CARLA_autoware的配置流程(一)CARLA 的快速入门与安装
参考文档
Quick start installation - CARLA Simulator
CARLA 官方的说明文档中在 Linux 的安装中提供了两种方式
- 快速入门安装使用 CARLA 的预打包版本
- Linux 源码构建
这里要根据使用需求来选择,如果你的配置重点是 autoware 自动驾驶控制平台本身,CARLA 自动驾驶仿真平台只是用于感知部分的来源与 autoware 控制测试,并不需要自定义地图场景与自定义车辆,那就可以选择预打包版本
如果除了上述说的需求之外,还要自定义地图场景与自定义车辆,需要选择 Linux 源码构建
本次流程的使用的是快速入门的预打包版本
需要注意 CARLA 官方文档中的右下角有版本的选择,本次系列流程的都使用的 0.9.11 版本

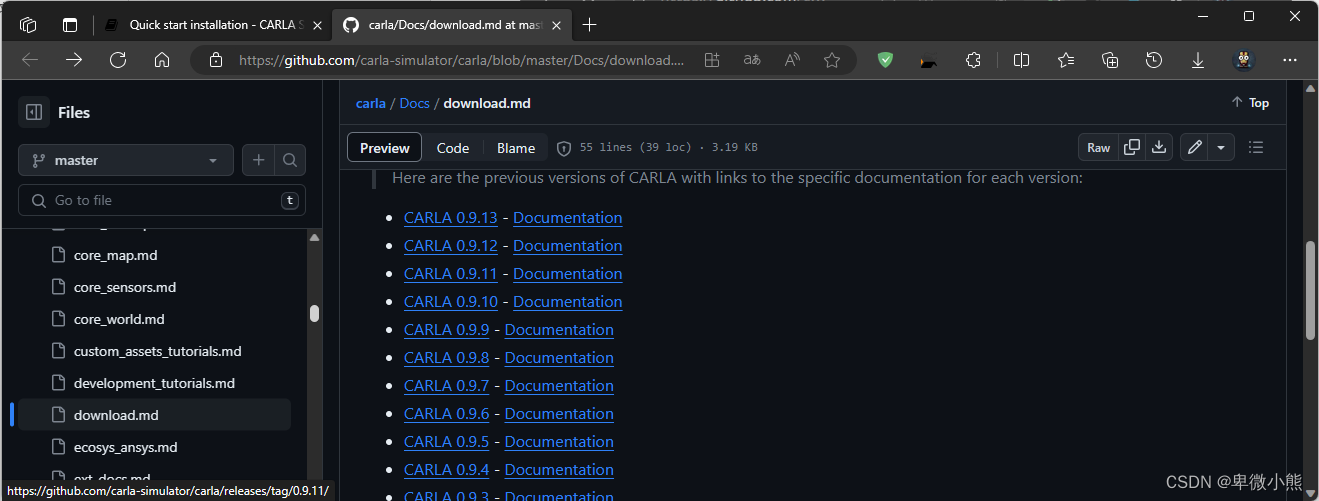
这个页面往下翻翻,有个Package installation安装方式,有一个去到 github 的链接,点进去
carla/Docs/download.md at master · carla-simulator/carla (github.com)
