复现结果
在 PointGoal1、CarGoal1、Velocity-Walker2d 三个任务上测试了 RCPO,CRPO 以及 Safe-Policy-Optimization 中实现的 CPO,PPO-Lag 算法。
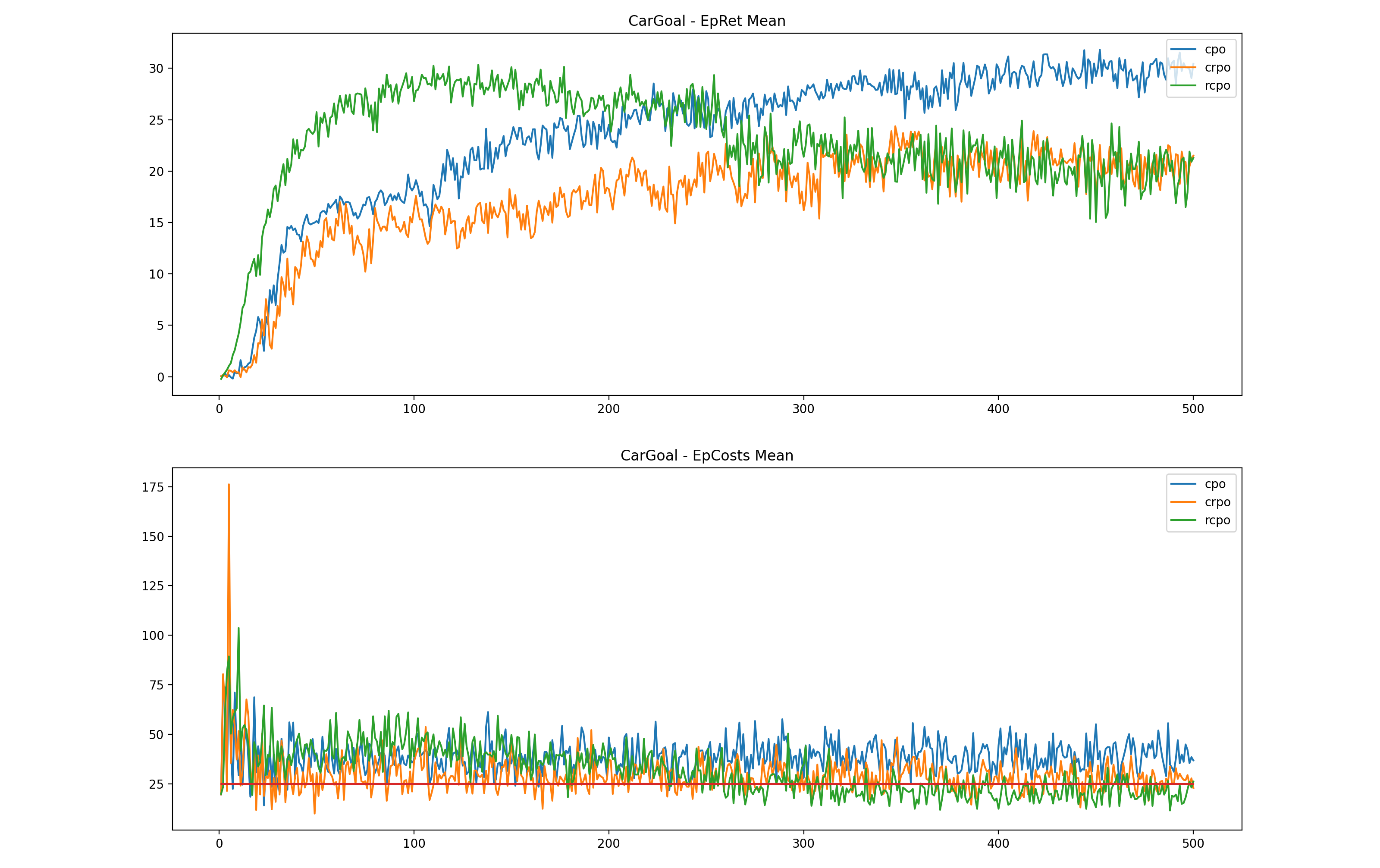
CarGoal
PointGoal
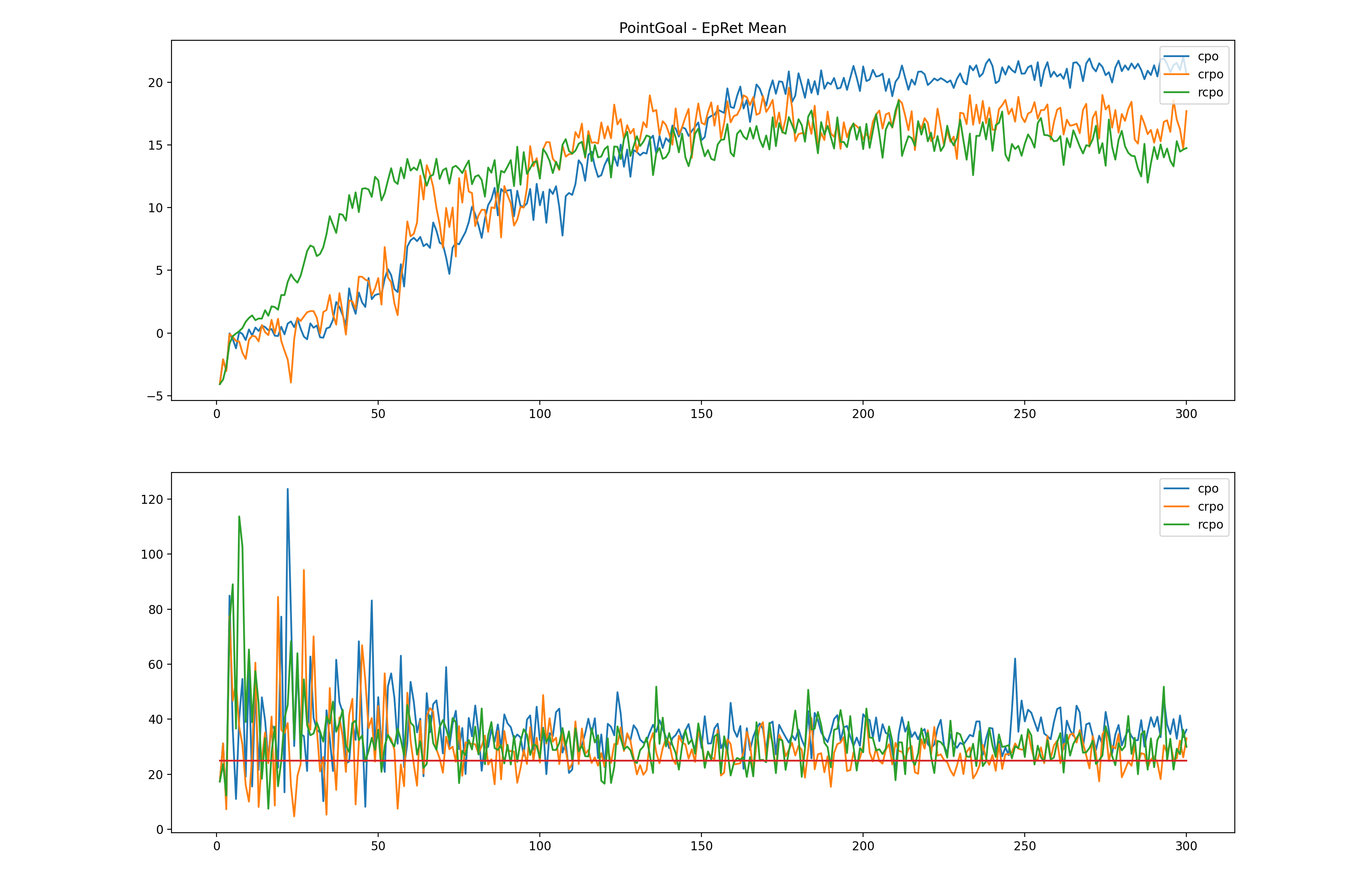
PointGoal1 和 CarGoal1 任务相对比较困难,在探索初期就很容易违反约束。
PPO-Lag 和 TRPO-Lag 都不能得到满足约束的解,故没有在途中画出。
使用 RCPO 将拉格朗日乘子初值设置为 2 之后,可以跑出可行解,但是 reward 不高,且仍然会出现震荡的现象。
使用 CRPO 可以跑出可行解,reward 与 RCPO 持平,后面会对其进行修改。
另外尝试使用 CPO,发现虽然 reward 最高,但是得不到可行解。
Walker2d
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-6jjGDce1-1689530625453)(results.assets/wk.png)]](https://img-blog.csdnimg.cn/6d7b9ebd57e94188a2c5912cb50f02bf.png)
在 Velocity-Walker2d 中使用 ppo-lag 会产生周期性的震荡。原因是 KaTeX parse error: Undefined control sequence: \part at position 7: \frac{\̲p̲a̲r̲t̲ ̲L}{\part\lambda…,而 λ \lambda λ 增大又会使得 EpCosts 减小。如果 λ \lambda λ 更新过快,就会导致这两个过程的时间差较长,从而产生周期较大的波动。
