,语义标记则用于预测对应的语义标签和文本描述。
数据获取:训练一个多能力的视觉基础模型需要多样化标注的大规模数据集。然而,目前尚无公开的可同时用于分割与区域识别的大规模数据源。SA-1B 构建了 11 亿高质量掩码标注,用于训练分割基础模型,如 SAM。LAION-2B 收集了 20 亿图像-文本对,用于训练图文对齐模型,如 CLIP。
为了解决分割-文本对齐数据缺乏的问题,TAP 引入了 SemanticSA-1B 数据集(图c)。该数据集将来自 LAION-2B 的语义隐式地集成到 SA-1B 的分割数据中。具体而言,TAP 利用在 LAION-2B 数据集上训练的具有 50 亿参数的 EVA-CLIP 模型,预测 SA-1B 中的每一个分割区域在一个概念词汇上的分布。该分布提供信息最大化的语义监督, 避免模型在偏差过大的伪标签上训练。
模型训练:TAP 模型在 256 块寒武纪 MLU370 加速器上进行预训练,并行优化可提示分割与概念预测两个任务。给定一张图片及一个视觉提示,TAP 模型将感兴趣区域表示为一个掩码标记和一个语义标记。基于语义标记,扩展一个 MLP 预测器可实现开放词汇分类任务。同时,扩展一个轻量化的自回归文本解码器即可实现文本生成任务。

量化结果、可视化展示
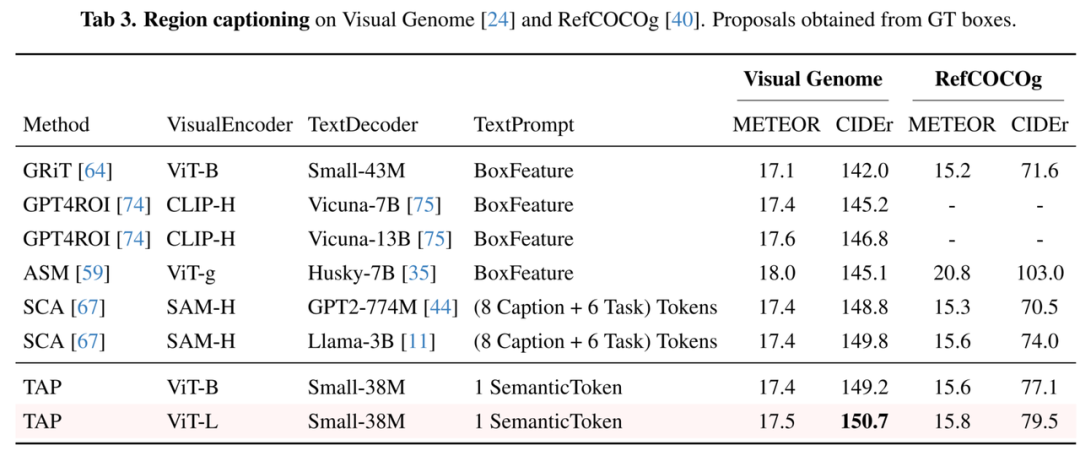
TAP 模型在零样本实例分割任务中取得了与 SAM 接近的分割精度(表1)。在零样本LVIS实例识别任务中,TAP 性能趋近于有监督检测模型的基线(表2)。基于 TAP 扩展的 38M 参数“小语言模型”在 Visual Genome 区域描述任务中取得了当前最优的 CIDEr 基准(表3),且参数量仅为此前最优方案 LLAMA-3B 的 1%。


简单点击或涂鸦图片中感兴趣的目标,TAP 即可自动生成目标区域的分割掩码、类别标签、以及对应的文本描述,实现了一个模型同时完成任意的分割、分类和图像描述。
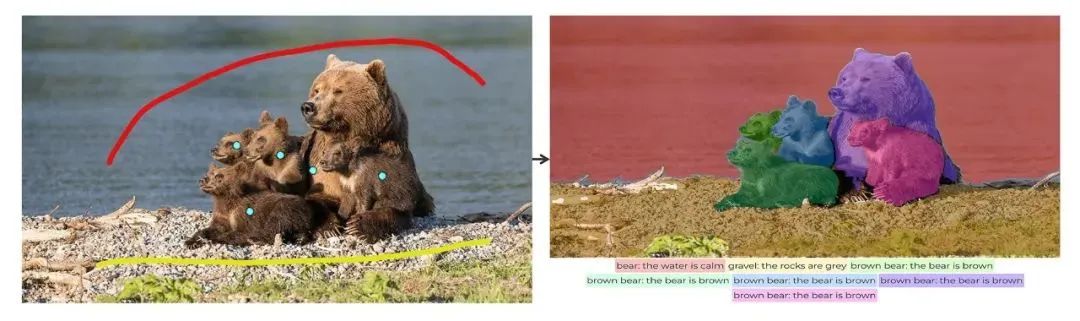

对于需要全景理解的场景,采用密集网格点作为提示,模型即可对场景内所有的目标进行分割、识别以及描述。


参考文献
[1] Alexander Kirillov, et al. Segment anything. ICCV, 2023.
[2] Alec Radford, et al. Learning Transferable Visual Models from Natural Language Supervision. ICML, 2021.
[3] Sun, et al. EVA-CLIP: Improved Training Techniques for CLIP at Scale. arXiv:2303.15389, 2023.
[4] Schuhmann, et al. LAION-5B: An Open Large-scale Dataset for Training Next Generation Image-Text Models. arXiv:2210.08402, 2023.
投稿作者为『自动驾驶之心知识星球』特邀嘉宾,欢迎加入交流!
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、大模型与自动驾驶、Nerf、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)
 视频官网:www.zdjszx.com
视频官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
近2400人的交流社区,涉及30+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(2D检测、分割、2D/3D车道线、BEV感知、3D目标检测、Occupancy、多传感器融合、多传感器标定、目标跟踪、光流估计)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、点云处理、端到端自动驾驶、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】平台矩阵,欢迎联系我们!