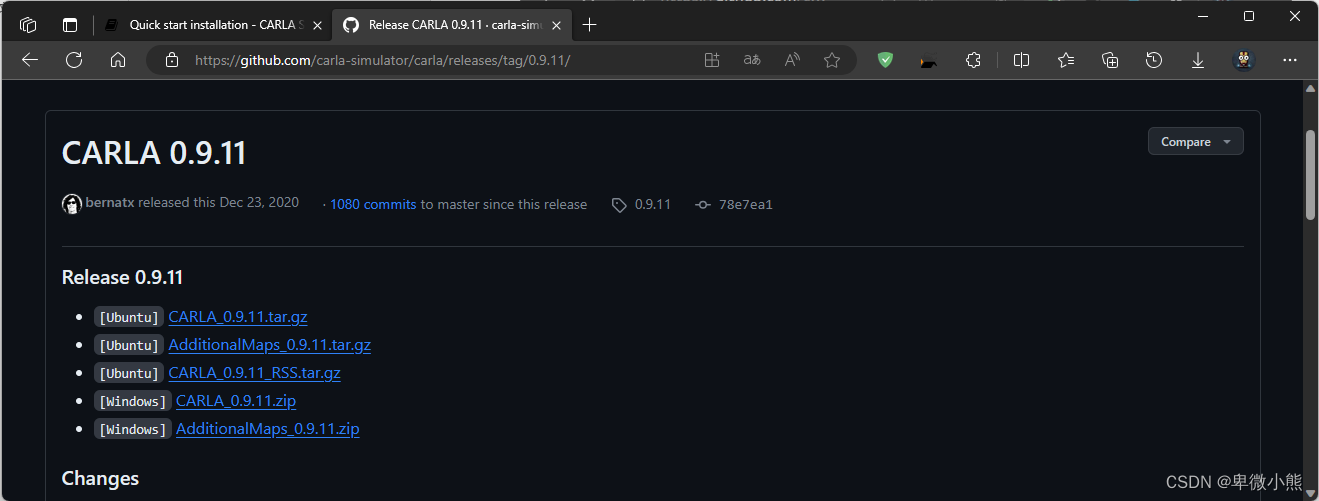
选择CARLA0.9.11
然后点击下载CARLA0.9.11.tar.gz
当下载并解压到主目录成功后
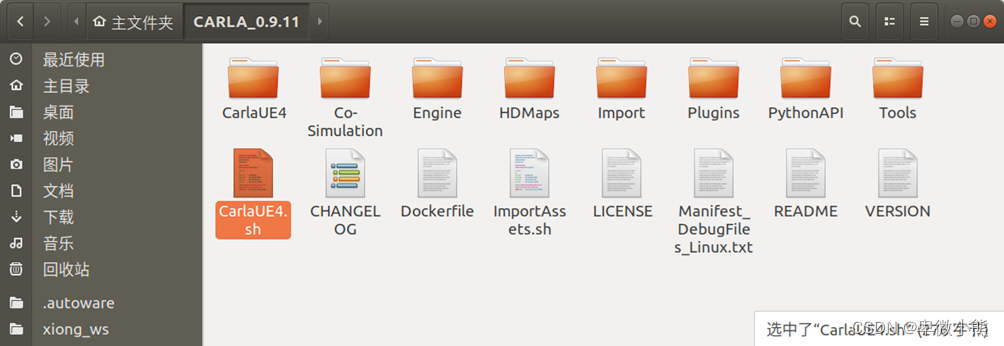
运行脚本,似乎是CARLA强制使用了集成显卡,而没有使用 NVIDIA 显卡。通过如下命令,可以正常运行:
cd CARLA_0.9.11/
./CarlaUE4.sh -prefernvidia # 需要添加 -prefernvidia 参数调用 NVIDIA 显卡

弹出一个包含城市景观的窗口。这是第三人称视角。要在城市中飞行,使用鼠标和按键(单击时)。服务器模拟器现在正在运行,并等待客户端与世界连接和交互。
那么官方文档中有这样一段话
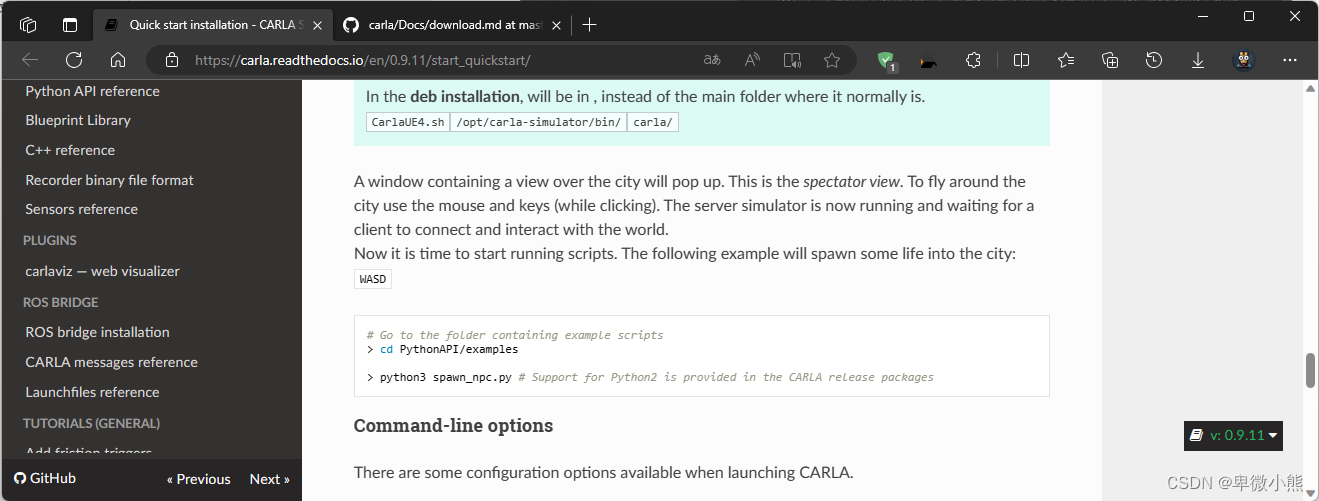
还可以运行脚本添加 NPC,不过我若使用 python3 运行的话会报错
cd PythonAPI/examples/
python spawn_npc.py
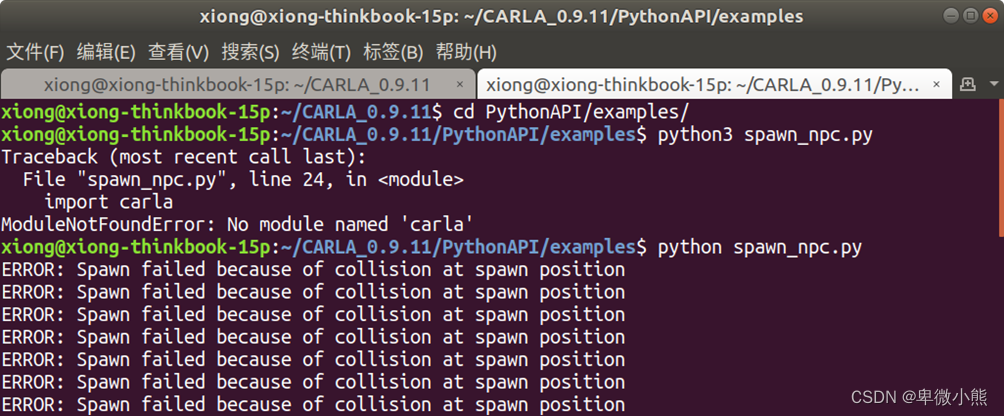
运行完成后便有了车辆与行人