这个任务比较简单,其他的算法差别不大。
对CRPO的改进
在PointGoal1 和 CarGoal1中发现 CRPO 训练过程中不稳定,而且训练到一定程度的时候 reward 难以继续提高。因为这两个任务的约束比较强,即使在没有充分探索的前期就很容易违反约束。CRPO 在违反约束时立即转向,导致很容易被束缚住而探索不到好的策略。同时,cost 负梯度和 reward 梯度的方向一般是相反的,就会导致参数发生震荡。
因此做了两点改进:
- 减小学习率。
- 在违反约束时参数更新方向不再是单一的减小 cost 的方向,而是 cost 的负梯度 * alpha + reward 的梯度 * (1-alpha)
第 2 点中的 alpha 尝试了固定值(0.7,0.85)以及自适应值(类似 PDO 更新拉格朗日乘子),发现自适应的更新 alpha 效果更好,与改进前相比,前期训练表现提升较快,也能得到满足约束的解,并且 reward 有较大提高。当然,与标准的 CRPO 相比这会导致训练过程中存在违反约束的时间增加。
CarGoal
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-zTJMjRj3-1689530625454)(results.assets/cg2.png)]](https://img-blog.csdnimg.cn/e7e2b606ecc94e16a6af1bc42a421867.png)
PointGoal
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-vJCGPaD4-1689530625454)(results.assets/pg2.png)]](https://img-blog.csdnimg.cn/7133a6c7408b4906ab34def45eaa36dc.png)
思考
构造拉格朗日函数:
L ( θ , λ ) = J R π θ − λ ⋅ ( J C π θ − d ) L(\theta, \lambda)=J_R^{\pi_\theta} - \lambda\cdot(J_C^{\pi_\theta}-d) L(θ,λ)=JRπθ−λ⋅(JCπθ−d)
原问题等价于如下无约束问题:
max θ min λ ≥ 0 L ( θ , λ ) \max_\theta \min_{\lambda\geq 0} L(\theta, \lambda) θmaxλ≥0minL(θ,λ)
其拉格朗日对偶问题是原问题的一个上界:
min λ ≥ 0 max θ L ( θ , λ ) \min_{\lambda\geq 0}\max_\theta L(\theta, \lambda) λ≥0minθmaxL(θ,λ)
PDO 以及 RCPO 优化的是对偶问题,用较快速度更新 θ \theta θ,较慢速度更新 λ \lambda λ。
而 CRPO 可以看作直接优化原问题:给定一个 θ \theta θ,如果约束都被满足,那么最优的 λ \lambda λ 为 0,此时对 θ \theta θ 求梯度就是 J R π θ J_R^{\pi_\theta} JRπθ 对 θ \theta θ 的梯度;如果有一个约束没有满足,那么对应的 λ \lambda λ 会趋向无穷大,这时对 θ \theta θ 求梯度就是 J C π θ J_C^{\pi_\theta} JCπθ 对 θ \theta θ 的梯度。
由此猜测对于多约束问题,除了论文中的随机挑选一个违反的约束进行优化,可能还可以同时优化所有违反的约束。
局限性
PDO,RCPO 也可以看作是 reward shaping 的方法。虽然不再需要手动调节参数,但是 lambda 初值和学习率设置不当会导致训练难以收敛。如果学习率过高,表现也会周期性波动;如果过低,就很难收敛到合法解。同样,如果 lambda 初值距离最优值太远,也会很难收敛到合法解。
而 CRPO 在训练后期震荡还是比较明显。